

官网介绍
https://ardupilot.org/copter/docs/common-rc-transmitter-flight-mode-configuration.html#common-rc-transmitter-flight-mode-configuration
国外
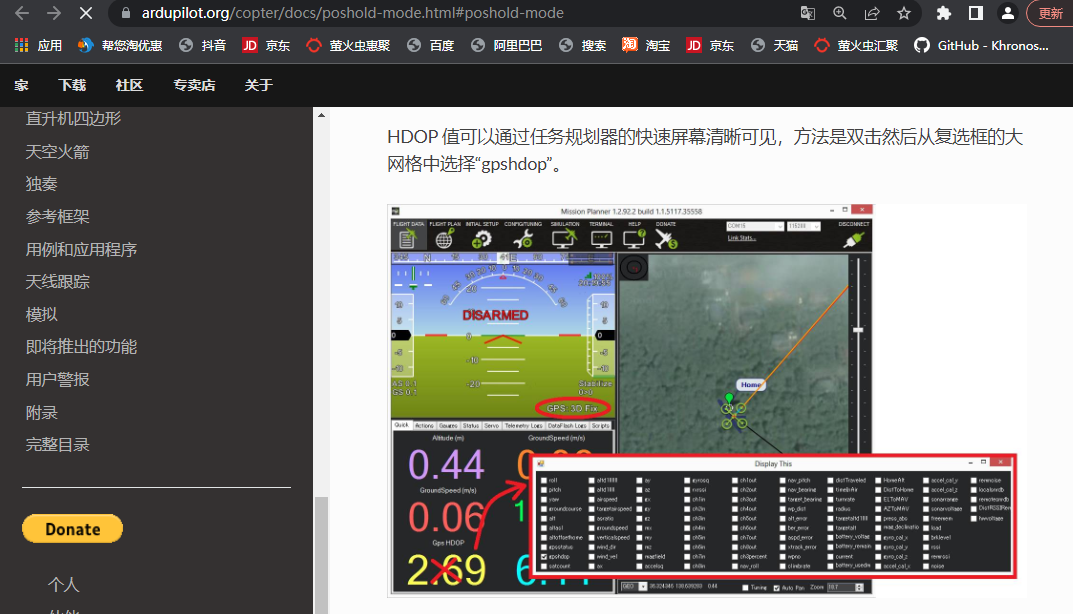
https://ardupilot.org/copter/docs/poshold-mode.html#poshold-mode
国内
https://doc.cuav.net/tutorial/copter/flight-modes/flight-modes/flight-modes/flight-modes/flight-modes/flight-modes/PosHold.md

| 模式 | 高度控制 | 姿态控制 | GPS定位 | 注释摘要 |
|---|---|---|---|---|
| Acro | - | - | 保持姿态,但没有自我平衡水平 | |
| Airmode | - | -/+ | 实际上不是模式,而是功能,请参见下文 | |
| Alt Hold | s | + | 保持高度并自动调整水平和俯仰 | |
| Auto | A | A | Y | 执行预定义的任务 |
| Autonomous Autorotation | A | A | Y | 用于传统直升机的紧急情况。仅直升机。目前仅SITL。 |
| AutoTune | s | A | Y | 自动调整pid参数 |
| Brake | s | A | Y | 使无人机立即停止 |
| Circle | s | A | Y | 绕点飞行 |
| Drift | - | + | Y | 与自稳模式相似,但能调整偏航 |
| Flip | A | A | 上升并完成自动翻转 | |
| FlowHold | s | A | 基于光流的位置控制 | |
| Follow | s | A | Y | 跟随另外一家飞机 |
| Guided | A | A | Y | 导航到GCS指定的单点 |
| Land | A | s | (Y) | 降落到地面 |
| Loiter | s | s | Y | 保持高度和位置,基于GPS位置进行移动 |
| PosHold | s | + | Y | 保持高度与位置,,但当摇杆未居中时使用手动横滚和俯仰(移动速度更快) |
| RTL | A | A | Y | 返航到起始位置上方,对于多旋翼包括降落 |
| Simple/Super Simple | ÿ | 飞行模式的附加功能,飞行员的视角而不是飞机航向 | ||
| SmartRTL | A | A | Y | 与RTL相似,但会根据历史轨迹回溯返航路径 |
| Sport | s | s | 保持高度,但当操纵杆居中时,保持俯仰和横滚 | |
| Stabilize | - | + | 自动维持俯仰和横滚 | |
| SysID | - | + | 特殊的诊断/建模模式 | |
| Throw | A | A | Y | 投掷后保持姿势 |
| ZigZag | A | A | Y | 类似于AB点,但尚未成熟 |
| 模式 | 高度控制 |
|---|---|
| - | 手动 |
| + | 具有限制和自我水平的手动控制 |
| S | 飞行员控制爬升率 |
| A | 自动控制 |
推荐使用的飞行模式
飞行模式
1、稳定模式Stabilize
稳定模式是使用得最多的飞行模式,也是最基本的飞行模式,起飞和降落都应该使用此模式。
此模式下,飞控会让飞行器保持稳定,是初学者进行一般飞行的首选,也是FPV第一视角飞行的最佳模式。
一定要确保遥控器上的开关能很方便无误地拨到该模式,这对抢救紧急情况十分重要!
2、定高模式ALT_HOLD
初次试飞之后就可以尝试定高模式,此模式不需要GPS支持,APM会根据气压传感器的数据保持当前高度。
定高时如果不会定点,因此飞行器依然会漂移。可以遥控来移动或保持位置。
定高时就是APM控制油门来保持高度。但仍然可以用遥控油门来调整高度,不可以用来降落,因为油门不会降到0。
稳定模式和定高模式之间切换时,要让遥控发射机的油门在同一位置,避免因模式切换、油门控制方式发生变化造成飞行器突然上升或者下降。
3、留待模式Loiter
悬停模式就是GPS定点模式。应该在起飞前先让GPS定点,避免在空中突然定位发生问题。其他方面跟定高模式基本相同。
4、简单模式Simple Mode
设置过APM飞行模式的朋友都会注意到,软件界面的各个模式旁边,都有个“Simple Mode”简单模式的勾选框。勾了这个框之后的模式,飞行中会更加简单:
不用再管飞行器机头的朝向,可以将飞行器看成一个点,如果升降舵给出俯冲指令,飞行器就会飞得远离操作者;反之如果给出拉杆指令,飞行器会飞回操作者;给出向左滚转的指令,飞行器会向左飞,反之亦然。。。注意,这些前后左右的飞行,是不管当时的机头指向的!
5、返航模式RTL
返航模式需要GPS定位。GPS在每次ARM前的定位点,就是当前的“家”的位置;GPS如果在起飞前没有定位,在空中首次定位的那个点,就会成为“家”。
进入返航模式后,飞行器会升高到15米,或者如果已经高于15米,就保持当前高度,然后飞回“家”。
还可以设置高级参数选择到“家”后是否自主降落,和悬停多少秒之后自动降落。
一般来讲,当第一次使用APM:Copter的时候,你应该依次使用下列飞行模式获得提高,要保证熟练了再进行下一个。
点击下方任意飞行模式可获得更多信息。
- Stabilize (增稳模式)
- Alt Hold (定高模式、高度保持模式)
- Loiter (悬停模式)
- RTL (Return-to-Launch) (回家模式:返回起飞点)
- Auto (自动模式:自动航点飞行,需要依靠GPS)
其他飞行模式:
- Acro 特技模式(没有飞控辅助增稳的模式)
- AutoTune 自动微调(当飞机往一个严重偏的时候,可以执行自动微调)
- Brake 刹车锁定模式(将飞机锁定在一个位置,而不受遥控器摇杆影响)
- Circle 绕圈模式(绕着兴趣点画圈)
- Drift 漂移模式
- Drift 漂移模式
- FLIP 翻转模式
- Flowhold 使用光流的保持模式
- Guided_NoGPS 引导模式-不需要GPS
- Land 降落模式
- PosHold 定点模式
- Sport 运动模块
- Throw 抛飞模式(把无人机抛在空中,自动起飞稳定)
- Follow 跟随模式(跟随另外一架设备)
- Follow Me 跟随我模式(无人机跟着你飞行,但是需要GPS和手机地面站配合)
- Simple and Super Simple 简单和超级简单模式
- Smart RTL 智能返航模式
- RTL 返航模式
- SysID 系统标识
- ZigZag Z型模式
- Avoid_ADSB (基于ADSB的避让载人飞机模式。需要外界ADSB模块)
- 大多数遥控器只有一个三段开关,所以只能设置三种模式。如果需要设置6种模式,可以进行开关混控
需要依赖GPS的飞行模式:
有些飞行模式需要依赖GPS才能飞行,你可以通过状态灯或者地面站获知GPS是否已经锁定。
以下飞行模式需要GPS锁定才能解锁飞行:
- Loiter 悬停模式
- RTL (Return-to-Launch) 回家模式
- Auto 自动模式
- Guided 引导模式
- Drift 漂移模式
- PosHold 定点模式
- Follow 跟随模式(跟随另外一架设备)
- Follow Me 跟随模式
- Circle 绕圈模式
- Throw 抛飞模式
- Smart RTL 智能返航模式
不需要依赖GPS锁定的飞行模式:
全部模式列表:(点击对应的模式查看详解)
- Acro 特技模式(没有飞控辅助增稳的模式)
- Alt Hold 定高模式、高度保持模式
- airmode 空中模式
- Auto (自动模式:执行预定义任务)
- AutoTune 自动微调(当飞机往一个严重偏的时候,可以执行自动微调)
- Brake 刹车锁定模式(将飞机锁定在一个位置,而不受遥控器摇杆影响)
- Circle 绕圈模式(绕着兴趣点画圈)
- Drift 漂移模式
- FLIP 翻转模式
- Flowhold 使用光流的保持模式
- Follow 跟随模式(跟随另外一架设备)
- Follow Me 跟随我模式(无人机跟着你飞行,但是需要GPS和手机地面站配合)
- Guided 引导模式-不需要GPS
- Land 降落模式
- Loiter 留待模式
- PosHold 定点模式
- Sport 运动模块
- Throw 抛飞模式(把无人机抛在空中,自动起飞稳定)
- Simple and Super Simple 简单和超级简单模式
- Smart RTL 智能返航模式
- RTL 返航模式
- SysID 系统标识
- ZigZag Z型模式
- Avoid_ADSB
自己的飞机模式
遥控器通道
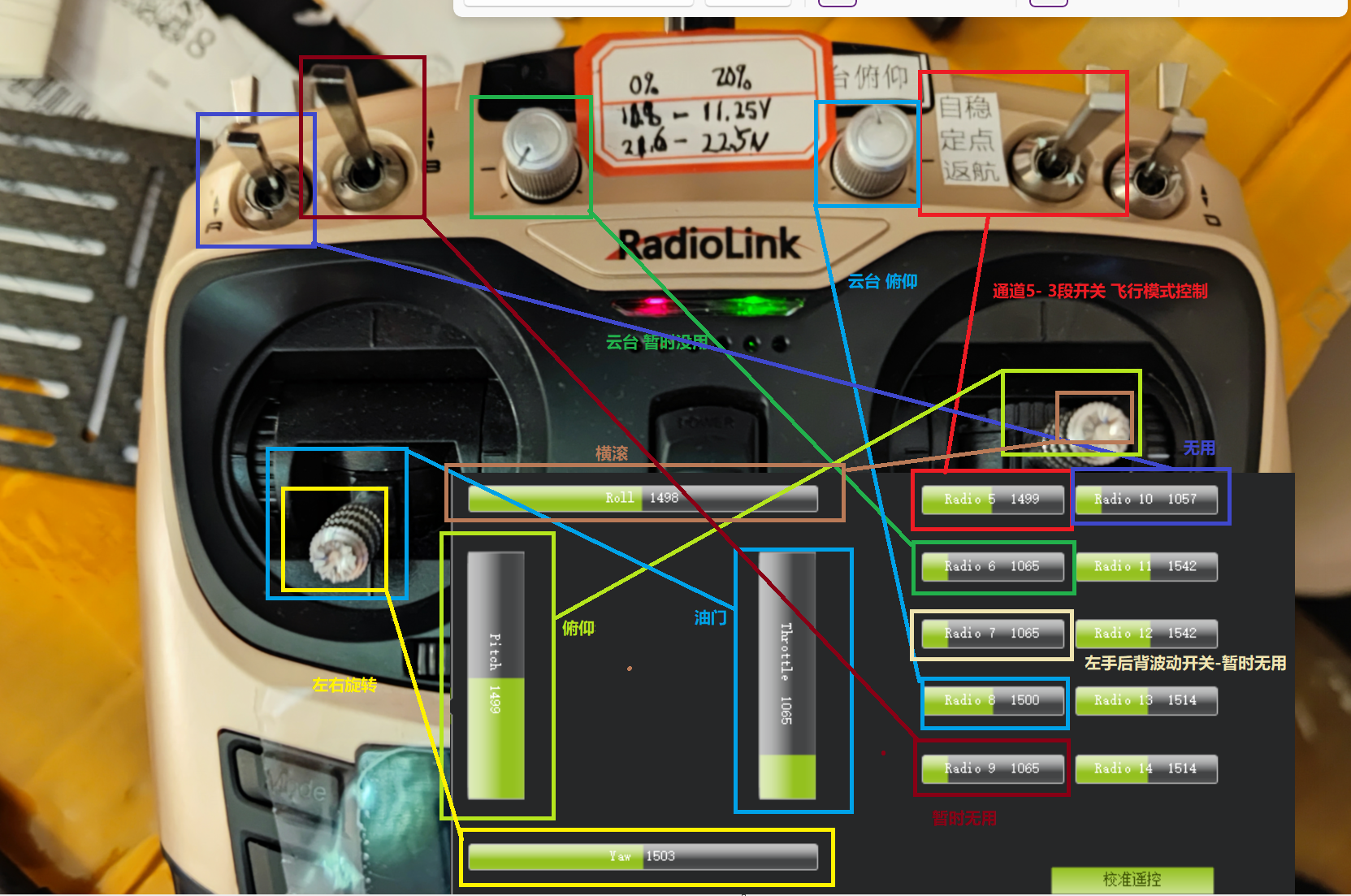
设置飞行模式通道
无人机和遥控模式对应
飞行模式频道是 ArduPilot 监控模式变化的输入无线电频道。
在直升机上,这始终是频道 5。5通道对应一个3段开关,3种模式。

如果您想支持 6 种模式,那么发射器将需要发出大约 1165、1295、1425、1555、1685 和 1815 us 的 PWM 宽度。通常,这是通过将变送器配置为混合使用两位开关和三位开关(总共提供 6 种模式)来实现的。如果有可用的模拟转盘,您也可以使用模拟转盘来执行此操作,但很难将转盘可靠地转到正确的位置以进行六种不同的设置。
-
使用每行的下拉菜单选择该开关位置的飞行模式。
-
(直升机)确保至少有一个开关位置分配给稳定。
-
(直升机)可以选择选中该开关位置的简单模式 复选框。您可以选择设置超级简单模式。如果同时选中简单模式和超级简单模式复选框,将使用超级简单模式。
-
完成后按保存模式按钮。
(直升机)也可以从辅助开关 (又名 ch7、ch8 选项开关)调用某些模式。例如,为 RTL 设置专用开关。
其他通道如何设置使用
https://doc.cuav.net/tutorial/copter/advanced-configuration/tuning.html
设置方法:
1.把某个飞行模式设置为定高模式
2把通道7或者通道8设置为自动调参开关,如图把通道七设成aututune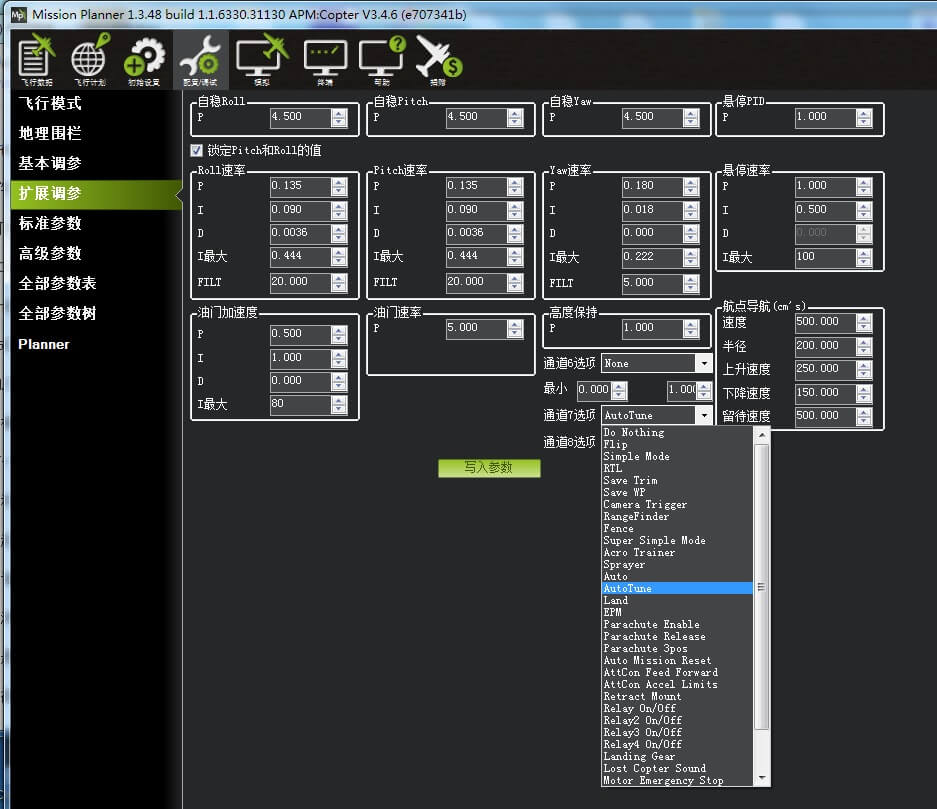
辅助功能开关
本文将展示如何设置从发射机的辅助函数调用的功能开关。 AC3.2.1和早些时候允许通道7和8作为辅助开关。 AC3.3和更高的固件
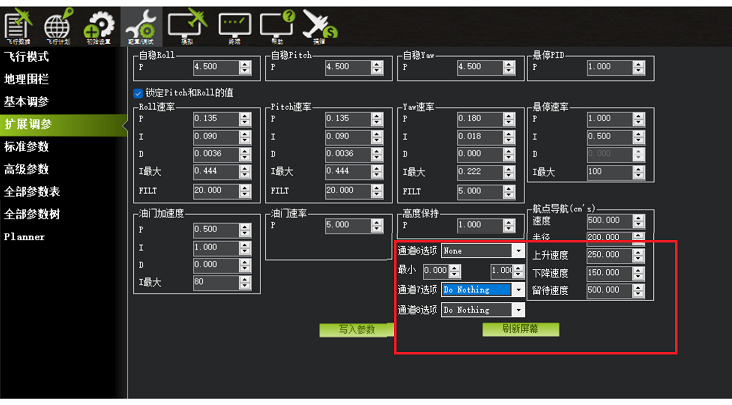
配置
默认情况下,辅助开关禁用,可以在配置/调优试|扩展 调参选项上设置开启或通过直接设置CH7_OPT,CH8_OPT,CH9_OPT,CH10_OPT,CH11_OPT,或CH12_OPT参数。 从图上可见辅助功能开关有以下功能选项:
从图上可见辅助功能开关有以下功能选项:
1.不做操作
2.翻转
3.切换到简单模式
4.返航(飞行器将返回家的位置即起点,切回低点将执行ch5对应的模式)
5.保存修改
6.保存wp
7.相机触发
8.测距仪(低位禁用高位启用)
9.围栏(低位禁用,高位启用)
10.超级简单模式
11.特技模式
12.喷雾器(低位禁用高位启用)
13.自动模式
14.自动调参模式
15降落模式
16.epm
17.降落伞使能
18.降落伞释放
19.降落伞三档(低位禁用,中位自动,高位释放)
检查Ch7和Ch8 PWM值是否达到1800
您的通道7和/或通道8 pwm值必须至少达到1800 PWM或辅助功能不会被激活。 您可以使用Mission Planner的无线电配置页面检查它是否超过此阈值。
20.重置任务
21.attcon前馈(仅供开发人员)
22.attcon accel限制(仅供开发人员)
23.REtract mount
24.继电器1开关(低位关闭,高位打开)
25.继电器2开关(低位关闭,高位打开)
26.继电器3开关(低位关闭,高位打开)
27.继电器4开关(低位关闭,高位打开)
28.起落架(低位关闭,高位打开)
29.故障报警开关
30紧急停止电机
31.电机联锁
32.刹车(高位启用切回低位将执行ch5对应的模式)
33.投掷
34.ADSB避让
35.精确悬停
36.避障
37.锁定/解锁

 浙公网安备 33010602011771号
浙公网安备 33010602011771号