

https://ardupilot.org/dev/docs/droneapi-tutorial.html

https://hamishwillee.gitbooks.io/ham_px4userguide/content/zh/

飞控型号
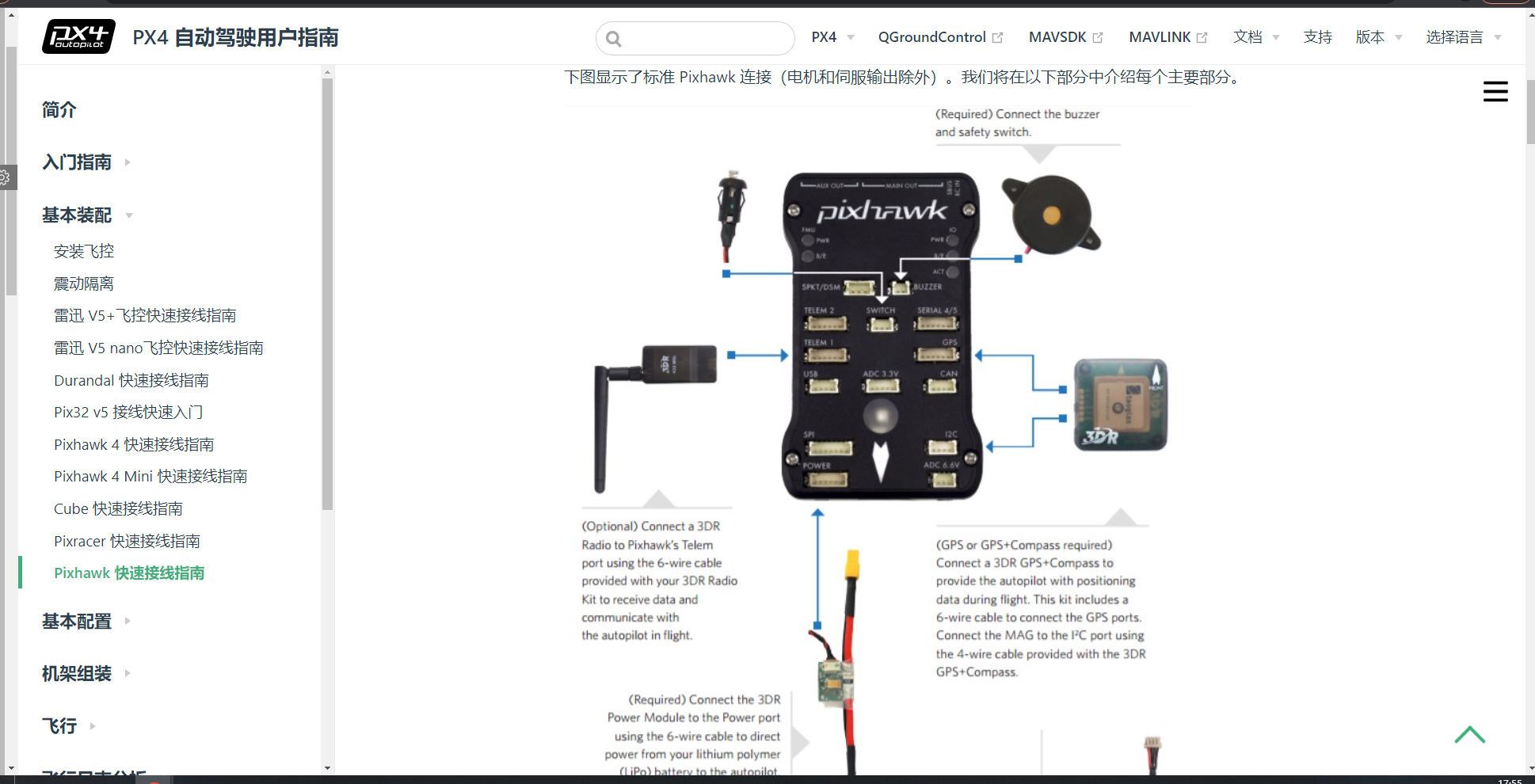
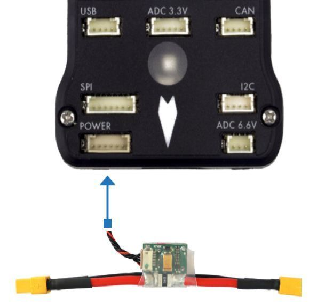
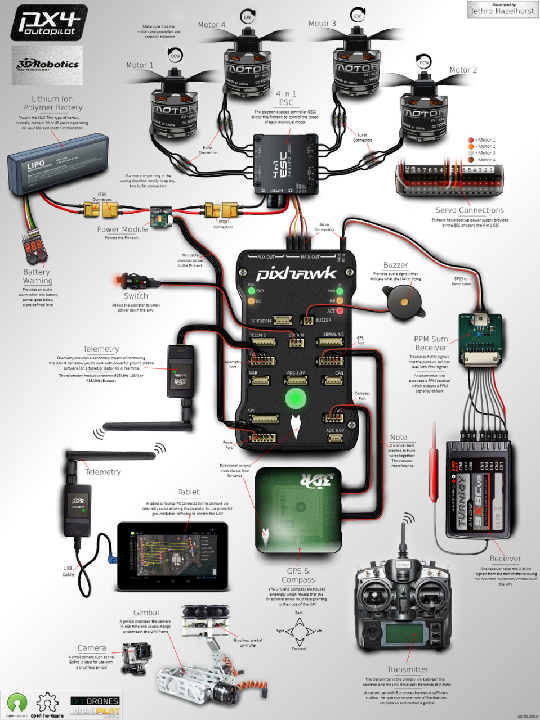
https://docs.px4.io/v1.12/zh/assembly/quick_start_pixhawk.html

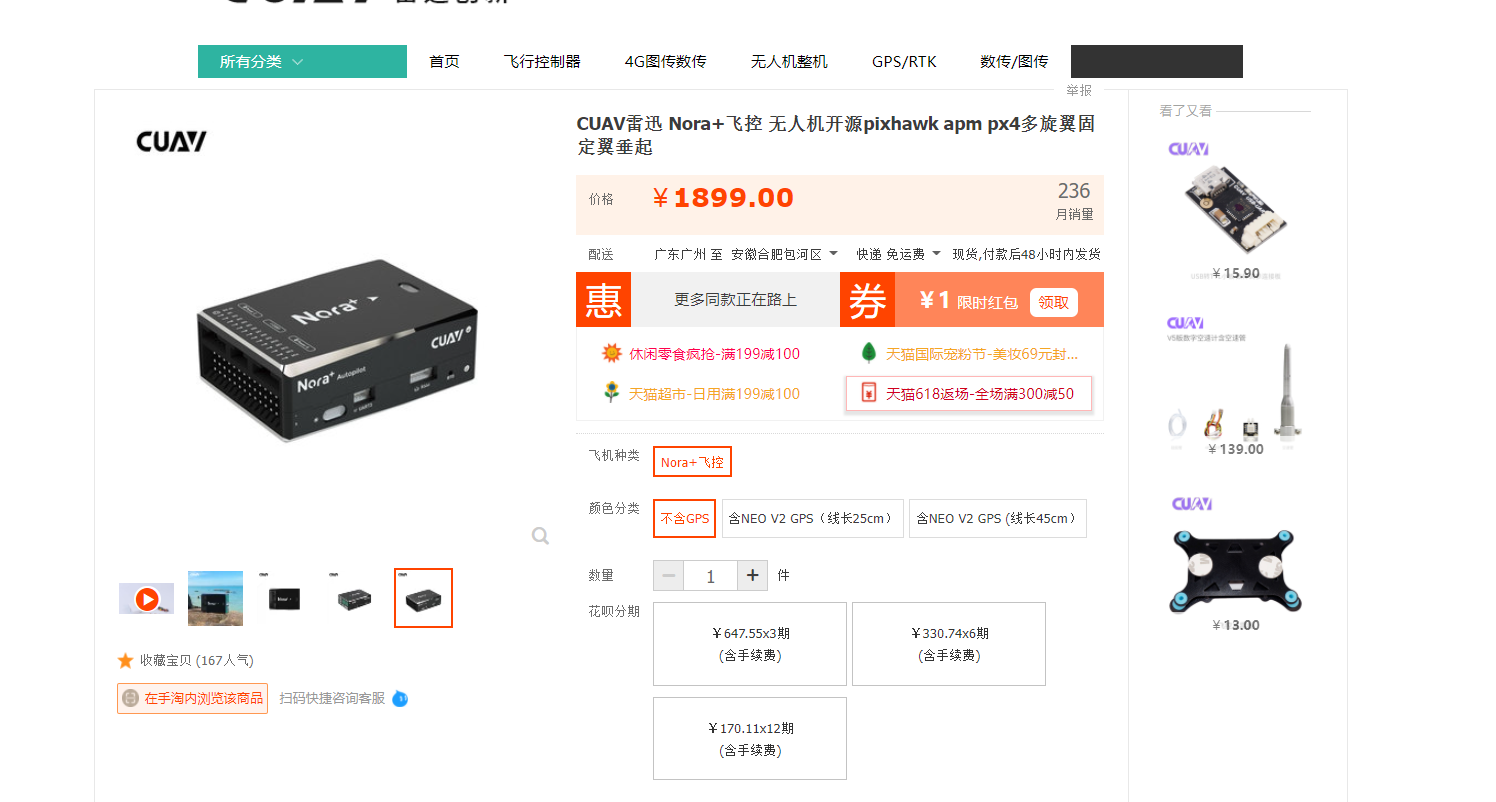
https://cuav.taobao.com/search.htm?spm=2013.1.0.0.24d4506ev0DMfw&search=y
https://item.taobao.com/item.htm?spm=a1z10.5-c.w4002-22188405087.10.1f0e1398LURAci&id=623331747909

https://docs.px4.io/v1.12/zh/assembly/quick_start_cuav_v5_plus.html
https://doc.cuav.net/flight-controller/v5-autopilot/zh-hans/v5+.html

https://item.taobao.com/item.htm?spm=a219r.lm0.14.28.6c5824e15DvkgN&id=598119065322&ns=1&abbucket=20#detail


https://doc.cuav.net/tutorial/copter/flight-modes/flowhold.html

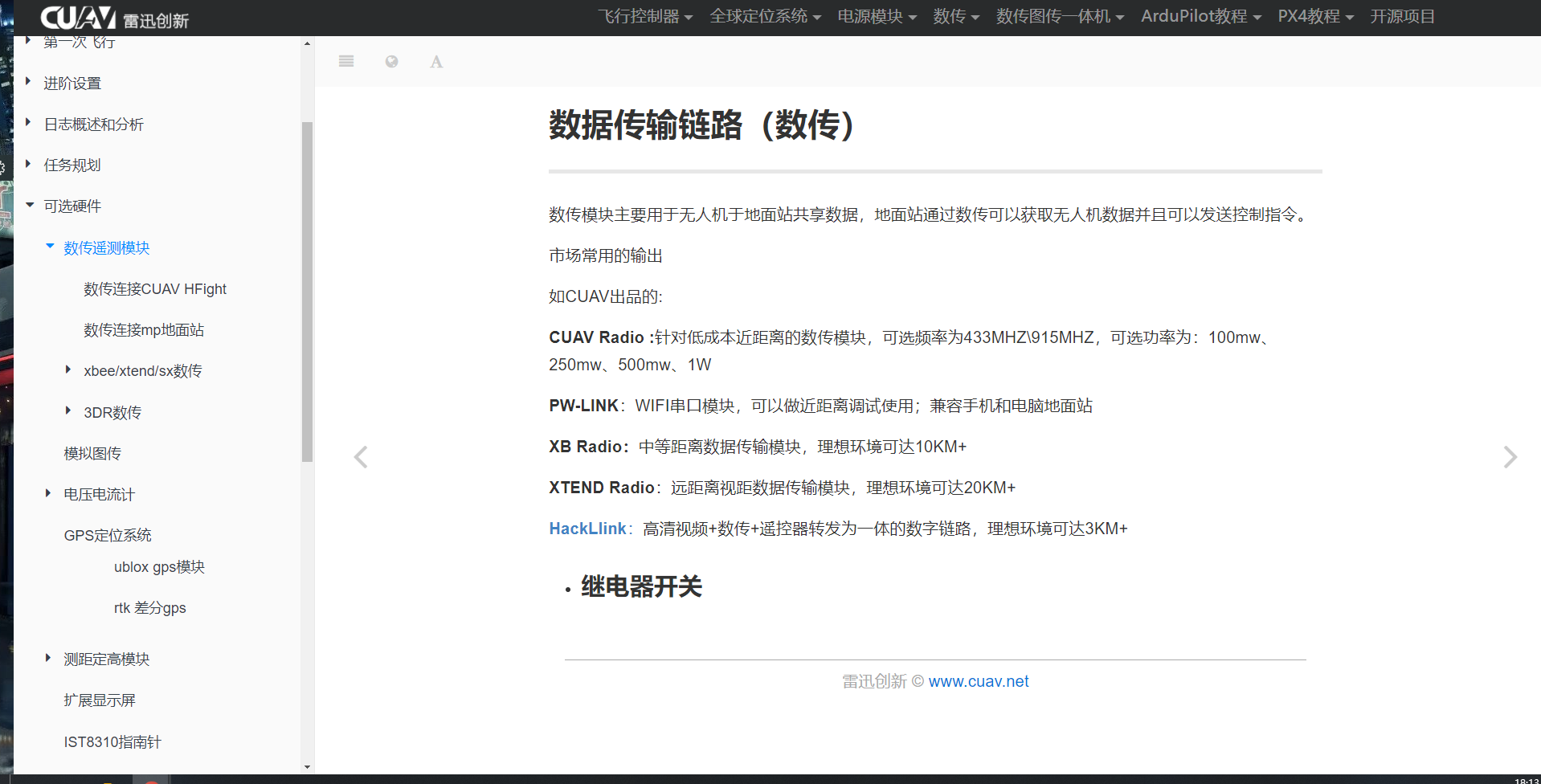
https://doc.cuav.net/tutorial/copter/optional-hardware/radio.html
主控HolyBro Pixhawk 4
https://item.taobao.com/item.htm?spm=a1z10.3-c.w4002-22188405082.9.1bc26405NEsoQy&id=618340579779
https://item.taobao.com/item.htm?spm=a230r.1.14.79.4ebc49b7ek0Chv&id=676492053692&ns=1&abbucket=20#detail

FMU处理器:STM32 F765 IO处理器:STM32 F100 加速度计:ICM-20699 陀螺仪:BMI055 磁力计:IST8310 气压计:MS5611 功率模块输出:4.9~5.5V USB电源输入:4.75~5.25V 重量:158g 尺寸:44*84*12mm 固件:PX4固件

Prometheus V1.0-stable 机载系统
系统:Ubuntu 18.04 用户名:amov 密码:amov Jetpack:32.4.3 Cuda:10.2 ROS:melodic opencv:3.3.1 realsense SDK:2.2.36 realsense ROS:2.2.15
机架 AmovLab JCV-450
重量(约):1550g(不含电池),1950g(含电池) 尺寸:335mm*335mm*230mm(长*宽*高) 对角电机轴距:410mm 最大有效载荷:1600g 最大起飞重量:3550g 最长飞行时间:测试环境(室外12°无风) (P450-NX-T265-单目≈1700g)最大悬停时间≈17min (P450-NX-T265-D435i-S1-单目≈1950g)最大悬停时间≈14min 室外13min39s;室内10min23s; 悬停精度:±1m(GPS下) 抗风等级:3-4级 工作环境:室内/室外 工作温度:6℃-40℃
激光雷达
蓝海光电 LDS-50C 型号:LDS-50C 激光测距技术:TOF 测量半径:0.15m~40m 采样速度:9200次/秒 测距精度:2~10cm(典型值5cm) 测距分辨率:1cm 扫描角度:360° 扫描频率:7~15Hz(典型值10Hz)
飞机如何对接机载电脑

ros Ubuntu18控制
https://docs.px4.io/v1.12/zh/ros/ros2_comm.html
python控制代码
https://docs.px4.io/v1.12/zh/robotics/dronekit.html
使用 DroneKit 与 PX4 通信

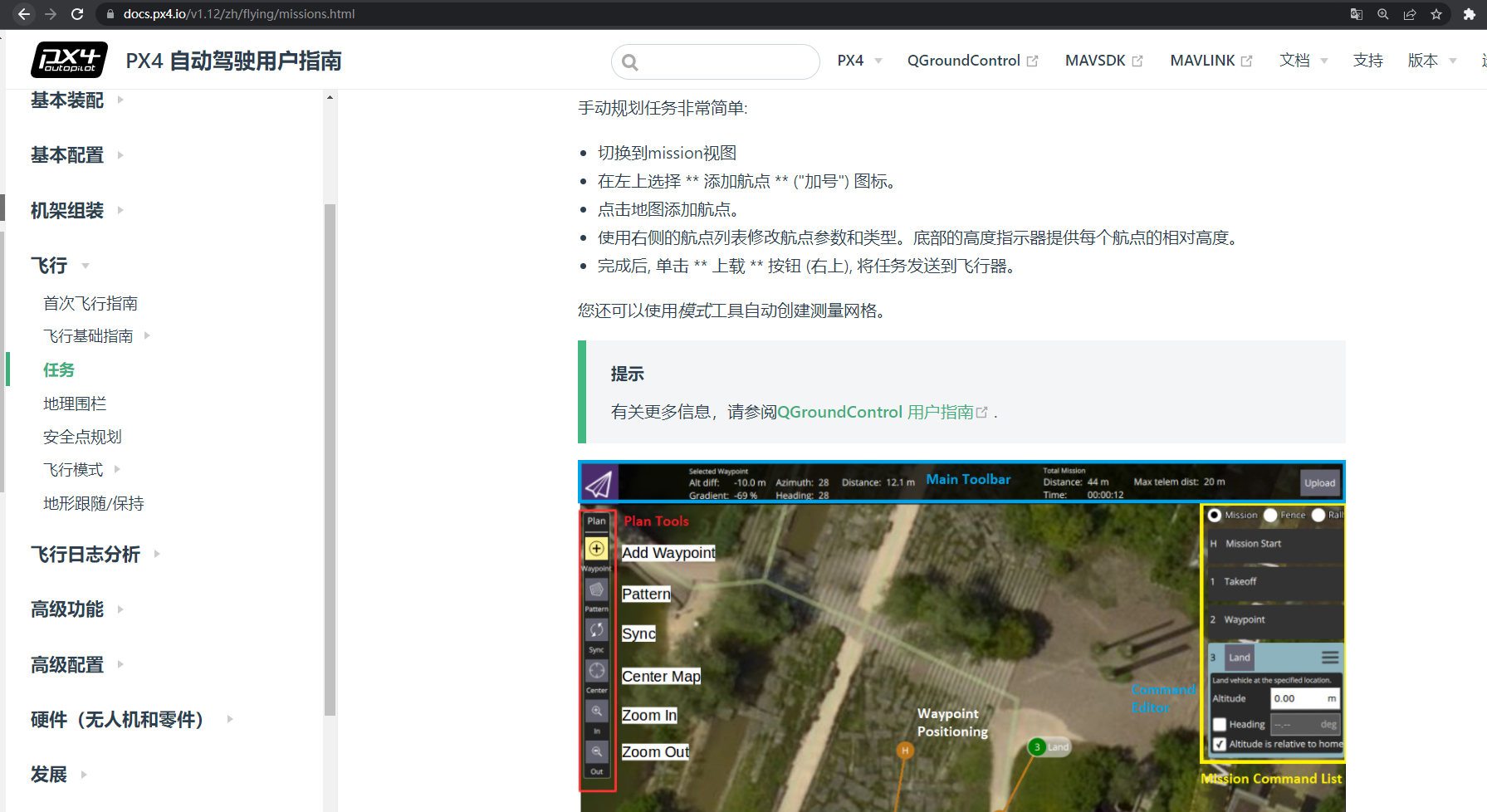
地图规划
https://docs.px4.io/v1.12/zh/flying/missions.html
光流传感器
PX4Flow光流传感器 受Pixhawk/APM支持的超声波传感器或激光雷达 (官方支持的传感器列表)
https://ardupilot.org/copter/docs/common-rangefinder-landingpage.html

朝下的测距仪自动用于具有高度控制的飞行模式,例如高度保持、停留和定位模式。来自传感器的数据将一直使用,直到您超过RNGFNDx_MAX_CM,然后切换到气压计。
https://docs.px4.io/v1.12/zh/sensor/px4flow.html
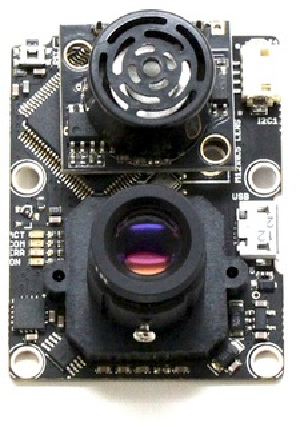
px4flow-bottom 一些选项包括: PX4Flow内置声纳测距传感器。 PMW3901 有着与光学鼠标非常相似的感应器. #传感器接线
https://item.taobao.com/item.htm?spm=a230r.1.14.18.4162422bHVdhQG&id=673344775517&ns=1&abbucket=20#detail



