
(最终版)linux下python和c++相互调用共享内存通信
本文主要用于python和c++相互通信,通过共享内存相互传递数据,图像,数组,结构体。
python优势在于开发快速方便,有很多扩展库可用,且深度学习很多都是python写的。
c++底层速度快,但是开发慢,尤其是很多SLAM和图像处理的只有c++版本。
为了调试开发方便,有时候需要嫁接两个工程,根据自己实际需要决定。
大概思路
1 c++编译动态库完成各种共享内存的实际操作。
2 python端调用c++动态库进行共享内存数据交互。
3 c++端调用c++动态库进行共享内存数据交互。
主要用的的是ctypes
资料
https://blog.csdn.net/koibiki/article/details/89478458
https://docs.python.org/3/library/ctypes.html
共享内存
在 Linux 实现内存共享的函数主要有 shmget、shmat、shmdt、shmctl 这么四个。
1、shmget 得到或者创建 一个共享内存对象
int shmget(key_t key, size_t size, int shmflg) 其中 key_t key 的值为一个IPC键值,可以通过IPC_PRIVATE 建立一个新的键值为0的共享对象 ,但这并不能保证与IPC对象的对应关系,不同进程之间需要同一个且不会重复的IPC键值来完成通信,一般此参数使用ftok函数来进行创建IPC键值。
size_t size 是映射共享内存的大小,单位为字节 (Byte),但在创建时这里的最小分配单位是一页,大致为4KB,当你超过4KB但是小于8KB时会主动分配两页,也就是不足一页(4KB)的按照一页计算。
int shmflg 参数是需要注明的操作模式。
- 0:取键值对应的共享内存,若此键值相应的共享内存不存在就报错。
- IPC_CREAT:存在与键值对应的共享内存则返回标识符,若不存在则创建共享内存返回标识符。
- IPC_CREAT|IPC_EXCL:不存在相应键值的共享内存则创建此共享内存,若存在则报错
返回值:成功返回共享内存的标识符,失败返回-1。
2、shmat 获得共享内存的地址(与进程建立映射)
void *shmat(int shmid, const void *shmaddr, int shmflg)int shmid 接收一个共享内存标识符参数,通常由 shmget 返回。
const void *shmaddr 共享内存地址映射到进程哪块内存地址,若设 NULL 则让内核决定。
int shmflg 选择操作模式,设 SHM_RDONLY 为只读共享内存,其他或0为可读写。
返回值:成功返回映射完成的内存地址,失败返回-1。
3、shmdt 与进程断开映射关系
int shmdt(const void *shmaddr)const void *shmaddr 在进程中用于映射内存地址的指针。
返回值:成功返回0,失败返回-1。
4、shmctl 管理共享内存(释放共享内存)
int shmctl(int shmid, int cmd, struct shmid_ds *buf)int shmid 接收一个共享内存标识符参数,通常由 shmget 返回。
int cmd 是需要注明的操作模式。
- IPC_STAT:获取共享内存状态,将共享内存的 shmid_ds 信息拷贝到 shmid_ds *buf 中。
- IPC_SET:更改共享内存状态,将 shmid_ds *buf 所指内容拷贝到共享内存 shmid_ds 中。
- IPC_RMID:删除释放这块共享内存。
struct shmid_ds *buf 内存管理结构体,这个结构在 shm.h 中定义,网上能查到信息。
返回值:成功返回0,失败返回-1。
简单实例
#include <stdio.h>
#include <string.h>
//共享内存
#include <sys/shm.h>
//挂起进程
#include <unistd.h>
int main(void)
{
//分配内存标志
int segment_id;
//要映射的地址
char* text;
//共享内存结构
struct shmid_ds shmbuffer;
//创建共享内存
segment_id = shmget((key_t)1234567, 1, IPC_CREAT);
//映射共享地址
text = (char*)shmat(segment_id, NULL, 0);
while (1)
{
//映射共享地址
//text = (char*)shmat(segment_id, NULL, 0); //断开映射前,不能重复映射否则内存泄露
//拷入共享地址
memcpy(text, "A", 2);
//10000微妙,10毫秒
usleep(10000);
//输出当前共享内存区域地址
printf("%s\n", text);
}
//断开映射
shmdt(text);
//释放共享内存块
shmctl(segment_id, IPC_RMID, 0);
return 0;
}
问题注意
共享内存使用完,例如每次更新一张图像后.
1每次程序要映射同一个地址的时候,要断开先前的映射,不然在映射的时候会认为地址被占用,重新随机映射分配新地址,造成共享内存不停的再增大.
shmdt("名字");2最后是用完要释放共享内存
shmctl(segment_id, IPC_RMID, 0);
3 使用 shmget -> shmat -> shmctl 这样一个流程就能描述一个内存从创建到销毁的过程。
(创建)->(映射)-> (断开映射)->(销毁)
测试环境
ubuntu18.05
联想笔记本
工程

1编译
cd bulid
删除清空
cmake ..
make
生成
c++ 发送测试端 send
c++ 接收测试端 client
c++ python和c++的交互动态库 libpython2share.so

同时python的测试样例

python的发送端 py_send.py
python的接收端 py_client.py
2测试样例
测试数据: 共享内存
-1图像1920*1080
-2 gps数组(经度 维度 高度 时间戳)
-3 gps结构体(标志位 字符串说明 经度 维度 高度 时间戳)

2-1 c++ 发送,c++接收
2-2 c++发送,pytho接受

2-3 python发送,c++接受
2-3 python发送,python接收
(如果是单纯的pyton接受,python有自己的共享内存机制,更好用)
参考整理 python共享内存 https://www.cnblogs.com/gooutlook/p/12262304.html


3其他说明
3-1 while不要出现空循环(什么也不做),容易导致一个进程占用cpu,导致其他进程无法获取cpu控制权,无法修改共享内存数据,造成假死状态。在while中加入sleep(0.001)操作。
虽然是多核CPU,从道理上来说不应出现这种问题,但是各种程序测试都是类似问题。
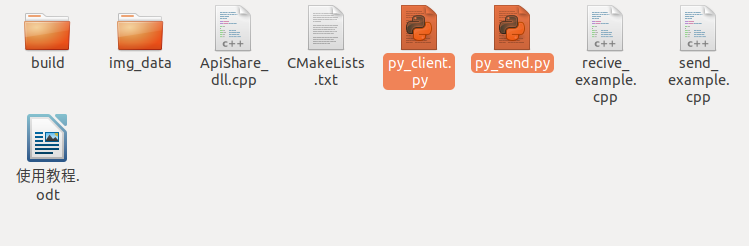
4代码结构
CMakeLists.txt
# cmake needs this line
cmake_minimum_required(VERSION 3.1)
# Define project name
project(opencv_example_project)
find_package(OpenCV REQUIRED)
message(STATUS "OpenCV library status:")
message(STATUS " version: ${OpenCV_VERSION}")
message(STATUS " libraries: ${OpenCV_LIBS}")
message(STATUS " include path: ${OpenCV_INCLUDE_DIRS}")
# Declare the executable target built from your sources
add_library(python2share SHARED ApiShare_dll.cpp)
#add_executable(send send_example.cpp ApiShare_dll.cpp)
#add_executable(client recive_example.cpp ApiShare.cpp)
add_executable(send send_example.cpp)
add_executable(client recive_example.cpp)
# Link your application with OpenCV libraries
target_link_libraries(send ${OpenCV_LIBS} )
target_link_libraries(client ${OpenCV_LIBS} )
target_link_libraries(python2share ${OpenCV_LIBS})
C++动态库
ApiShare_dll.cpp
使用前修改以下数据:
1 图像分辨率 默认1920*1080
#define IMAGE_W 1920 //图像宽 #define IMAGE_H 1080 //图像高 #define IMAGE_SIZE IMAGE_W*IMAGE_H*3 //图片像素总大小 3通道彩色
2 共享内存标识,默认一个共享内存地址,未来如果开启多个地址同可修改这个
#define Shm_addrees 1203 //共享内存地址标识
3 共享内存数据结构,未来根据自己需要修改
//共享内存-图像
typedef struct ShareData
{
int flag;
int rows;//图像高
int cols;//图像宽
char imgdata[IMAGE_SIZE];//图像数据一维数据,之前用了cv::Mat不行,因为无法在结构体里初始化大小
float Gps[4];//保存gps信息 经纬高时间戳
}ShareData_;
4 共享内存图像格式默认是char,其中类中图像变量cvoutImg 是用来暂存一个mat类型图像,便于直接访问无需转化才能访问。根据不同的数据修改图像类型
cv::Mat cvoutImg = cv::Mat(IMAGE_H,IMAGE_W,CV_8UC3,cv::Scalar(255, 255, 255));//bufHight,bufWidthl
例如 zed双目相机出来的图格式是CV_8UC4而不是文件中默认的CV_8UC3。所以就要改成
cv::Mat cvoutImg = cv::Mat(IMAGE_H,IMAGE_W,CV_8UC4,cv::Scalar(255, 255, 255));//bufHight,bufWidthl
ApiShare_dll.cpp 完整代码
#ifndef SHARE
#define SHARE
#include <stdio.h>
#include <string.h>
#include <unistd.h>
#include <stdlib.h>
#include <sys/shm.h>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
#include <vector>
#include <string>
using namespace std;
using namespace cv;
//修改共享内存数据
#define IMAGE_W 5472 //图像宽
#define IMAGE_H 3648 //图像高
#define IMAGE_TYPE CV_8UC3 // CV_8UC1 灰度图 CV_8UC3 3通道图像
#define IMAGE_SIZE IMAGE_W*IMAGE_H*3 //图片像素总大小 CV_8UC1--1通道 CV_8UC3--3通道彩色
#define Shm_addrees 1209 //共享内存地址标识
// 所有的返回函数必须有返回值 不然调用报错
namespace MyShare{
//共享内存-图像
typedef struct ShareData
{
int flag;
int rows;//图像高
int cols;//图像宽
char imgdata[IMAGE_SIZE];//图像数据一维数据,之前用了cv::Mat不行,因为无法在结构体里初始化大小
float Gps[4];//保存gps信息 经纬高时间戳
}ShareData_;
// 非共享内存-传送gps混合数据
typedef struct StructGpsData {
int flag;
char *msg;
float longitude;
float latitude;
float high;
float time;
} ;
class Share_class
{
//变量定义
public:
//1创建共享内存
int shmid = shmget((key_t)Shm_addrees, sizeof(ShareData), 0666|IPC_CREAT);
//2映射共享内存地址 shm指针记录了起始地址
void *shm = shmat(shmid, (void*)0, 0);//如果创建一个函数每次调用都执行,需要执行完释放一下shmdt
//printf("共享内存地址 : %p\n", (int *)(shm));
//2-1以ShareData结构体类型-访问共享内存
ShareData *pShareData= (ShareData*)shm;
//用来保存转化后的共享内存的图像结果
cv::Mat cvoutImg = cv::Mat(IMAGE_H,IMAGE_W,IMAGE_TYPE,cv::Scalar(255, 255, 255));//bufHight,bufWidth
//未来加速 可以搞一个图像队列 队列大小3 不停存图,然后挨着丢进共享内存,满了就清除。
//函数定义
public:
//1初始化执行
Share_class(){
printf("共享内存地址 : %p\n", (int *)(shm));
//存图要先把图像标志位初始给0,这里给会导致接收端调用开启的时候再次给0覆盖了1导致取图失败。
}//1构造函数
//0销毁执行
~Share_class() {
cout<<"析构函数执行"<<endl;
DestroyShare();
} //0结束销毁函数
//3销毁共享内存
int DestroyShare(){
//4断开映射 ,保证下次访问不被占用
shmdt(shm);
//5释放共享内存地址
shmctl(shmid, IPC_RMID, 0);
cout<<"共享内存已经销毁"<<endl;
return 1;
}
/*
函数功能: c++-》c++库-》共享内存
c++ 模式调用,
c++ 发送图像一张到共享内存 ,
修改图像标志位1,允许c++和pythoN调用接收函数接受图像。
函数输入:
cv::Mat Img 要发送的图像
函数输出:
pShareData->flag = 1; 图像标志位
Mat cvoutImg 该类图像变量
*/
int Send_pic2_share_once(cv::Mat Img){
int i = 0;
if(pShareData->flag == 0)
{
//cv::Mat Img=cv::imread("../data_img/1.jpg",cv::IMREAD_COLOR);
if(Img.data== nullptr)//nullptr是c++11新出现的空指针常量
{
printf("图片文件不存在\n");
return 0;
}
else{
// printf("图片文件存在\n");
}
//3-1共享内存保存图像宽和高
pShareData->rows =Img.rows;
pShareData->cols = Img.cols;
//3-2共享内存保存图像数据
int size = Img.cols * Img.rows * Img.channels();
char *cvoutImg = (char*)Img.data;
memcpy(pShareData->imgdata, cvoutImg, size);
//3-3共享内存保存标志位
pShareData->flag = 1;
return 1;
}
else{
return 0;
}
//getchar();
}
/*
函数功能:python 或 c++-》c++库-》共享内存
python 和 c++ 都可调用
c++ 或python 发送图像一张到共享内存 ,
修改图像标志位1,允许c++和pythoN调用接收函数接受图像。
如果是python模式通过c++库调用,可开启图像展示验证图像是否完整
函数输入:
uchar *frame_data, 要发送图像的图像数据 Mat img.data
int height, 图像高
int width 图像宽
函数输出:
pShareData->flag = 1; 图像标志位
Mat cvoutImg 该类图像变量
*/
int pySend_pic2_share_once(uchar *frame_data, int height, int width){
if(pShareData->flag == 0)
{
//assert(height*width*3<=IMAGE_SIZE);
if(frame_data== nullptr)//nullptr是c++11新出现的空指针常量
{
printf("图片文件不存在\n");
return 0;
}
else{
// printf("图片文件存在\n");
}
pShareData->cols=width;
pShareData->rows=height;
int size = height*width*3;
memcpy(pShareData->imgdata, frame_data, size);
//3-3共享内存保存标志位
pShareData->flag = 1;
//printf("数据保存成功 %d\n",pShareData->flag);
/*
//python模式下用来验证发送的图像是否完整。 python-》c++库-》共享内存
int showimg=0; //如果要显示 打开设置1
if(!showimg) return 0;
int channel=3;
cv::Mat image(height, width, CV_8UC3);
for (int row = 0; row < height; row++) {
uchar *pxvec = image.ptr<uchar>(row);
for (int col = 0; col < width; col++) {
for (int c = 0; c < channel; c++) {
pxvec[col * channel + c] = frame_data[row * width * channel + channel * col + c];
}
}
}
cv::imshow("image", image);
cv::waitKey(3);
*/
return 1;
}
else{
return 0;
}
}
/*
函数功能: 共享内存 -> c++库-> c++
C++ 调用
C++从共享内存读取一张图片
修改图像标志位0,允许发送端往共享内存存图。
函数输入:
函数输出:
pShareData->flag = 0; 图像标志位
Mat cvoutImg 该类图像变量
*/
int Rec_pic2_data_once()
{ //cv::Mat &cvoutImg_in
//3-1共享内存读取标志位
if(pShareData->flag == 1)
{
//3-2从共享内存获取图像高和宽
int IMAGE_h=pShareData->rows;//从共享内存获取图像高
int IMAGE_w=pShareData->cols;//从共享内存获取图像宽
//3-3共享内存读取图像数据
//cv::Mat cvoutImg = cv::Mat(IMAGE_h,IMAGE_w,CV_8UC3,cv::Scalar(255, 255, 255));//bufHight,bufWidth
int size = cvoutImg.cols * cvoutImg.rows * cvoutImg.channels();
memcpy((char*)cvoutImg.data, pShareData->imgdata,size);
//cv::imshow("RecData_Show",cvoutImg);
//cv::waitKey(1);
// printf("数据跟新一次\n");
//3-4共享内存修改标志位
pShareData->flag = 0;
return 1;
}
else{
return 0;
}
}
/*
函数功能: 共享内存 -> c++库-> python 或 c++
python 调用(C++用Rec_pic2_data_once) 主要是给python用获取共享内存的图像
python从共享内存读取一张图片
修改图像标志位0,允许发送端往共享内存存图。
函数输入:
调用前先用c++端更新共享内存最新的图像
函数输出:
pShareData->flag = 0; 图像标志位
(uchar*)cvoutImg.data 该类图像变量cvoutImg的数据data指针
*/
uchar* Img_Cgg2py(){ //uchar* frame_data, int rows, int cols, int channels
//将共享内存现有的图像数据发送
if(pShareData->flag == 1){
// cvoutImg=cv::imread("/home/dongdong/3Code/python2c/1/c++2c++/v4_c++_class_python/img_data/00001.jpg");
if(cvoutImg.data== nullptr)//nullptr是c++11新出现的空指针常量
{
printf("图片文件不存在\n");
return 0;
}
else{
// printf("图片文件存在\n");
}
//pShareData->flag = 0; //等python完成数组转化到图像,在python端完成标志位0
return (uchar*)pShareData->imgdata;//这里只试穿了一个数组,瞬间完成
// pShareData->flag = 0; //等python完成数组转化到图像,在python端完成标志位0
}
//重新建立新的数据发送模式
/*
Mat image =cv::imread("/home/dongdong/3Code/python2c/1/c++2c++/v4_c++_class_python/img_data/00001.jpg");
if (!image.empty()) {
//cout<< "cgg2py new pic"<<endl;
//cv::imshow("cgg", image);
//cv::waitKey(0);
int rows = image.rows;
int cols = image.cols;
int channels = image.channels();
// printf("rows = %d cols = %d channels = %d size = %d\n", rows, cols, channels, rows*cols*channels);
uchar *data = (uchar*)malloc(sizeof(uchar) * rows * cols * channels);
memcpy(data, image.data, rows * cols * channels);
return data;
}
*/
}
/*
函数功能: 共享内存 -> c++库-> python 或 c++
python 调用(C++直接通过类变量引用) 主要是给python通过函数方式用获取共享内存的int flag数据
获取图像标志位,用于判断是否可以读写
函数输入:
函数输出:
pShareData->flag = 0 or 1; 图像标志位
*/
//4-1获取图像保存标志位
int Get_ImgFlag(){
return pShareData->flag ;
}
/*
函数功能: 共享内存 -> c++库-> python 或 c++
python 调用(C++直接通过类变量引用) 主要是给python通过函数方式用修改共享内存的int flag数据
设置图像标志位,用于开启是否可以读写
函数输入:
int value pythoN需要将数据转化为 ctypes.c_int 送进来 默认int不需要
函数输出:
pShareData->flag = 0 or 1; 图像标志位 pythoN需要将数据转化为 ctypes.c_int 接受 默认int不需要
*/
int Set_ImgFalg(int value){
pShareData->flag =value;
}
/*
函数功能: python send -> c++库 -> 共享内存 -> c++库-> python rec
python 调用 (c++端直接通过类的变量引用就可以)
python 修改共享内存中的gps数据
函数输入:
float *data python的数组索引 和 类型
int len python的数组长度
函数输出:
float result 操作结果 可不使用(python接收端需要指明接收数据类型 c float指针 ctypes.POINTER(ctypes.c_float) )
*/
//5传输数组 接受py数组并修改python原数组,返回总和结果
float pyarr_set_cgg_gps_share(float *data, int len) {
float result=1;
for (int i = 0; i < len; i++) {
pShareData->Gps[i]=data[i] ;
}
return result;
}
/*
函数功能: python -> c++库 -> 共享内存 -> c++库-> python
python 调用 (c++端直接通过类的变量引用就可以)
python 获取共享内存中的gps数据
函数输入:
float pShareData->Gps[4] C++ 共享内存结构体pShareData中的GPS数据
函数输出:
(uchar*) pShareData->Gps; (python接收端需要指明接收数据类型 c float指针 ctypes.POINTER(ctypes.c_float) )
*/
uchar* py_get_cgg_gps_share(){
// c++发送端调用其他函数更新GPS数据,保存在共内存(简单举例)
//pShareData->Gps[0]=1.56;
//pShareData->Gps[1]=2.34;
//pShareData->Gps[2]=3.14;
//pShareData->Gps[3]=4.78;
return (uchar*) pShareData->Gps; //返回指针
}
/*
函数功能: python -> c++库 -> 共享内存 -> c++库-> python
python 调用 (c++端直接通过类的变量引用就可以)
python 获取共享内存中的gps数据 python传送过来一个结构体,修改pytho原结构体返回
函数输入:
float pShareData->Gps[4] C++ 共享内存结构体pShareData中的GPS数据
StructGpsData gps C++的结构体- python需要将对应的python结构体输入
函数输出:
StructGpsData gps (python接收端需要指明接收数据类型 )
*/
StructGpsData py_get_cgg_gps_Struct( StructGpsData gps){
// c++发送端调用其他函数更新GPS数据,保存在共内存(简单举例)
//pShareData->Gps[0]=1.56;
//pShareData->Gps[1]=2.34;
//pShareData->Gps[2]=3.14;
//pShareData->Gps[3]=4.78;
//共享内存数据更新gps数据
gps.flag=1;
gps.msg="new share data from c++ share";
gps.longitude=pShareData->Gps[0];
gps.latitude=pShareData->Gps[1];
gps.high=pShareData->Gps[2];
gps.time=pShareData->Gps[3];
return gps;
}
/*
函数功能: python -> c++库 -> 共享内存
python 调用 (c++端直接通过类的变量引用就可以)
python 修改共享内存中的gps数据 python传送过来一个结构体,修改C++原结构体
函数输入:
float pShareData->Gps[4] C++ 共享内存结构体pShareData中的GPS数据
StructGpsData gps C++的结构体- python需要将对应的python结构体输入
函数输出:
StructGpsData gps (python接收端需要指明接收数据类型 )
*/
StructGpsData py_Set_cgg_gps_Struct( StructGpsData gps){
// c++发送端调用其他函数更新GPS数据,保存在共内存(简单举例)
gps.flag=1;
gps.msg="new share have set share c++";
pShareData->Gps[0]=gps.longitude;
pShareData->Gps[1]=gps.latitude;
pShareData->Gps[2]= gps.high;
pShareData->Gps[3]=gps.time;
return gps;
}
};//类定义结束
}//namespace 定义
//按照C语言格式重新打包-python调用
//如果调用端开启了线程 这部份无法直接访问到 需要在线程里面重新创建这个类
//如果是单纯的C++调用,不需要这个样子封装
extern "C" {
MyShare::Share_class useShare;
int DestroyShare_(){
useShare.DestroyShare();
}
int Send_pic2_share_once_(cv::Mat Img){
useShare.Send_pic2_share_once(Img);
}
int pySend_pic2_share_once_(uchar *frame_data, int height, int width){
useShare.pySend_pic2_share_once(frame_data, height, width);
}
int Rec_pic2_data_once_(){
useShare.Rec_pic2_data_once();
}
uchar* Img_Cgg2py_(){
useShare.Img_Cgg2py();
}
int Get_ImgFlag_(){
useShare.Get_ImgFlag();
}
int Set_ImgFalg_(int value){
useShare.Set_ImgFalg(value);
}
float pyarr_set_cgg_gps_share_(float *data, int len) {
useShare.pyarr_set_cgg_gps_share( data, len);
}
uchar* py_get_cgg_gps_share_(){
useShare.py_get_cgg_gps_share();
}
MyShare::StructGpsData py_get_cgg_gps_Struct_( MyShare::StructGpsData gps){
return useShare.py_get_cgg_gps_Struct(gps);
}
MyShare::StructGpsData py_Set_cgg_gps_Struct_(MyShare::StructGpsData gps){
return useShare.py_Set_cgg_gps_Struct(gps);
}
}
#endif
c++发送端
send_example.cpp
#include <stdio.h>
#include <string.h>
#include <unistd.h>
#include <stdlib.h>
#include <sys/shm.h>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
#include <vector>
#include <string>
#include "ApiShare_dll.cpp"
using namespace std;
int main()
{
//1创建对象 可以不创建 调用文件自动有一个
//1-1如果调用端在新的线程调用了,需要在新的线程创建这个类
//1-2如果不用python库编译 可以注销了C格式的类封装 每次调用临时创建
//MyShare::Share_class useShare; //头文件c++封装c函数时候已经创建了
//2-1发送数据-读取数据
cv::Mat Img=cv::imread("00001.JPG",cv::IMREAD_COLOR);
//cv::imshow("RecData_Show",Img);
//char key=cv::waitKey(0);
//2-2修改标志位--用来控制读取同步
useShare.pShareData->flag = 0; //提醒。第一次初始化强制给0,清除上次程序残留结果,类初始化已经给0了
//3发送图像
while (1){
sleep(0.001);//防止绝对的空循环导致CPu占用,其他进程无法修改共享内存
//发送gps-C++直接访问类变量发送修改
if( useShare.pShareData->flag ==0){
useShare.pShareData->Gps[0]=32.3;
useShare.pShareData->Gps[1]=12.3;
useShare.pShareData->Gps[2]=72.3;
useShare.pShareData->Gps[3]=12.3;
}
if( useShare.pShareData->flag ==0){//读取完毕,允许存图
// 发送图像-C++模式 T256相机通用模式 输入Mat 类型图像
//useShare.Send_pic2_share_once(Img);//发送一张图像
//发送图像-C++和python模式 注意图像格式为 uchar* 数组 有的数据例如 T265图像就用不了
useShare.pySend_pic2_share_once((uchar*)Img.data,Img.rows,Img.cols);//发送一张图
useShare.pShareData->flag =1;//存储完毕,允许读图
}
if(useShare.pShareData->flag ==3){ //接收端读取成功并且将标志位修改成3 关闭
break;
}
}
//销毁
//useShare.DestroyShare(); //销毁共享内存 类释放时候会自动销毁,这里做个提醒
}
C++接收端
recive_example.cpp
#include <stdio.h>
#include <string.h>
#include <unistd.h>
#include <stdlib.h>
#include <sys/shm.h>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
#include <vector>
#include <string>
#include "ApiShare_dll.cpp"
using namespace std;
int main()
{
//1创建对象
//1-1如果调用端在新的线程调用了,需要在新的线程创建这个类
//1-2如果不用python库编译 可以注销了C格式的类封装 每次调用临时创建
//MyShare::Share_class useShare;
//2创建接受图像
cv::Mat RecImg = cv::Mat(IMAGE_H,IMAGE_W,IMAGE_TYPE,cv::Scalar(255, 255, 255));//bufHight,bufWidth
cv::namedWindow("RecData_Show",0);
//3接受GPS数据
float Gps_c[4];
//3接受图像
while (1){
sleep(0.001);//防止绝对的空循环导致CPu占用,其他进程无法修改共享内存
//接受GPS
if( useShare.pShareData->flag ==1){
Gps_c[0]=useShare.pShareData->Gps[0];
Gps_c[1]=useShare.pShareData->Gps[1];
Gps_c[2]=useShare.pShareData->Gps[2];
Gps_c[3]=useShare.pShareData->Gps[3];
for(int i=0;i<=3;i++){cout<< "GPS_DATA"<<i <<" "<<Gps_c[i] <<" ";}
cout<<endl;
}
//接受图像
if( useShare.pShareData->flag ==1){//存储完毕,允许读图
useShare.Rec_pic2_data_once();//接受一张图像自动保存在useShare.cvoutImg中,然后修改标志位
RecImg=useShare.cvoutImg;
useShare.pShareData->flag =0;//读取完毕,允许存图
}
cv::imshow("RecData_Show",RecImg);
char key=cv::waitKey(1);
if(key=='q'){ useShare.pShareData->flag=3; printf("按键退出"); break;}
}
//销毁
//useShare.DestroyShare(); //销毁共享内存 类释放自动销毁
return 0;
}
python发送端
py_send.py
import numpy as np
import time
import ctypes
import os
import cv2
#更多类型参看 https://docs.python.org/3/library/ctypes.html
# c_bool c_char c_int c_long c_float c_double
# c_char_p c_wchar_p c_void_p
#1载入库
libLoad = ctypes.cdll.LoadLibrary
sharelib = libLoad("./build/libpython2share.so")
#--------------0-发送单个int 初始第一次设置为0 允许开始存图------------------------
sharelib.Set_ImgFalg_.argtype = ctypes.c_int # 设置函数输入值类型 int可忽略
#sharelib.Set_ImgFalg_(0) #修改c++类的某一个变量(py只能通过函数而非直接访问修改)
sharelib.Get_ImgFlag_.restype = ctypes.c_int # 设置返回值类型 int可忽略
#reuslt=sharelib.Get_ImgFlag_()#获取变量的结果
#--------------------2-1 数组修改GPS ----------------
def py_Arr_GPS(pyarray):
sharelib.pyarr_set_cgg_gps_share_.restype = ctypes.c_float #定义函数返回值类型
#pyarray = [1., 2., 3., 4.] #创建py数组
carray2cgg = (ctypes.c_float * len(pyarray))(*pyarray) #转化成c_float指针
reuls_sum=sharelib.pyarr_set_cgg_gps_share_(carray2cgg, len(pyarray)) #调用查询
size=(1,4) #将获取的数组变成 1*3矩阵
pose = np.reshape(np.array(np.fromiter(carray2cgg, np.float64, size[0]*size[1])), size)
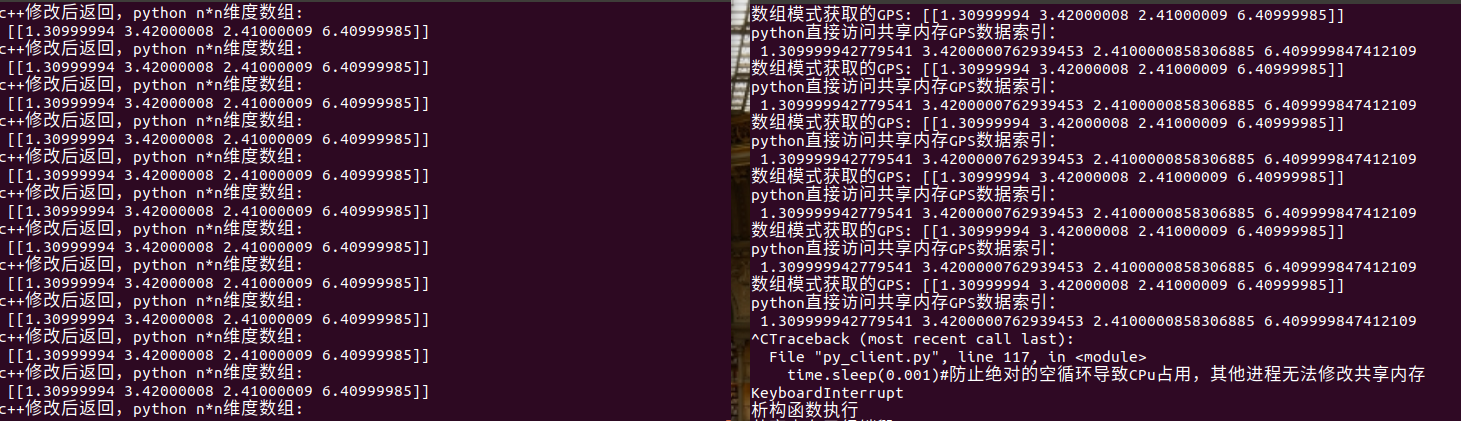
print("c++修改后返回,python n*n维度数组:\n",pose)
#--------------------2-2 结构体修改GPS ----------------
#python创建结构体
class py_Struct_GPS(ctypes.Structure):
_fields_ = [
('flag', ctypes.c_int), #c++ int
('msg', ctypes.c_char_p), #c++ char*
('longitude', ctypes.c_float), # c++ float
('latitude', ctypes.c_float),# c++ float
('high', ctypes.c_float),# c++ float
('time', ctypes.c_float)# c++ float
] #c++ char*[]
#python结构体赋予初值
struct_gps=py_Struct_GPS()
struct_gps.flag=ctypes.c_int(0)
struct_gps.msg=ctypes.c_char_p('GPS DATA'.encode())
struct_gps.longitude=ctypes.c_float(0.)
struct_gps.latitude=ctypes.c_float(0.)
struct_gps.high=ctypes.c_float(0.)
struct_gps.time=ctypes.c_float(0.)
print("结构体gps_old \n",struct_gps)
print(struct_gps.flag,struct_gps.msg.decode(),struct_gps.longitude,struct_gps.latitude,struct_gps.high,struct_gps.time)
#0 GPS DATA 0.0 0.0 0.0 0.0
def SetGPSToShare_struct(struct_gps,flag,msg,longitude,latitude,high,time):
struct_gps.flag=ctypes.c_int(flag)
struct_gps.msg=ctypes.c_char_p(msg.encode())
struct_gps.longitude=ctypes.c_float(longitude)
struct_gps.latitude=ctypes.c_float(latitude)
struct_gps.high=ctypes.c_float(high)
struct_gps.time=ctypes.c_float(time)
#从c++获取数据-数据保存在 共享内存或C++直接生成
# 定义返回类型为结构体类型
sharelib.py_Set_cgg_gps_Struct_.restype = py_Struct_GPS
# 调用获取gps数据-返回数据结构体
struct_gps= sharelib.py_Set_cgg_gps_Struct_(struct_gps)
#print(struct_gps.flag)
print(struct_gps.msg.decode()) #必须解码
#print("结构体gps_new \n",struct_gps)
#print(struct_gps.flag,struct_gps.msg.decode(),struct_gps.longitude,struct_gps.latitude,struct_gps.high,struct_gps.time)
#1 new data 1.559999942779541 2.559999942779541 3.559999942779541 5.559999942779541
#--------------------2-2 结构体拿GPS ----------------
#3发送图像
sharelib.Set_ImgFalg_(0) #允许存图
pyimage = cv2.imread("img_data/00001.jpg")#读取原始图像
#cv2.imshow("1 ", pyimage)
#cv2.waitKey(0)
def SendImgFromShare(image):
image_data = np.asarray(image, dtype=np.uint8)#图像转化成数组
image_data = image_data.ctypes.data_as(ctypes.c_char_p)#数组转化成C指针一维数组
sharelib.pySend_pic2_share_once_(image_data,image.shape[0],image.shape[1])#发送到共享内存
while True:
time.sleep(0.001)#防止绝对的空循环导致CPu占用,其他进程无法修改共享内存
#发送gps数据-数组模式
gps_p=[1.31, 3.42, 2.41, 6.41]
py_Arr_GPS(gps_p)
#发送gps数据-结构体模式
#SetGPSToShare_struct(struct_gps,0,"set gps to share",11.034,145.565,80.0,121314)
#发送图像数据
if sharelib.Get_ImgFlag_()==0:#读图结束,允许存图
SendImgFromShare(pyimage)#发送图像
sharelib.Set_ImgFalg_(1)#存图结束,允许读图
if sharelib.Get_ImgFlag_()==3:
print("接收端停止")
break
c++接收端
py_client.py
import numpy as np
import time
import ctypes
import os
import cv2
#更多类型参看 https://docs.python.org/3/library/ctypes.html
# c_bool c_char c_int c_long c_float c_double
# c_char_p c_wchar_p c_void_p
#1载入库
libLoad = ctypes.cdll.LoadLibrary
sharelib = libLoad("./build/libpython2share.so")
#--------------0-发送单个int 初始第一次设置为0 允许开始存图------------------------
sharelib.Set_ImgFalg_.argtype = ctypes.c_int # 设置初始值类型
#sharelib.Set_ImgFalg_(0) #修改c++类的某一个变量(py只能通过函数而非直接访问修改)
sharelib.Get_ImgFlag_.restype = ctypes.c_int # 设置返回值类型
#reuslt=sharelib.Get_ImgFlag_()#获取变量的结果
# -----------------2-1 获取gps数组----------------
# 设置输出数据类型为uint8的指针
def ReadGPSFromShare():
sharelib.py_get_cgg_gps_share_.restype =ctypes.POINTER(ctypes.c_float) #c_char_p
#获取输出图像数据指针
pointer_f_gps= sharelib.py_get_cgg_gps_share_()
size=(1,4)
#数据转化成图像
gps = np.reshape(np.array(np.fromiter(pointer_f_gps, dtype=np.float, count=size[0]*size[1])) ,size)
print("数组模式获取的GPS:",gps)
return gps
# -----------------2-1 获取gps数组结束----------------
#--------------------2-2 结构体拿GPS ----------------
#python创建结构体
class py_Struct_GPS(ctypes.Structure):
_fields_ = [
('flag', ctypes.c_int), #c++ int
('msg', ctypes.c_char_p), #c++ char*
('longitude', ctypes.c_float), # c++ float
('latitude', ctypes.c_float),# c++ float
('high', ctypes.c_float),# c++ float
('time', ctypes.c_float)# c++ float
] #c++ char*[]
#python结构体赋予初值
struct_gps=py_Struct_GPS()
struct_gps.flag=ctypes.c_int(0)
struct_gps.msg=ctypes.c_char_p('GPS DATA'.encode())
struct_gps.longitude=ctypes.c_float(0.)
struct_gps.latitude=ctypes.c_float(0.)
struct_gps.high=ctypes.c_float(0.)
struct_gps.time=ctypes.c_float(0.)
print("结构体gps_old \n",struct_gps)
print(struct_gps.flag,struct_gps.msg.decode(),struct_gps.longitude,struct_gps.latitude,struct_gps.high,struct_gps.time)
#0 GPS DATA 0.0 0.0 0.0 0.0
#从c++获取数据-数据保存在 共享内存或C++直接生成
# 定义返回类型为结构体类型
sharelib.py_get_cgg_gps_Struct_.restype = py_Struct_GPS
# 调用获取gps数据-返回数据结构体
struct_gps= sharelib.py_get_cgg_gps_Struct_(struct_gps)
#print(struct_gps.flag)
#print(struct_gps.msg.decode()) #必须解码
print("结构体gps_new \n",struct_gps)
print(struct_gps.flag,struct_gps.msg.decode(),struct_gps.longitude,struct_gps.latitude,struct_gps.high,struct_gps.time)
#1 new data 1.559999942779541 2.559999942779541 3.559999942779541 5.559999942779541
#--------------------2-2 结构体拿GPS ----------------
# -----------------3python read cgg 读取图像-------------------
def ReadImgFromShare():
# 设置输出数据类型为uint8的指针
sharelib.Img_Cgg2py_.restype =ctypes.POINTER(ctypes.c_uint8) #c_char_p
#获取输出图像数据指针
pointer_img = sharelib.Img_Cgg2py_()
size=(1080,1920,3)
#数据转化成图像
RecImg = np.reshape(np.array(np.fromiter(pointer_img, dtype=np.uint8, count=size[0]*size[1]*size[2])) ,size)
'''
print(RecImg.shape)#1920*1080*3
print(RecImg)
if RecImg is not None:
#展示图像
#cv2.namedWindow("showimg",0)
cv2.imshow("showimg ", RecImg)
cv2.waitKey(1)
#return RecImg
else:
return 1
'''
return RecImg
while True:
time.sleep(0.001)#防止绝对的空循环导致CPu占用,其他进程无法修改共享内存
if sharelib.Get_ImgFlag_()==1:#存图结束,允许读图
#方法1-直接访问共享内存接受GPS数据
PyArr1x4Gps=ReadGPSFromShare()#获取GPS
print("python直接访问共享内存GPS数据索引:\n",PyArr1x4Gps[0][0],PyArr1x4Gps[0][1],PyArr1x4Gps[0][2],PyArr1x4Gps[0][3])
#方法2-通过结构体访问共享内存接受GPS数据
# 调用获取gps数据-返回数据结构体
struct_gps= sharelib.py_get_cgg_gps_Struct_(struct_gps)
#print("python通过结构体获取共享内存GPS数据:\n",struct_gps.flag,struct_gps.msg.decode(),struct_gps.longitude,struct_gps.latitude,struct_gps.high,struct_gps.time)
#接受图像
Py_img=ReadImgFromShare()
#展示图像
cv2.namedWindow("showimg1",0)
cv2.imshow("showimg1 ", Py_img)
cv2.waitKey(1)
sharelib.Set_ImgFalg_(0)#读图结束,允许存图
if sharelib.Get_ImgFlag_()==3:
break

 浙公网安备 33010602011771号
浙公网安备 33010602011771号