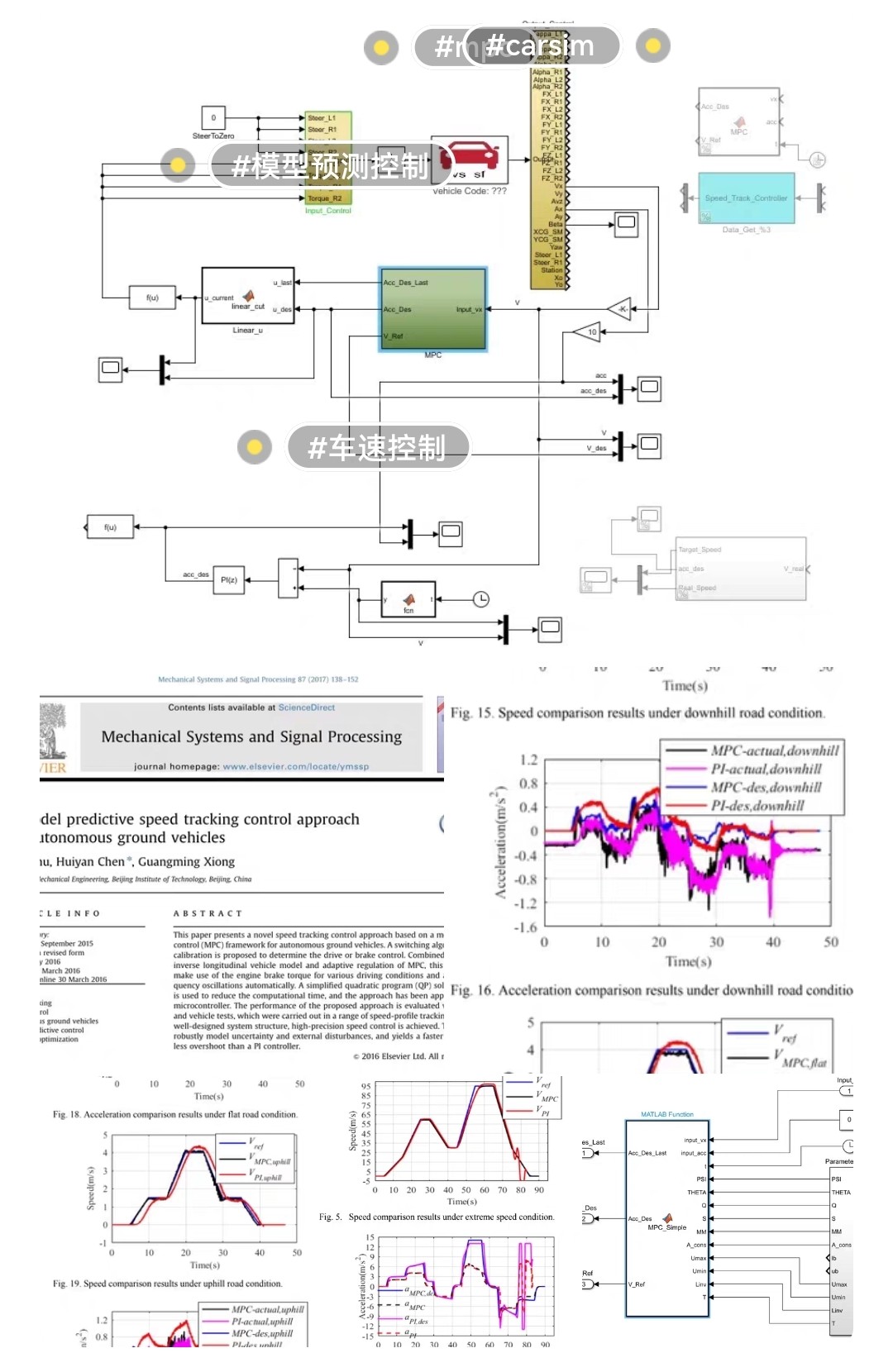
基于模型预测MPC实现的车速控制(如图),控制目标为电动汽车,采用上下层控制器控制,上层mpc产生期望的加速度,下层根据加速度产生期望的扭矩控制车速,同时该算法可直接用于代码生成(本人已经做过实车实验对比MPC和PID,效果良好, 如图所示),后续可以用于车速需求的控制(如acc,轨迹跟踪等)。
有对应文章学习(如图)和文件说明。
以及本人的,仿真包运行。
ID:85150689353075811