

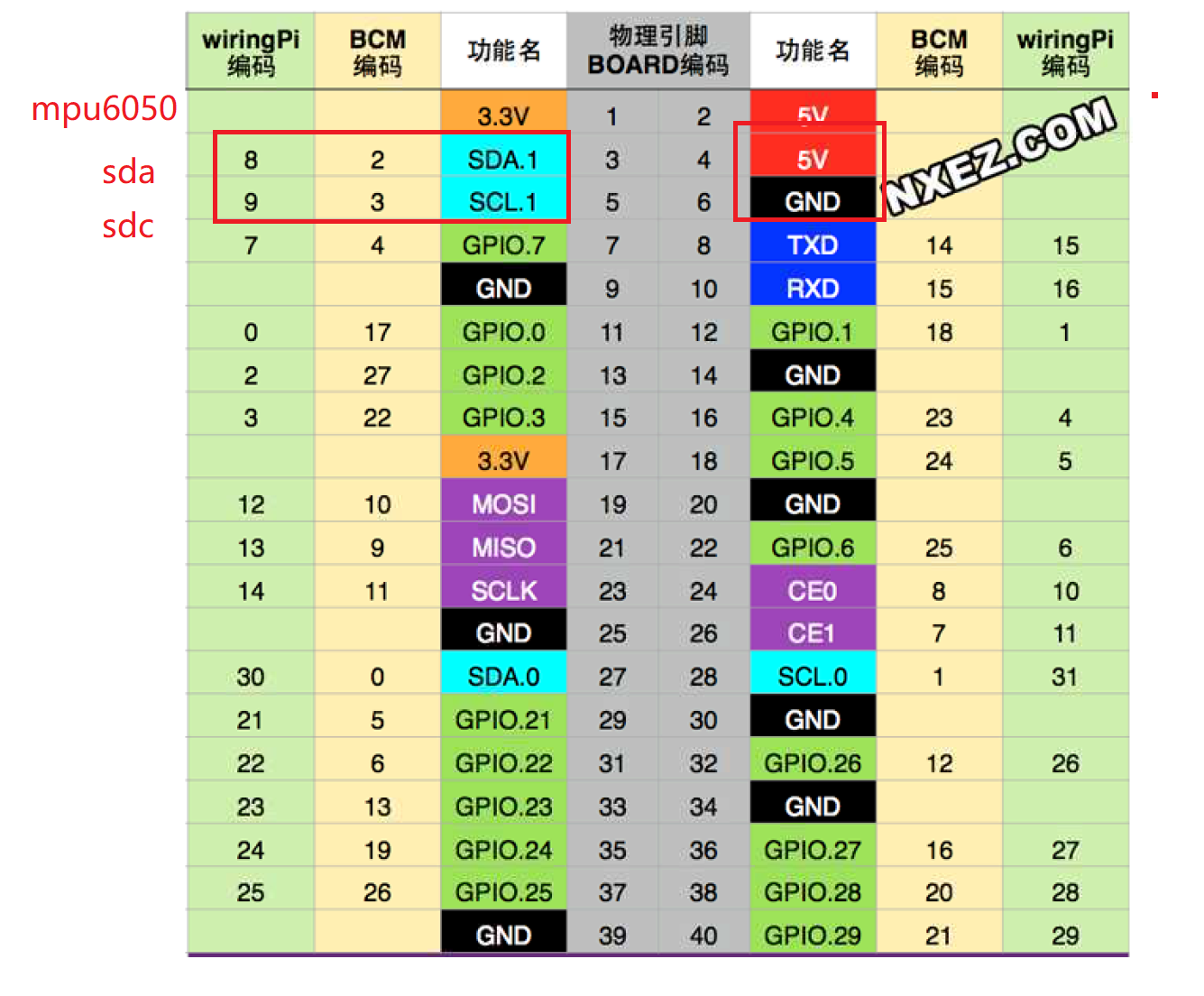
树莓派读取mpu6050内容
1 2 3 4 5 6 | sudo gedit /etc/modules //文件的最后写入 i2c-bcm2708 i2c-dev //保存退出 然后是可选的,把设备解除屏蔽,一块全新的板子可能是没有的。 |
接着去树莓派选项里面,把GPIO打开:
1 | sudo raspi-config |
这里有个选项回车进去会有I2C的选项,再回车选择OK就行了,之后重启树莓派
1 | sudo reboot |
之后让树莓派联网状态下运行
1 | sudo apt-get install i2c-tools //可能你的已经安装了,运行一遍总没错。 |
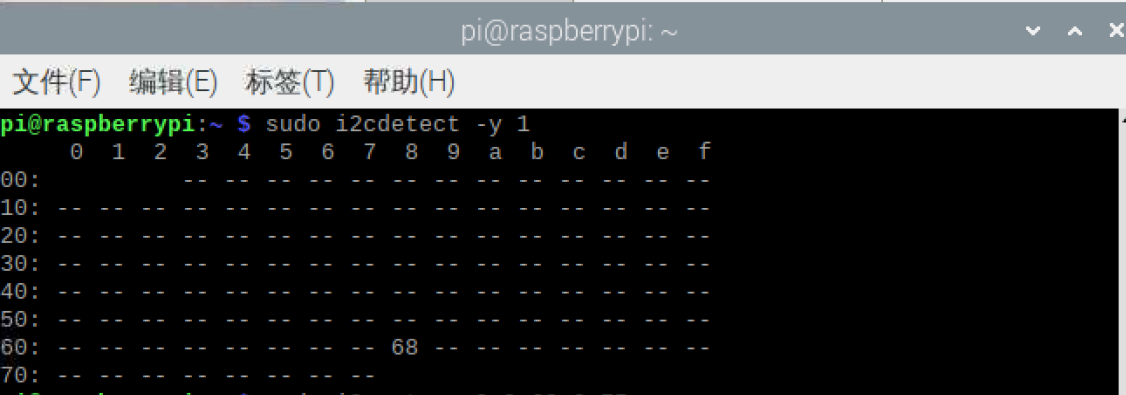
链接设备
1 | sudo i2cdetect -y 1 //这里有点忘记了,也可能是0,最后出来这个就对了 |
然后代码如图所示:(首先要安装 mpu6050-raspberrypi模块)
1 | pip install mpu6050-raspberrypi |
样例1
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 | from mpu6050 import mpu6050from time import sleepsensor = mpu6050(0x68)while True: accel_data = sensor.get_accel_data() gyro_data = sensor.get_gyro_data() temp = sensor.get_temp() print("Accelerometer data") print("x: " + str(accel_data['x'])) print("y: " + str(accel_data['y'])) print("z: " + str(accel_data['z'])) print("Gyroscope data") print("x: " + str(gyro_data['x'])) print("y: " + str(gyro_data['y'])) print("z: " + str(gyro_data['z'])) print("Temp: " + str(temp) + " C") sleep(0.5) |
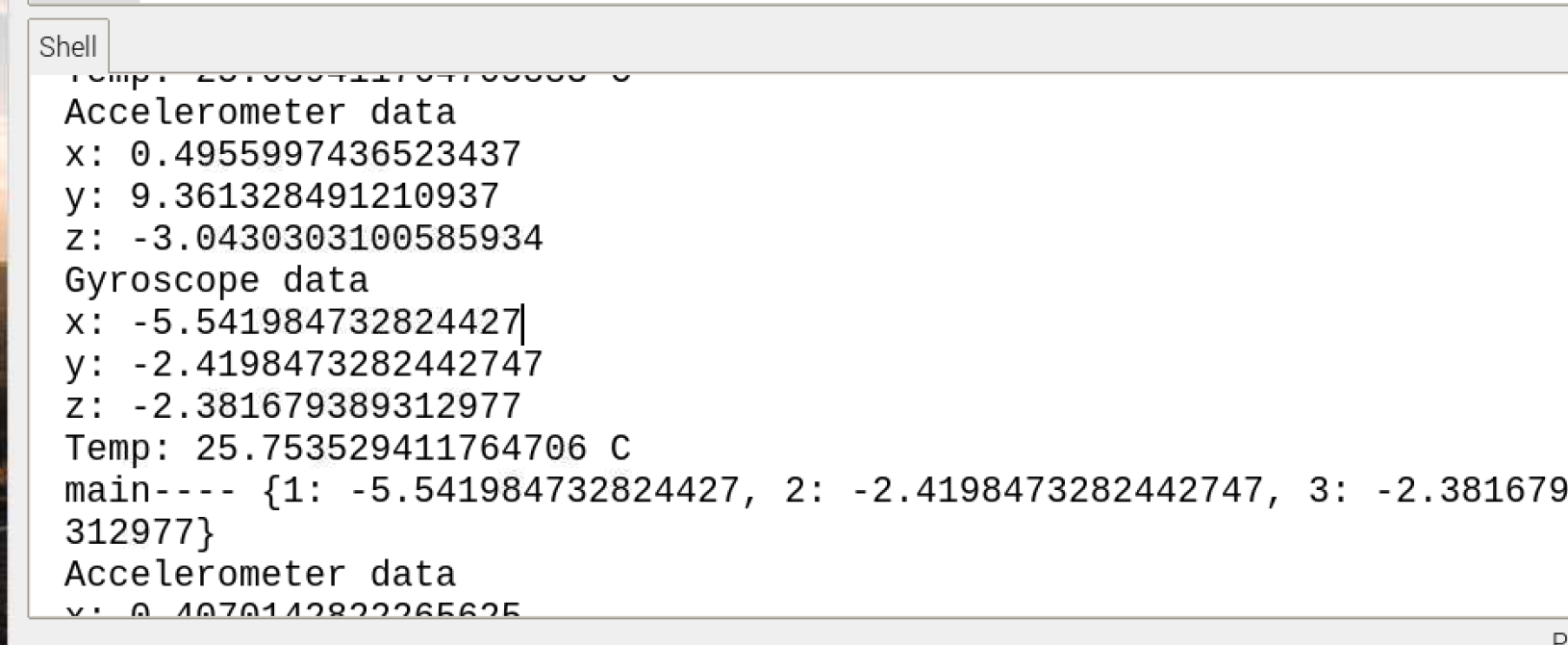
样例2 单独开一个进程
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 | #!/usr/bin/python# -*- coding: utf-8 -*-import timefrom multiprocessing import Process,Manager from mpu6050 import mpu6050from time import sleepprint_debug=1def mpuProcess(ShareImages,lock): sensor = mpu6050(0x68) while True: accel_data = sensor.get_accel_data() gyro_data = sensor.get_gyro_data() temp = sensor.get_temp() if print_debug==1:print("Accelerometer data") if print_debug==1:print("x: " + str(accel_data['x'])) if print_debug==1:print("y: " + str(accel_data['y'])) if print_debug==1:print("z: " + str(accel_data['z'])) if print_debug==1:print("Gyroscope data") if print_debug==1:print("x: " + str(gyro_data['x'])) if print_debug==1:print("y: " + str(gyro_data['y'])) if print_debug==1:print("z: " + str(gyro_data['z'])) ShareImages[1]=gyro_data['x'] ShareImages[2]=gyro_data['y'] ShareImages[3]=gyro_data['z'] if print_debug==1:print("Temp: " + str(temp) + " C") sleep(0.5) if __name__ == '__main__': lock = Manager().Lock()#创建共享内存容器 ShareImages=Manager().dict()#存str类型数据 ShareImages[1]=1.0# ShareImages[2]=1.0# ShareImages[3]=1.0# p = Process(target=mpuProcess, args=(ShareImages,lock))#开启进程 p.deamon=True #伴随主进程关闭而关闭,但是有时候还是关闭不了,单独搞个标志位来控制 p.start()#开始 while True: print("main----",ShareImages) time.sleep(1) |
样例3 使用mpu测算速度



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律