

连接自动驾驶仪
https://ardupilot.org/copter/docs/common-installing-3dr-ublox-gps-compass-module.html

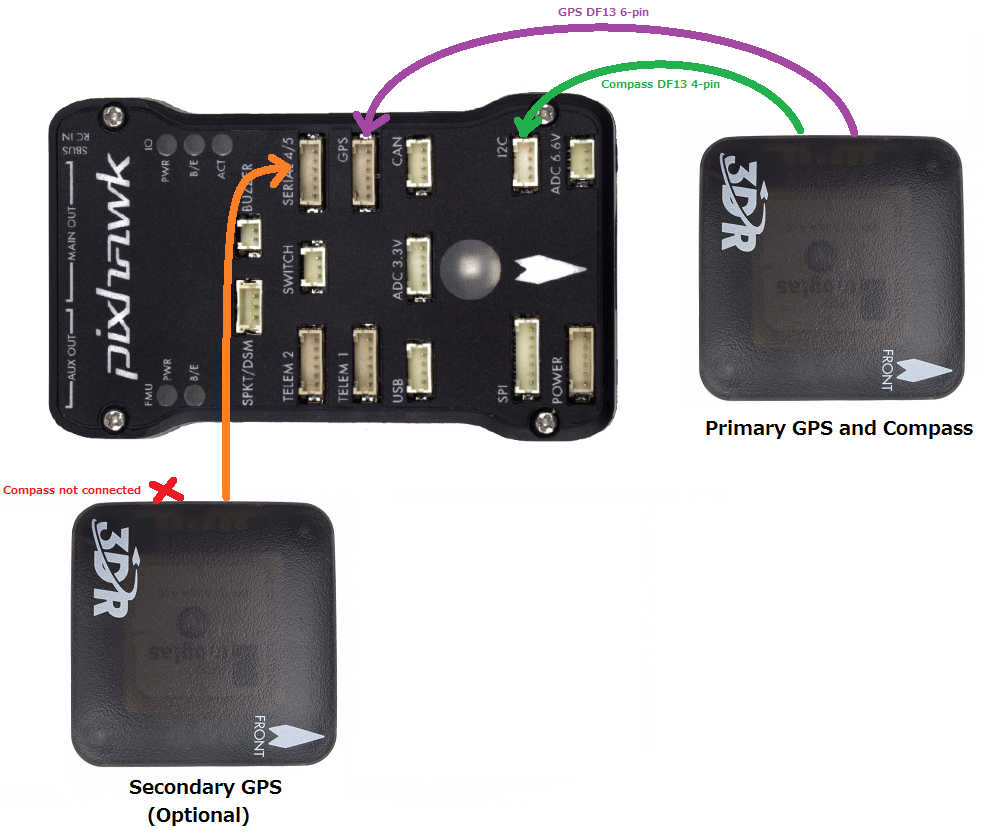
示例:连接到 Pixhawk
将 GPS 的 6 针 DF13 连接器连接到 Pixhawk 的“GPS”端口,将指南针的 4 针连接器连接到 I2C 端口。 或者,如果要连接其他 I2C 设备,则可以首先通过I2C 分离器连接罗盘。
安装 GPS+指南针模块时:
- 将模块放置在您的车辆外部(如果合适,放置在较高的位置),可以清楚地看到天空,尽可能远离电机和 ESC,箭头朝前。
- 模块与直流电源线和电池之间的距离至少为 10 厘米。 强烈建议使用GPS 桅杆。
- 将模块放置在远离附近含铁的金属物体的地方。(使用尼龙或非磁性不锈钢硬件和尼龙或铝支架来安装模块)。
- 尽可能扭转电源线和地线。

LED 指示灯
3DR GPS+指南针模块有两个 LED 指示灯:一个用于电源(红色常亮),一个用于 GPS 锁定(蓝色闪烁)。大多数 GPS 都有一个用于 3D GPS 锁定获取的 LED 指示灯。
LED: 行为: 力量 通电时红色常亮 GPS锁 获得 3D GPS 锁定时闪烁蓝色 在 Mission Planner 中设置
Mission Planner 中的指南针校准解释了校准安装在推荐方向的指南针的最简单方法(自动驾驶仪的箭头和面向车辆前方的指南针)。
高级指南针设置包含校准指南针的更详细说明,例如,如果指南针安装在其他方向。

板载校准
“机载校准”是在自动驾驶仪上运行的校准程序。这种方法比在地面站上运行的旧的“车外校准”(又名“实时校准”)更准确,因为除了偏移之外,缩放和方向也是自动确定的。
笔记
如果自动驾驶仪板方向参数不正确,则机载罗盘校准可能会失败。
要执行所有罗盘的板载校准:
-
单击“Onboard Mag Calibration”部分的“Start”按钮
-
如果您的自动驾驶仪连接了蜂鸣器,您应该会听到一声单音,然后是每秒一次的短哔声
-
将车辆悬空并旋转,使每一侧(前、后、左、右、上和下)依次指向地面几秒钟。考虑一个完整的 360 度转弯,每个转弯都指向车辆与地面的不同方向。这将导致 6 整圈加上可能一些额外的时间和圈来确认校准或重试,如果它最初没有通过。

-
当车辆旋转时,绿色条应越来越向右延伸,直到校准完成
-
成功完成后,将发出三个上升音,并出现“请重新启动自动驾驶仪”窗口,您需要重新启动自动驾驶仪才能武装车辆。
如果校准失败:
- 您将听到“不愉快”的故障音,绿条可能会重置到左侧,并且校准程序可能会重新启动(取决于地面站)。Mission Planner 将自动重试,因此请按照上述说明继续旋转载具。
- 如果指南针未校准,请考虑移至远离磁场干扰的其他区域,并从口袋中取出电子设备。
- 如果多次尝试后指南针仍未通过校准,请按“取消”按钮并将“健身”下拉菜单更改为更宽松的设置,然后重试。
- 如果指南针校准仍然失败,将COMPASS_OFFS_MAX从 850 提高到 2000 甚至 3000可能会有所帮助
- 最后,如果一个指南针没有校准并且您信任其他指南针,请禁用它。
-

