
slam14(1) v1_3_1 四元数基本知识
0定义
https://zhuanlan.zhihu.com/p/38067368

1-0用四元数表示旋转

1-1 旋转矩阵R与旋转向量a的关系:
最后由带入正弦、余弦的泰勒展开式,可得到 Rodrigues等式:

也可以写成:

那么我们怎么由 呢,直接给出下面公式:
1-2 旋转向量a和四元数q关系

1-3 旋转矩阵和四元数关系

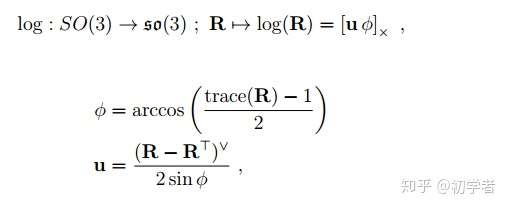
1-4旋转群与四元数的关系
纯四元数的指数形式为:

而对于单位四元素的定义:
所以可以简单理解为一个纯四元数的指数就等于一个单位四元数。对于三维空间的旋转向量 ,


四元数李群李代数的表格





一般性知识
https://www.qiujiawei.com/understanding-quaternions/
几何化展示含义
https://www.zhihu.com/question/23005815


四元数和旋转(Quaternion & rotation)
前提知识




https://zhuanlan.zhihu.com/p/78987582
定义


四元数的加减
和复数类似,四元数也可以被加减:

四元数的积
自己相乘= -1
其他轴反方向变换= -1










3.4 四元数表示旋转



转换中用到的基本转换

证明 思想
其中v为单位向量,左边叉乘的结果一定是与p和v共面的,且与v垂直的,因为平面和法向量是一一对应的。再看下图,证毕。




旋转向量转化为四元数
四元数转化为旋转向量

四元数连乘转换
3.5 四元数转换为旋转矩阵


四元数用于插值平滑
https://www.qiujiawei.com/understanding-quaternions/







除了特别难理解之外,相比矩阵或欧拉角,四元数在表示旋转这个事情上,拥有一些明显的优点。
-
SLERP和SQUAD,提供了一种使得在朝向之间可以平滑过渡的方法。
-
使用四元数来串联"旋转",要比使用矩阵快得多。
-
对于单位四元数,逆向旋转可以通过对向量部分取反来实现。而计算一个矩阵的逆矩阵是被认为比较慢的,如果这个矩阵未被标准正交化的话(标准正交矩阵的逆矩阵是它的转置矩阵)。
-
从四元数转换到矩阵,要比从欧拉角转换到矩阵快一点。
-
四元数只需要4个数字(如果旋转四元数已经单位化了那么只需要3个,实数部分可以在运行时计算)来表示一个旋转,而矩阵需要至少9个数字。
尽管使用四元数有这么多优点,还是有缺点存在的。
-
因为浮点数的舍入运算错误,四元数可能会变无效。不过,这个错误可以通过重新单位化四元数来避免。
-
使用四元数最具威慑性的地方,还是四元数的理解难度大。我希望这个问题可以通过阅读本文来解决。
存在一些已经实现了四元数、并且是正确的的数学程序库。在我的个人经验里,我发现GLM(OpenGL Math Library)是一个优秀的数学库,它的四元数的实现极其不错。如果你对在你的程序中使用四元数感兴趣,那么我会推荐你使用这个数学库。
https://www.cnblogs.com/21207-iHome/p/6952004.html
四元数插值与均值(姿态平滑)

四元数的球面线性插值(Slerp)




- 当p和q的夹角θ差非常小时会导致sinθ→0,这时除法可能会出现问题。为了避免这样的问题,当θ非常小时可以使用简单的线性插值代替(θ→0时,sinθ≈θ,因此方程退化为线性方程:slerp(p,q,t)=(1-t)p+tq)


 浙公网安备 33010602011771号
浙公网安备 33010602011771号