


旋转矩阵
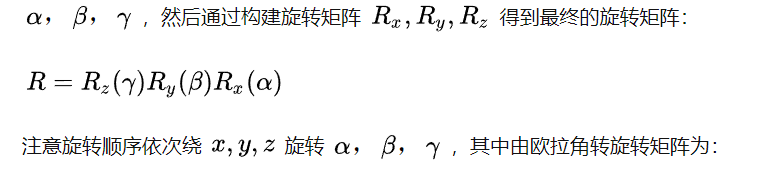
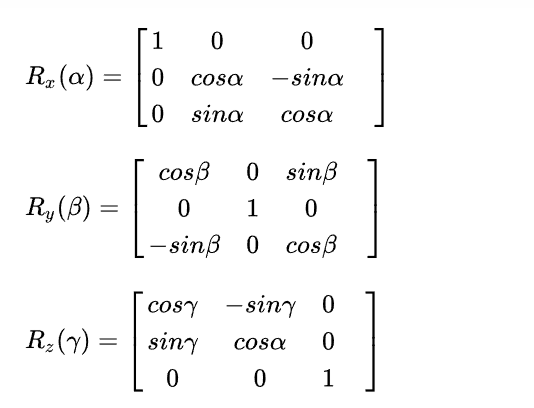
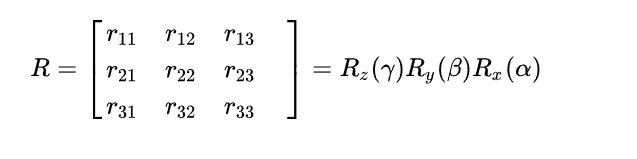
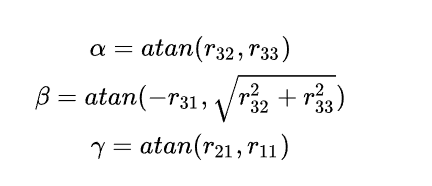
有旋转矩阵计算欧拉角的公式:
欧拉旋转比较好理解,我想实现一个旋转,只要依次绕三个轴转对应的角度就可以实现。但是用欧拉角来表示旋转有一个非常大的缺陷,也就是万向锁也叫万向节死锁的问题,简单的说就是一旦选择±90°作为pitch角,就会导致第一次旋转和第三次旋转等价,整个旋转表示系统被限制在只能绕竖直轴旋转,丢失了一个表示维度。这种角度为±90°的第二次旋转使得第一次和第三次旋转的旋转轴相同的现象,称作万向锁。所以在通常有关旋转的应用场景中基本不使用欧拉角来旋转,而使用四元数Quaternion因为四元数可以实现平滑插值。
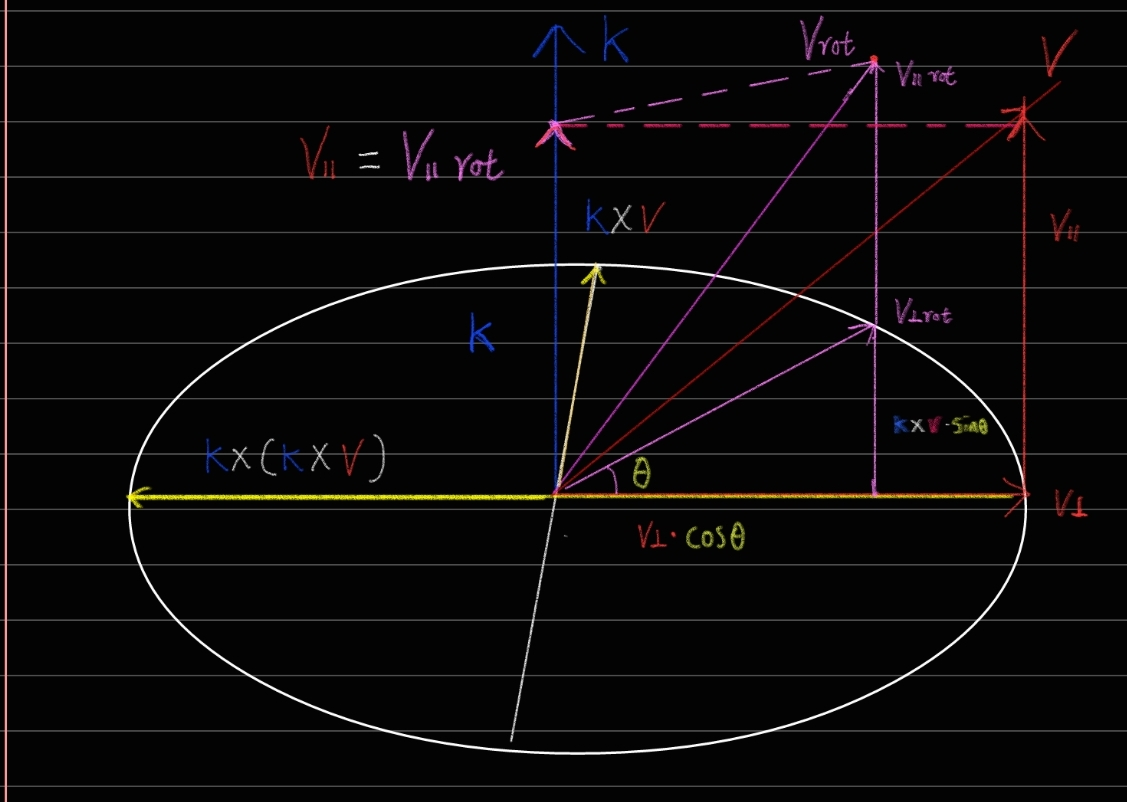
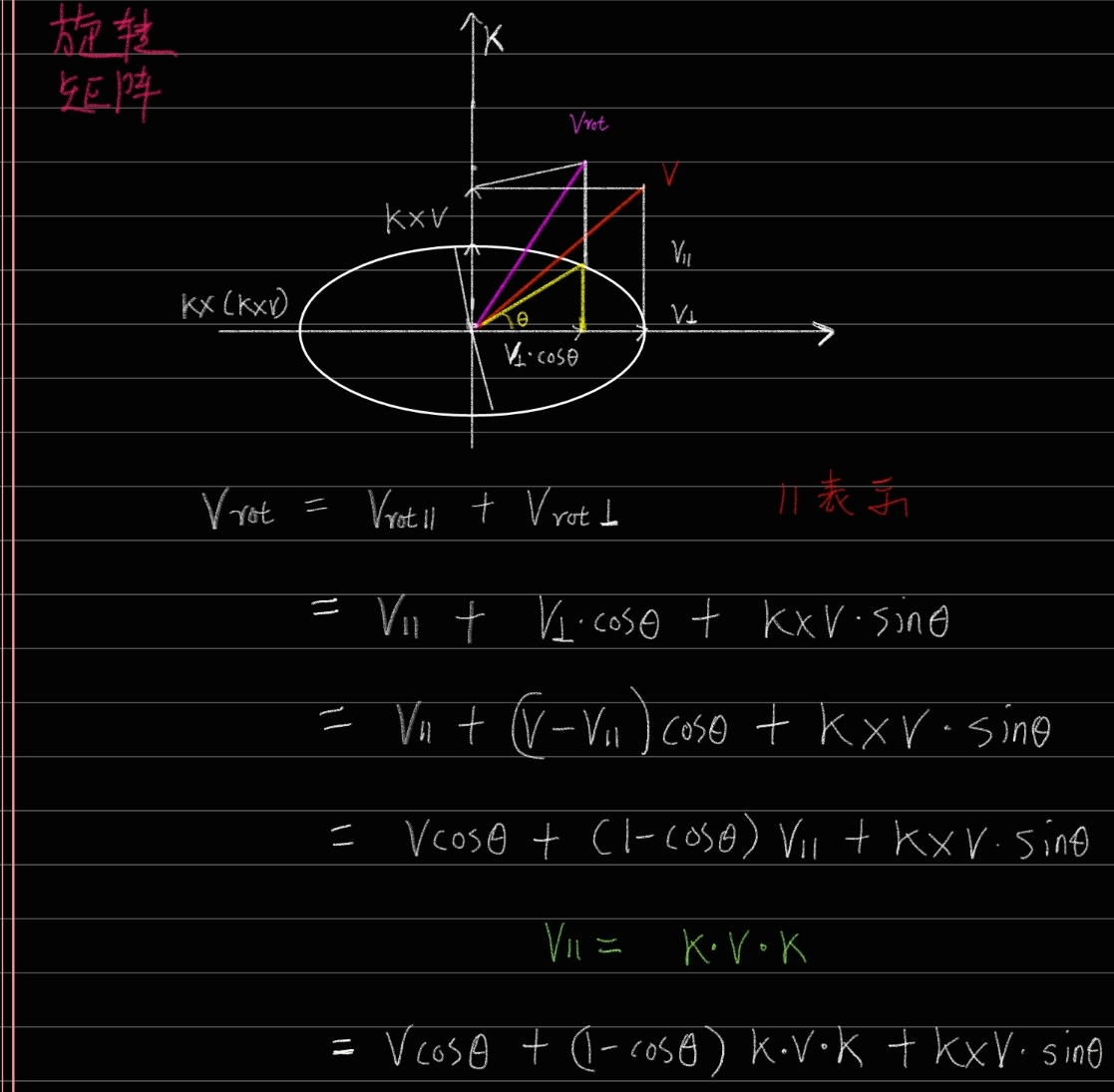
旋转矩阵【3*3】---旋转向量【3*1】和旋转角度
https://www.cnblogs.com/wtyuan/p/12324495.html

S
S
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 | static SE3Quat exp(const Vector6& update) { Vector3 omega; for (int i = 0; i < 3; i++) omega[i] = update[i]; Vector3 upsilon; for (int i = 0; i < 3; i++) upsilon[i] = update[i + 3]; double theta = omega.norm(); Matrix3 Omega = skew(omega); Matrix3 R; Matrix3 V; if (theta < cst(0.00001)) { Matrix3 Omega2 = Omega * Omega; R = (Matrix3::Identity() + Omega + cst(0.5) * Omega2); V = (Matrix3::Identity() + cst(0.5) * Omega + cst(1.) / cst(6.) * Omega2); } else { Matrix3 Omega2 = Omega * Omega; R = (Matrix3::Identity() + std::sin(theta) / theta * Omega + (1 - std::cos(theta)) / (theta * theta) * Omega2); V = (Matrix3::Identity() + (1 - std::cos(theta)) / (theta * theta) * Omega + (theta - std::sin(theta)) / (std::pow(theta, 3)) * Omega2); } return SE3Quat(Quaternion(R), V * upsilon);} |
如何利用旋转矩阵求解旋转角度



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 无需6万激活码!GitHub神秘组织3小时极速复刻Manus,手把手教你使用OpenManus搭建本
· C#/.NET/.NET Core优秀项目和框架2025年2月简报
· Manus爆火,是硬核还是营销?
· 一文读懂知识蒸馏
· 终于写完轮子一部分:tcp代理 了,记录一下