离散数学(图与网络)
图
图的基本概念
简单图:不允许有平行边和反身边。
无向图:允许有平行边和反身边。
有限图:有限点构成的图一定是有限图,但是有限边构成的图不一定是有限图(可能有无数个孤立点)
零图:只有点,没有边。
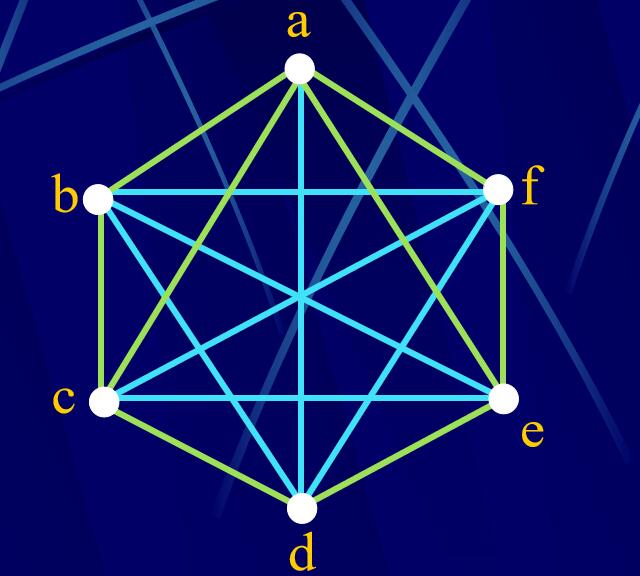
完全图:任意两点之间都有边。边的数量是\(\mathrm{C}_{\mathrm{m}}^{2}\) (m是顶点数)

图的同构:图经过一系列物理变化(伸缩、旋转),变化前后的两个图看成同一个图

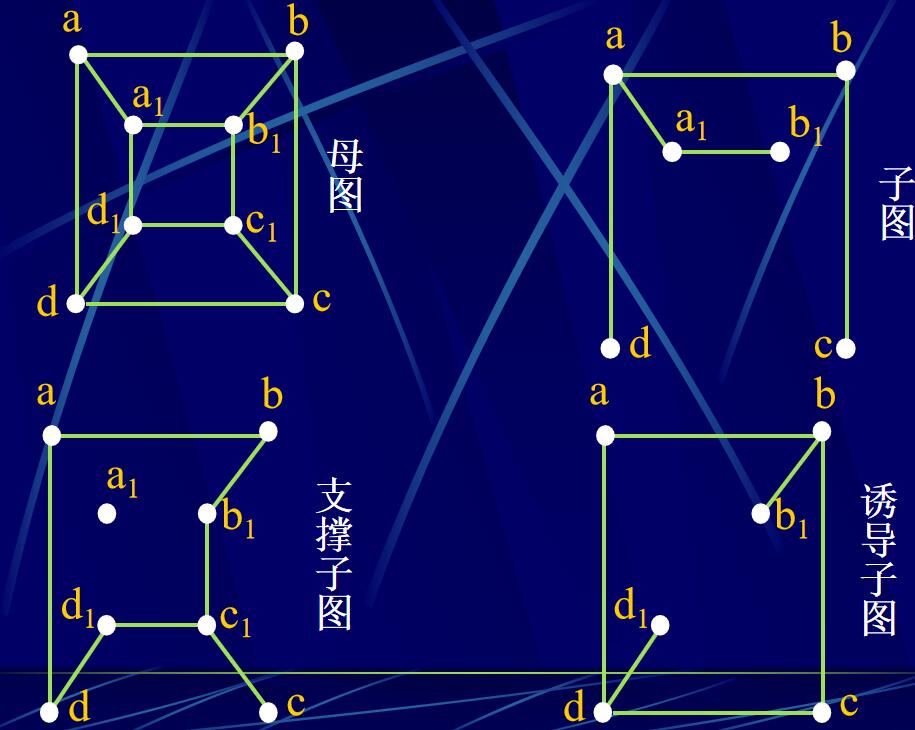
母图
子图:母图的一部分
支撑子图:点与母图一致,边可以少
诱导子图:去点母图某个(些)点的同时把与点相连的边去掉。
度:\(d_G\left( v \right)\)与某点相连的边的个数。 度为0的点为“孤立点”
关联矩阵:表示点和边之间的关系
特点:
-
每一列之和一定为2,因为每一条边一定只有两个顶点
-
每一行之和表示该顶点的度,因为表示它是某一个边的顶点
邻接矩阵:表示点与点之间有没有边
特点:
- 主对角线元素为0
- 对称矩阵
- 每一行或每一列之和表示顶点的度
定理4.1.1:所有点的度数之和是边数的二倍(所有点的度数之和一定是偶数)
定理4.1.2:在任一有限图中,奇数点的个数为偶数
证明:由定理4.1.1,且知道偶数点的度之和一定是偶数,那么奇数点的度数之和一定也是偶数,那么奇数点的个数也一定是偶数
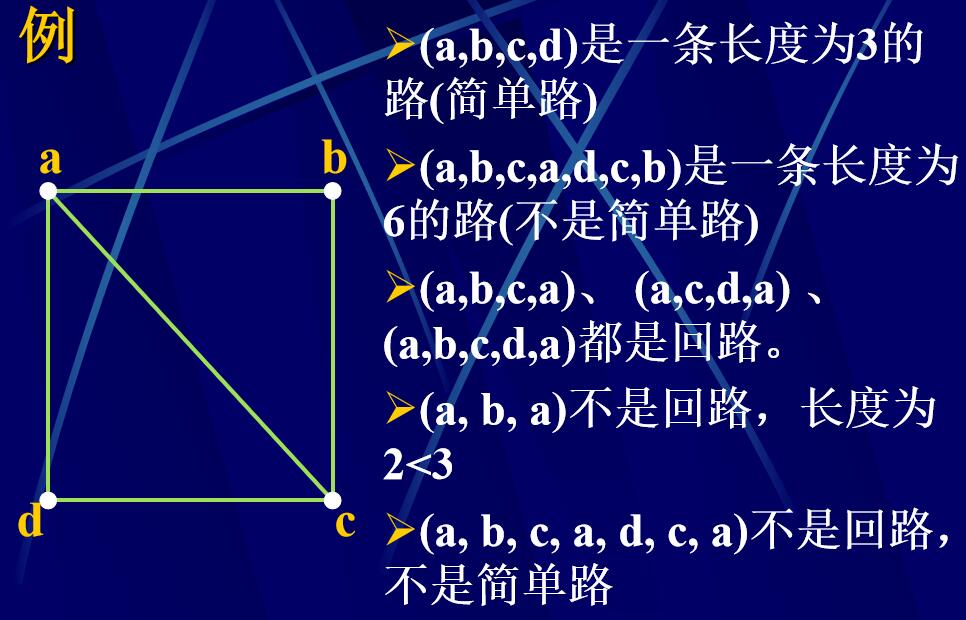
简单路:除开头v0和结尾点vn可以相同以外,路径上的点不可以相同
回路:G中从点v到自身的长度不小于3的简单路
相连:从u到v有一条路(v与自身相连)
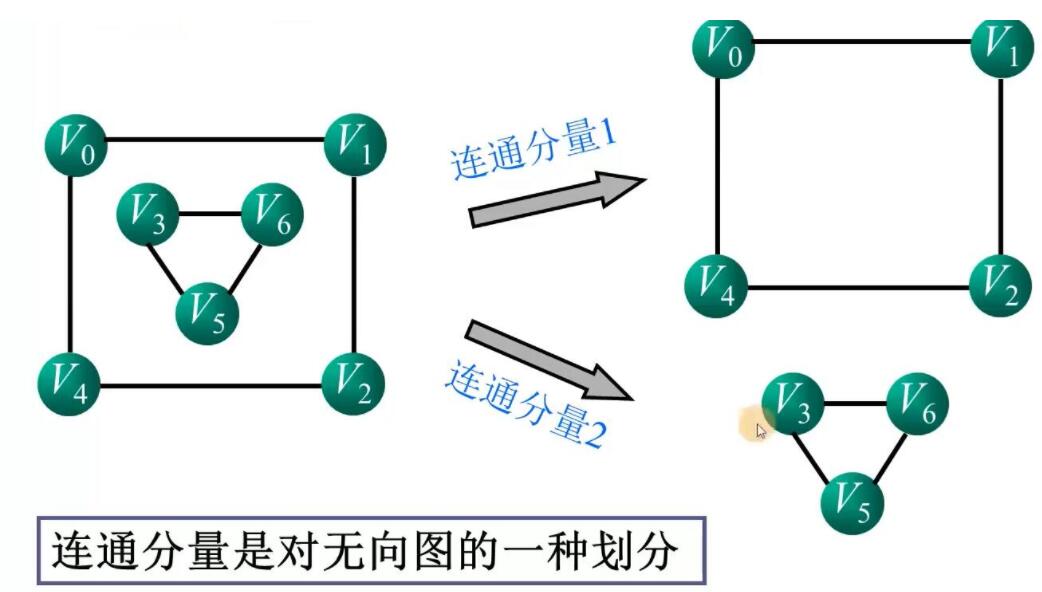
连通分支:非连通图的极大连通子图
证明一个图是连通图的方法:
1.直接证明
2.反证法
常考定理:设G=(P,L)是有限图,P(G),L(G)的元数分别为m,n。证明:如果n> \(\mathrm{C}_{\mathrm{m}-1}^{2}\) ,则G是连通的。(至少m-1个点之间都有边)
证明:反证法。假设此时G不是连通的,则将G中的一个连通分支作为一个子图记为G1,剩余的部分记为G2。可设P(G1)的元数为m1,P(G2) 的元数为m2,其中1≤m1,m2<m,m1+m2=m。则:
n≤m1(m1-1)/2+ m2(m2-1)/2=1/2(\(\mathrm{m1}^2\)+\(
\mathrm{m2}^2
\)- m1- m2)
=1/2( \(
\mathrm{(m1+m2)}^2\)- 2m1m2 - ( m1+ m2 ))
=1/2(\(\mathrm{m}^2\)-m-2m1m2)
由于(m1-1) (m2-1) ≥0所以有:
m1 m2- (m1+m2)+1≥0 即 m1 m2≥ m-1,则有:
n≤1/2(\(\mathrm{m}^2\)-m-2m1m2)≤1/2(m2-m-2(m-1))
=1/2(m2-3m+2)=1/2(m-1)(m-2)= \(\mathrm{C}_{\mathrm{m}-1}^{2}\)
例题:有限图G,|P(G)|=6,|L(G)|=11,则G可能不是连通图(X)
解:\( \mathrm{L}\left( \mathrm{G} \right) =11>\mathrm{C}_{5}^{2}=10\) 一定连通
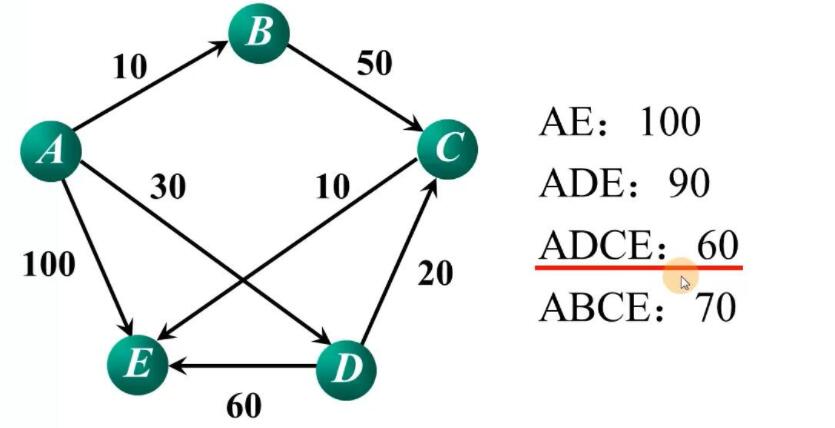
权图 Dijkstra算法(单源点最短路径问题)
权值:带有某种含义的边
最短路径:两顶点之间经历的权值之和最短的路径
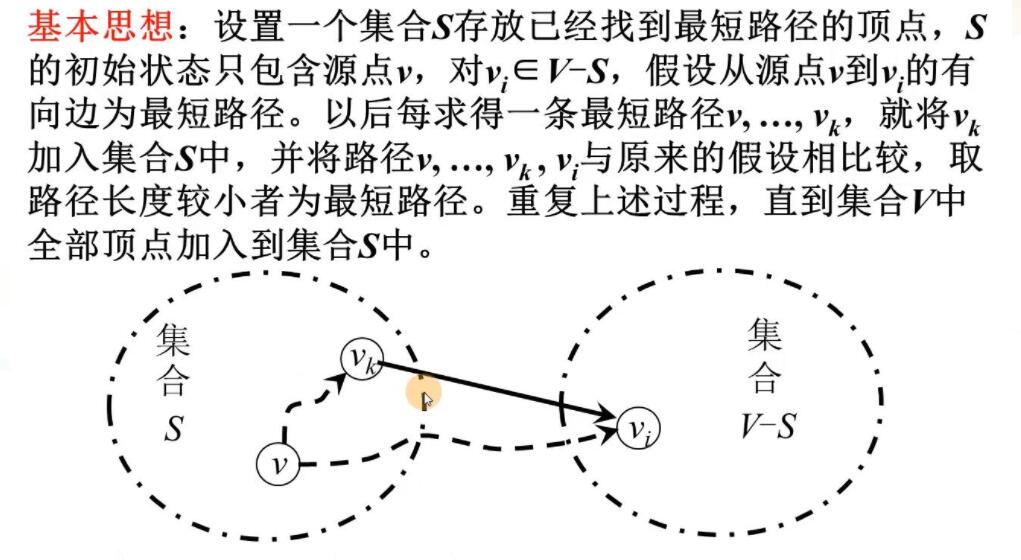
Dijkstra算法
Dijkstra算法演示
例一
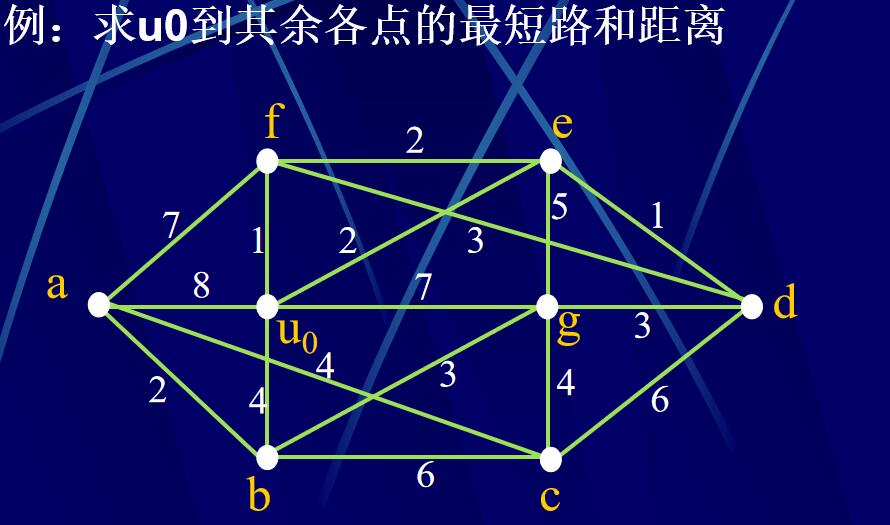
例二

首先确定是一个邻接矩阵,可以画出权图,求A到其他点的最短路径
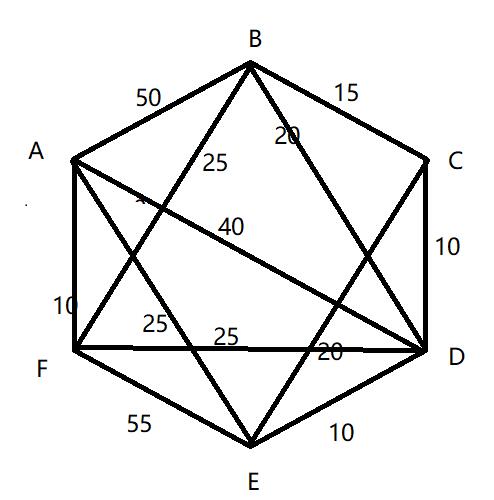
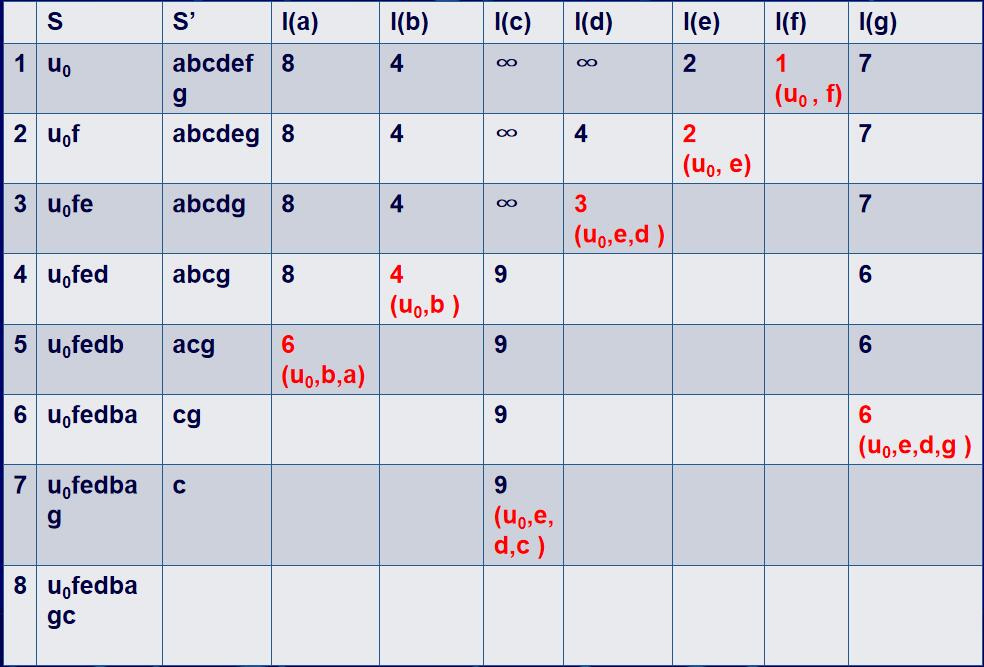
列表:
| S | S' | B | C | D | E | F |
|---|---|---|---|---|---|---|
| A | BCDEF | 50 | \(\infty\) | 40 | 25 | 10(AF) |
| AF | BCDE | 35(AFB) | \(\infty\) | 35(AFD) | 25(AE) | |
| AFE | BCD | 35(AFB) | 45(AEC) | 35(AFD)(AED) | ||
| AFEB | CD | 45(AEC) | 35(AFD)(AED) | |||
| AFEBD | C | 45(AEC)(AFDC)(AEDC) | ||||
| AFEBDC |
第一轮:
l(B)=w(AB)=50,l(C)=w(AC)= \(\infty\) ,l(D)=w(AD)=40,l(E)=w(AE)=25,l(F)=w(AF)=10
第二轮:
l(B)=min{l(B),l(F)+w(FB)}=min{50,10+25}=35
l(C)=min{l(C),l(F)+w(FC)}=min{ \(\infty\) , \(\infty\) }= \(\infty\)
l(D)=min{l(D),l(F)+w(FD)}=min{40,10+25}=35
l(E)=min{l(E),l(F)+w(FE)}=min{25,10+55}=25
第三轮:
l(B)=min{l(B),l(E)+w(EB)}=min{35,25+ \(\infty\) }=35
l(C)=min{l(C),l(E)+w(EC)}=min{ \(\infty\) ,25+20}=45
l(D)=min{l(D),l(E)=w(ED)}=min{35,25+10}=35
第四轮:
l(C)=min{l(C),l(B)+w(BC)}=min{45,35+15}=45
l(D)=min{l(D),l(B)+w(BD)}=min{35,35+20}=35
第五轮:
l(C)=min{l(C),l(D)+w(DC)}=min{45,35+10}=45
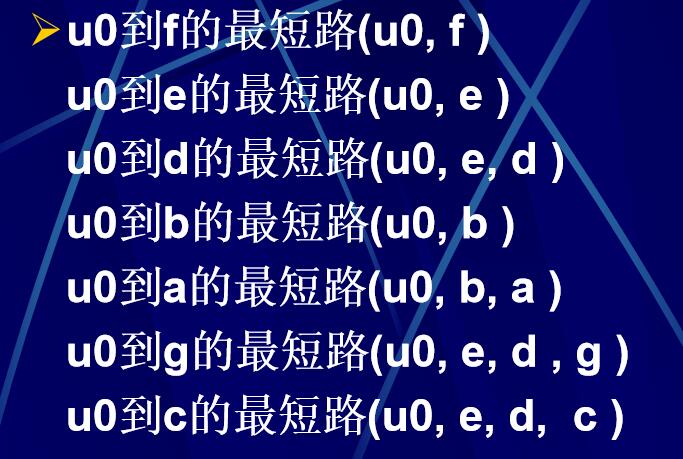
A==>B:35(AFB)
A==>C:45(AEC)(AFDC)(AEDC)
A==>D:35(AFD)(AED)
A==>E:25(AE)
A==>F:10(AF)
树
树及其等价定义
定义4.2.1:设G=(P,L)是图,如果G是连通的,并且无回路,则称G为树.无回路的图(可能不连通)也称为森林.
引理4.2.1:设G是至少有一条边的有限图,且无回路,则G至少有一个点只相邻于另一个点,即G至少有一个点度数为1.
定理4.2.1:如果G是图,则下列诸命题等价.
(1)G是树.
(2)G连通并且删去G的任意一边,所得到的图都不连通.
(3)对G中任意两点v,v'(v≠v'),恰有一条从v到v'的简单路.
如果G还是有限图,设P(G)元数为n,则下列命题也与上面的命题等价.
(4)C不含回路,并且G有n -1条边.
(5)G连通,并且G有n -1条边.
推论4.2.1:任意有限连通图必有一支撑子图是树。今后,此支撑子图称为母图的支撑树.
推论4.2.2:若G'是有限图G的支撑树,w'为G中一边,且 w'不在G'中,则G'添上边'后必有回路.
Kruskal算法
定义4.2.2:设G是加权连通图,带有最小权(和)的支撑树称为权图G的最优树。
设权图G=(P, L)是连通的。
在L(G)中选一个具有最小权值的边,记为\(l_1\),令T={ \(l_1\) };
从L(G)-T中取\(l_i\),使得T∪{\(l_i\)}不产生回路,并且w(\(l_i\))最小。如果存在这样的\(l_i\),则令T= T∪ {\(l_i\)},重复步骤2);
如果不存在这样的\(l_i\),则算法停止。
白话:每次选取权值最小的边,前提是不能产生回路,如果产生回路需要换一条次小的回路,......直到选出n-1条边(n是点的个数)。
树的常用结论:
1.每一株恰好有两个点度是1的树必是一条简单路(d=2(n-1))
2.若G为∆≥k的树,其中∆是G中点的最大度,则G最少有k个点的度是1(d=2(n-1))
有向图 Euler路
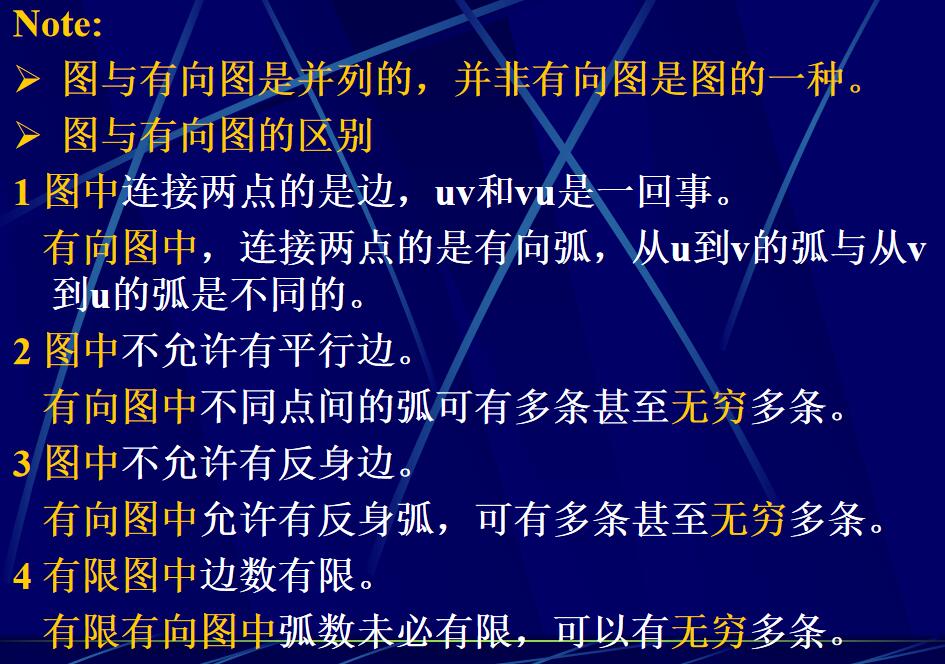
有向图
定义4.3.1 :G=(P, A)称为有向图,如果P是点集合,A是从一点引到一点(不要求一定是另一点)的弧集合。当P为有限集时,G称为有限有向图.若e是一条从点v到点v’的弧,则称v为e的起点,记为v=init(e);v’为e的终点,记为v’=fin(e).
起点和终点都是点v的弧称为反身弧。
出度(输出次数)、入度(输入次数)、度(输入加输出)
有向子图(P(H) \(\subseteq\)P(G),A(H)\(\subseteq\)A(G))、支撑子图(P(H)=P(G))
有向路
简单有向路(简单路):有向图的有向路,n条弧的起点互不相同,n条弧的终点也互不相同
有向回路:从点v到自身的简单有向路(长度可以为1或2)称为有向回路,是简单路。
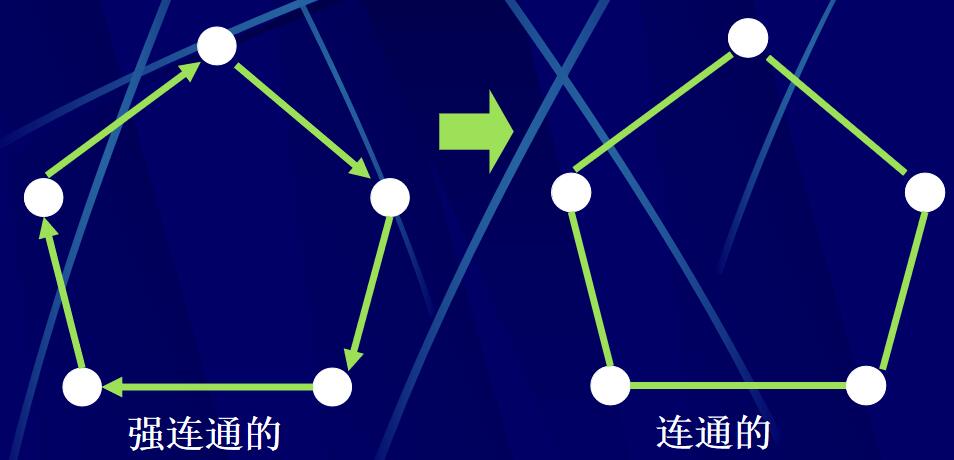
强连通:设G=(P,A)是有向图,对G中任意两点v,v’ (v\(\ne\)v’),如果都有从v到v’的有向路,则称G是强连通的。有从任意点到任意点的路)
根:设G=(P,A)是有向图,r\(\in\)P(G)。称r为G的根,如果对G中任一点v (v\(\ne\)r),都有从v到r的有向路。(所有点有到根的路)
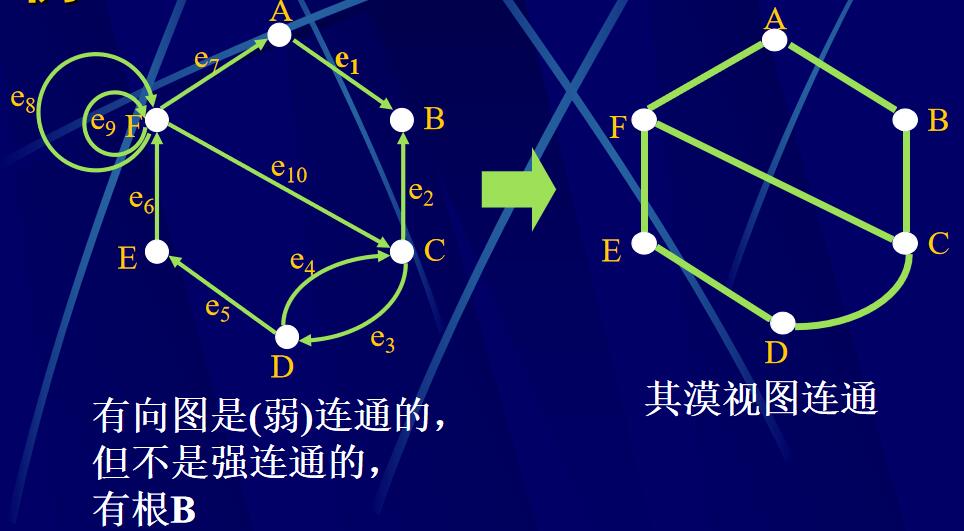
漠视图:
(1)删去G中自身到自身的弧(反身弧);
(2)G中任意两点,若有弧,只保留一条;
(3)删去弧的方向,即得\(\mathrm{G}_0\)。
弱连通:漠视图连通。
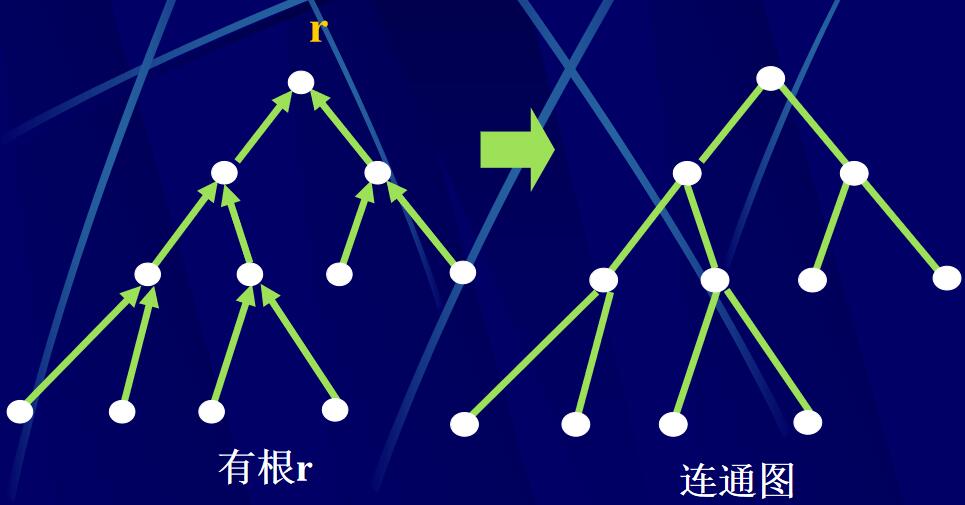
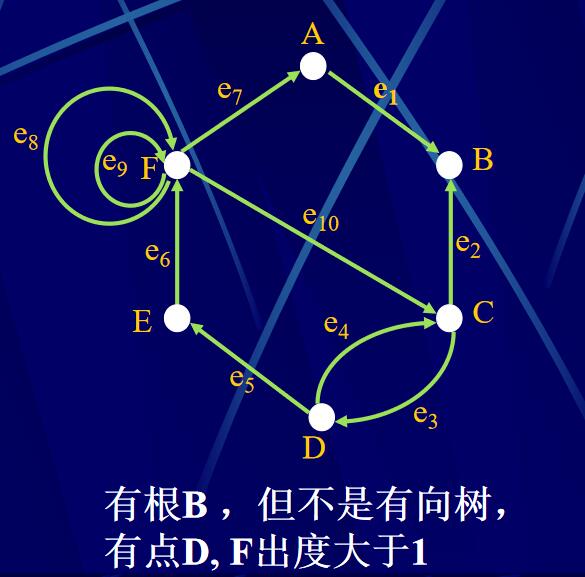
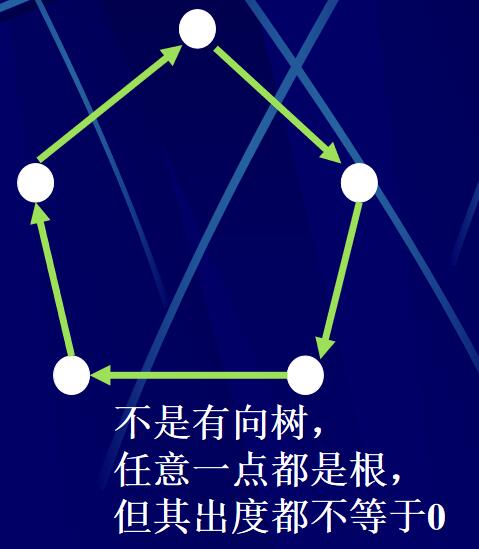
有向树:
有向图G称为有向树(或有根树),如果G中有一点r,并且满足:
(1) G中每一点v(v\(\ne\)r)都恰是一条弧e的起点;
(2) r不是任一条弧的起点;
(3) r是根。
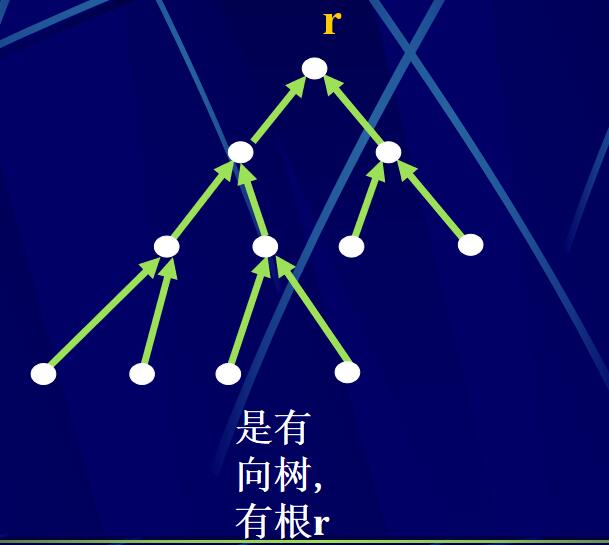
有向树的特点:
- 每一点v(v\(\ne\)r)到r恰有一条有向路;
- 没有有向回路;
- 两点间最多有一条弧。
转化定理:
对有向树G,若无视各弧之方向,则得一树\(\mathrm{G}_0\); (--命题1)
反之,若\(\mathrm{G}_0\)是树,可选取任一点做根,并适当指定各边之方向,则得一有向树G。(--命题2)
Euler路
Euler路:(注意这个图很重要)
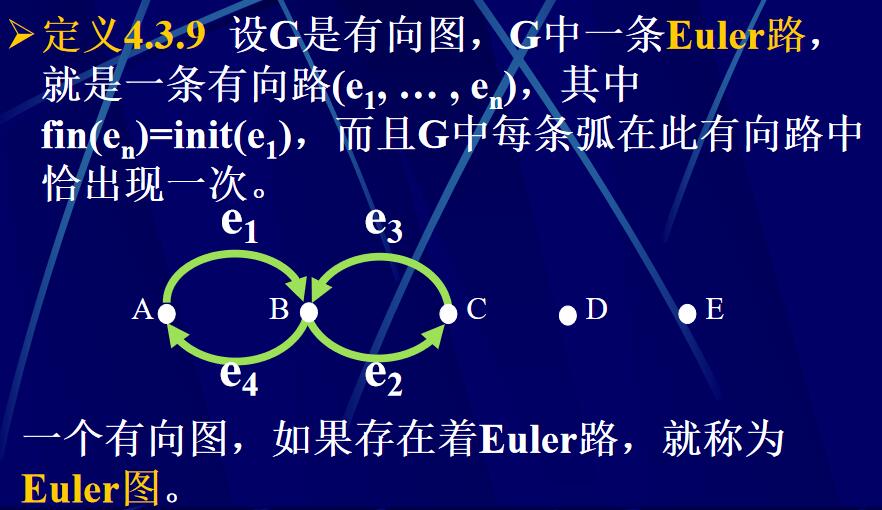
Euler路实际上是一条封闭的一笔画路线
平衡有向图:设G是有向图。如果G中每点v,都有有限的输入次数和输出次数,而且输入次数和输出次数相等。
一有限平衡有向图,其弧数必有限。
一有向图若存在Euler路,则必平衡。
判定Euler图的充要条件:设G是无孤立点的有限有向图。于是,G有Euler路当且仅当G是平衡的,并且强连通。
推论:设G是无孤立点的有限有向图,于是,G有Euler路当且仅当G平衡,并且将G漠视为图\(\mathrm{G}_0\)时是连通的(弱连通) 。
哈密顿(Hamilton)图
Hamilton路 Hamilton图的必要条件
定义4.4.1 设G=(P, L)是有限图,(v1, … , vn)是G中一条路。如果G中每点恰在此路中出现一次,则称此路为Hamilton路。
如果G中每点,除v1外,恰在此路中出现一次,而v1=vn,则此路称为Hamilton回路。
定义4.4.2 设G=(P, L)是有限图,如果G中有一条Hamilton回路,则称G为Hamilton图。
比较Hamilton路、Hamilton回路与Euler路:
Hamilton路一定为简单路;
Euler路未必简单有向路。
Hamilton路着眼于无重复地遍历图中诸点;
Euler路着眼于无重复地遍历有向图中诸弧。
Hamilton路、Hamilton回路是G的支撑子图,
Hamilton路是G的支撑树;
Euler路未必为G的支撑子图。
存在Euler路,未必存在 Hamilton回路。
存在Hamilton回路,未必存在Euler路。
Hamilton路和Hamilton回路的性质
- 若图中有一点的度为1,则无Hamilton回路。
- 若图中有一点的度为0,则既无Hamilton路,
又无Hamilton回路。 - 设图中有一点的度为2,若有Hamilton回路,
则以此点为端点的两条边均出现在此回路中。 - 设图中有一点的度大于2,若有Hamilton回
路,则只用其中的两条边。 - 若图中有n个点,则
Hamilton路恰有n-1条边,
Hamilton 回路恰有n条边。 - Hamilton路是图G的支撑子树,
Hamilton回路是图G的支撑子图。
Hamilton路、Hamilton图的必要条件
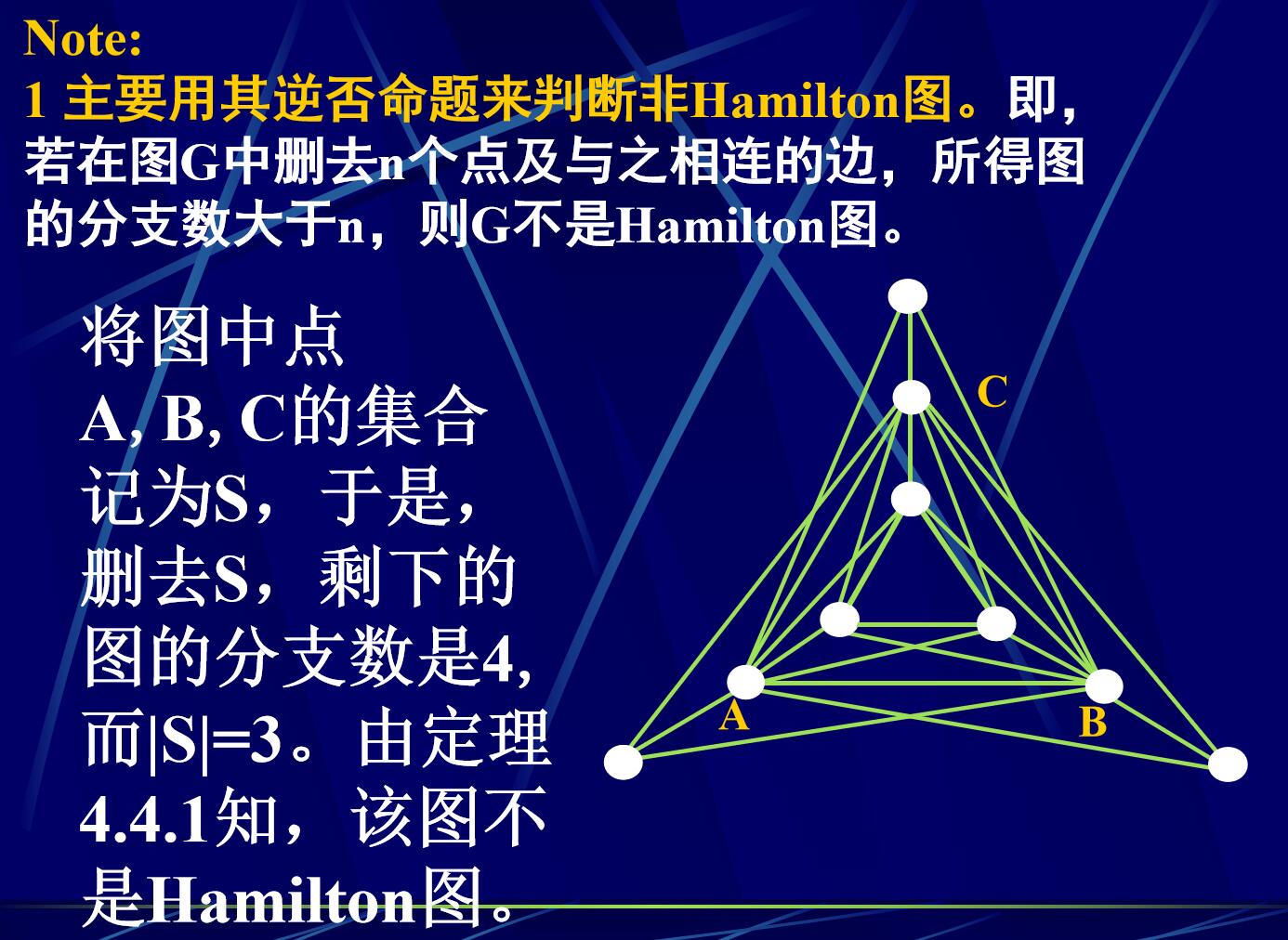
定理4.4.1: 如果图G=(P, L)是Hamilton图,则对P(G)的任一非空子集S,都有W(G-S) \(\leqslant\) |S|(连通分支数小于等于去掉的点的个数)
其中:
|S| 表示集合S的元素数,S就是删除的点集
G-S表示在G中删除S中的点以及以S中的点为端点的所有边而剩下的图(诱导子图),
W(G-S)表示图G-S的连通分支数。
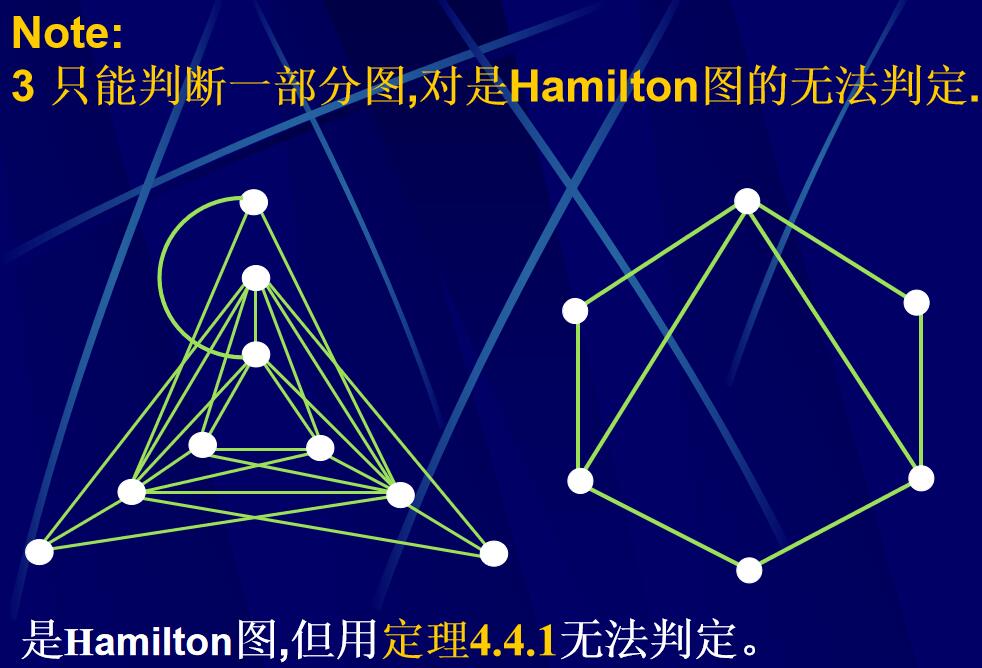
常用其逆否命题用来证明该图不是Hamilton图(如果连通分支数大于去掉的点的个数则不是Hamilton图)

Hamilton图的充分条件
定理4.4.2:若G=(P, L)是有限图\(\gamma \geqslant 3\text{,}\delta \geqslant \gamma /2\),则G是Hamilton图。
其中,\(\gamma\)表示图G中点数,即\(\gamma\)=|P(G)|,
\(\delta\)表示G中点的最小度。
白话:点数大于等于3,点的最小度大于等于点总数的二分之一
引理4.4.1:设G是有限图,u, v是G中不相邻的两点,并且满足:d(u)+d(v) $\geqslant \gamma $,则G是Hamilton图的充要条件是G∪{uv}是Hamilton图。
闭合图:设G是有限图。反复连接G中不相邻的并且其度之和不小于\(\gamma\)的点对,直到没有这样的点对为止。最后所得的图称为G的闭合图,记为C(G)。
引理4.4.2 :有限图G的闭合图C(G)是唯一确定的
定理4.4.3:有限图G是Hamilton图的充要条件是闭合图C(G)是Hamilton图。
推论:设G是有限图,若C(G)是完全图,则G是Hamilton图
推论的逆不成立:若G是Hamilton图,则C(G)未必是完全图
(定理4.4.3强于4.4.2)
常用结论:若一个图G的任意两点度数之和≥n-1,n=|P(G)|≥3,则该图有Hamilton路。
证明:
向图G中增加一个点v,并且连接v点与G中已有的n个点,设得到的图为G’, 这样:G’中点v的度为n,G中的n个点在G’中的度分别增加了1;从而有:G’中来自G的任意两个点的度数之和≥n-1+1+1=n+1;
而G’中v点与其他任意点的度数之和≥n+1;这样,G’中任意两点度数之和≥n+1=|P(G’)|。
则G’的闭合图是完全图,根据定理4.4.3的推论,可知G’是Hamilton图,则G’中有Hamilton回路,形如:
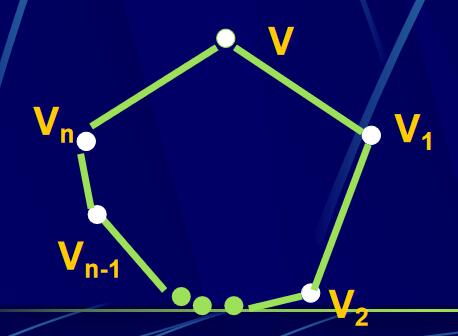
而且这条H回路只用了\(\mathrm{vv}_1\), \(\mathrm{vv}_n\)这两条新增加到G中的边,从而删除v点,G中存在Hamilton路.
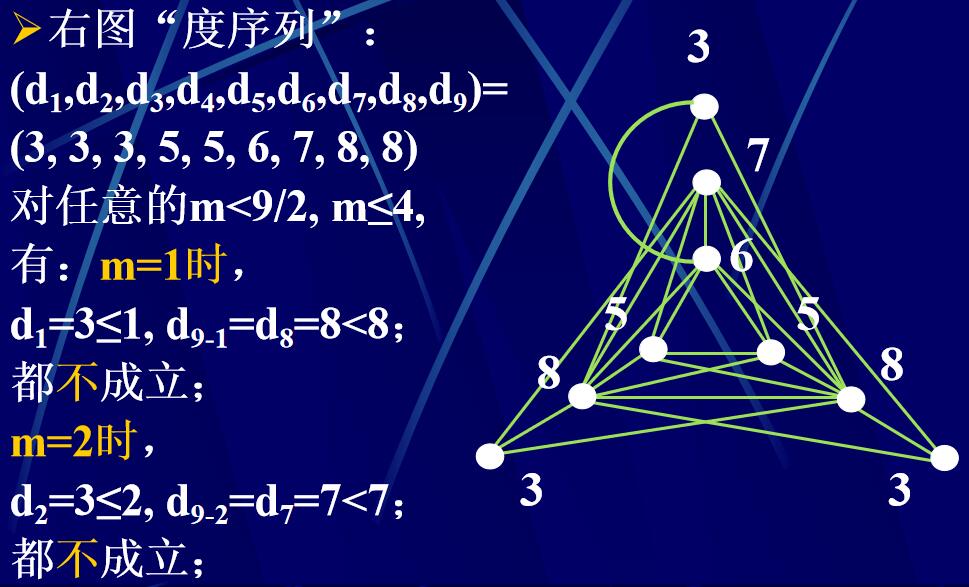
定理4.4.4 :设有限图G的度序列(即G的各点的度,按非降序排成的序列)为(d1,d2,…,\(d_{\gamma}\)),其中d1\(\leqslant\)d2\(\leqslant\)…\(\leqslant\)\(=d_{\gamma}\),\(\gamma\) \(\leqslant\) 3.
如果不存在这样的m, m< \(\gamma\)/2 ,并使得\(d_m\)\(\leqslant\) m , \(d_{\gamma -m}\leqslant \gamma -m\)则G是Hamilton图。
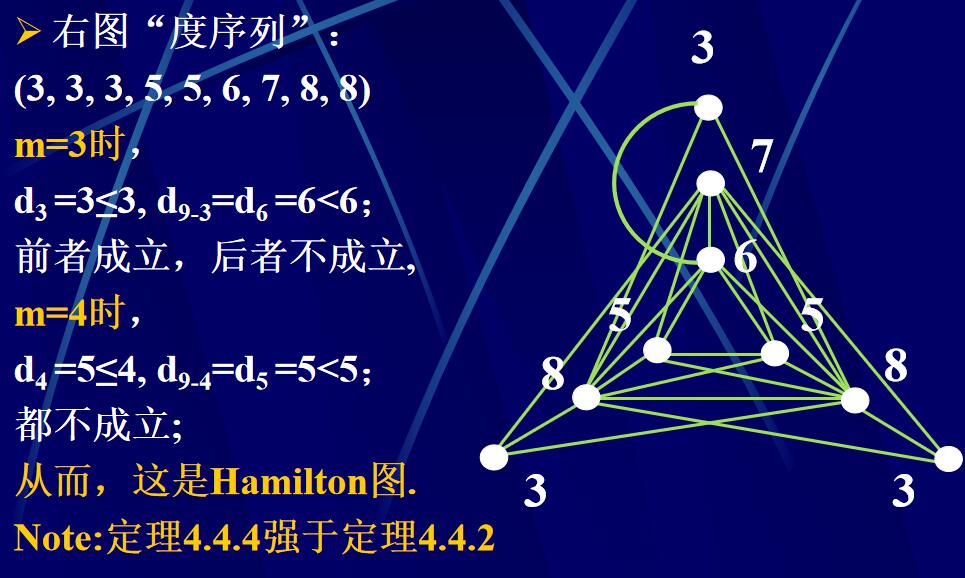
定理4.4.4强于定理4.4.2
定义4.4.4 :实数序列(p1, …, pn)称为由实数序列(q1, …, qn)所增大,如果pi\(\leqslant\)qi, i=1,…,n 称为不减度序列
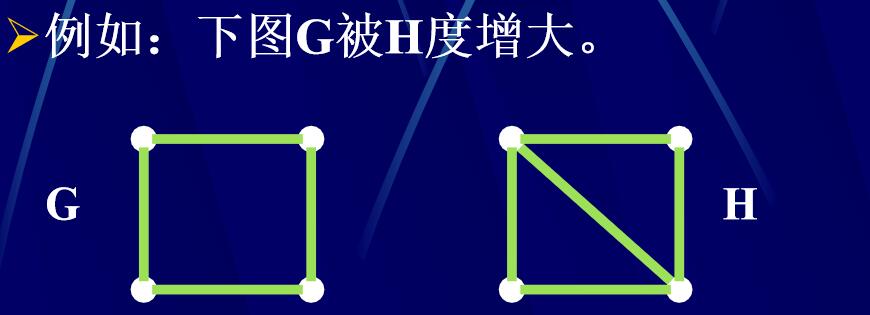
例如: (2, 2, 2, 2)由(2, 2, 3, 3)所增大
定义4.4.5: 设G,H是有限图。G称为被H度增大,如果|P(G)|=|P(H)|,并且G的不减度序列被H的不减度序列所增大
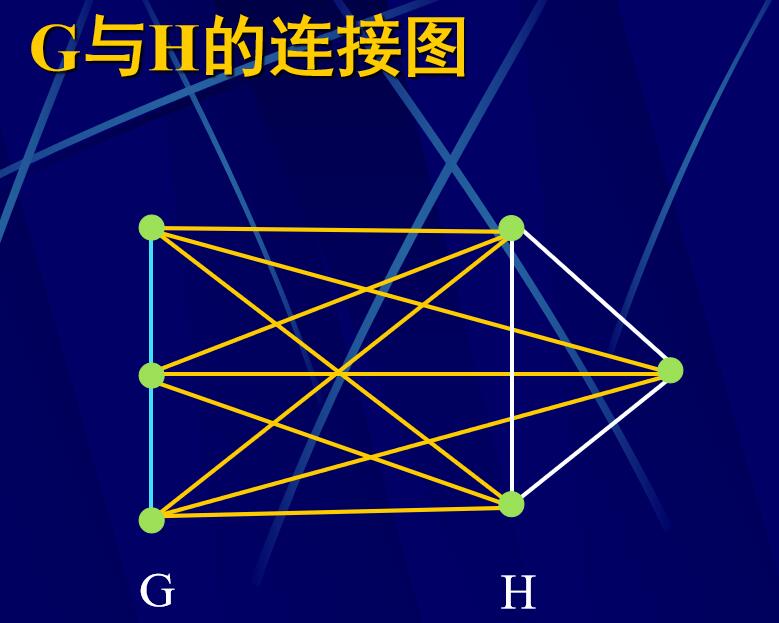
定义4.4.6 :设G,H是两个无公共点的有限图。将G的每个点和H的每个点都用边连接起来得到的图,称为G与H的连接图
定义4.4.7: 设G,H是两个有限图,如果P(G)=P(H),并且对G,H中任意两点u、v,u和v在G中相邻当且仅当它们在H中不相邻,则称G是H的补图,H是G的补图,可以将G记为\(\mathrm{H}_{\mathrm{c}}\),也可将H记为\(\mathrm{G}_{\mathrm{c}}\)

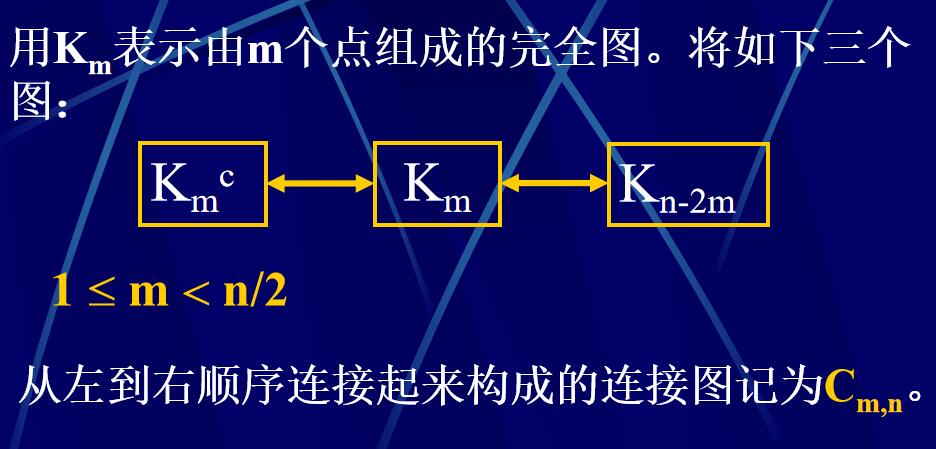
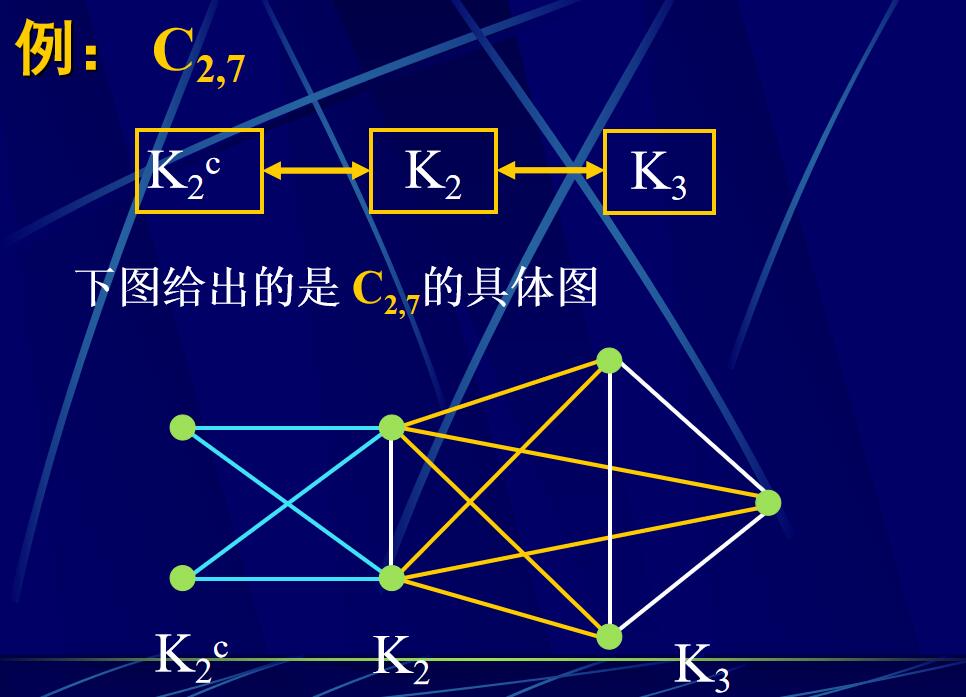
引理4.4.3:若1 \(\leqslant\) m < n/2 ,则图 \(\mathrm{C}_{\mathrm{m},\mathrm{n}}\)是非Hamilton图
定理4.4.5:若G为非Hamilton图,\(\mathrm{\gamma}\geqslant\) 3,则G由某个\(\mathrm{C}_{\mathrm{m},\mathrm{n}}\)所度增大。其中\(\gamma\)是P(G)的元数。该定理的逆定理不成立
连接图\(\mathrm{C}_{\mathrm{m},\mathrm{\gamma}}\)的不减度序列是

例如

例题:

常用结论:
设G是图,P(G)=n,L(G)=m,若 m≥\(\frac{1}{2}\)(n-1)(n-2)+2=\(\mathrm{C}_{\mathrm{n}-1}^{2}+2\),则G一定是Hamilton图。
n个点的边数最多的非Hamilton图是边数为 \(\frac{1}{2}\)(n-1)(n-2)+1=\(\mathrm{C}_{\mathrm{n}-1}^{2}+1\)的图。(即n个点的边数最多的非Hamilton图是\(\mathrm{C}_{1,\mathrm{n}}\))
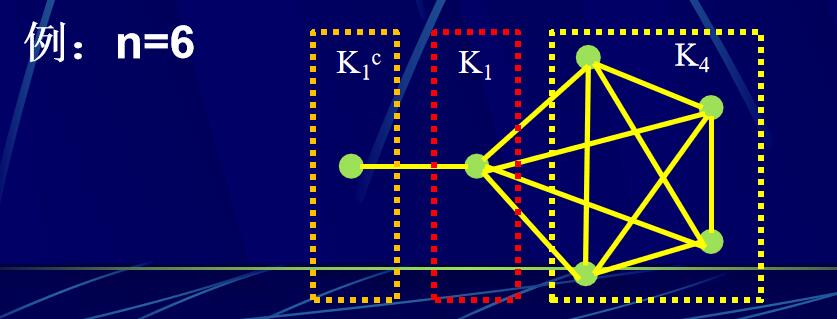
理解:之前讲过当边数m>\(\mathrm{C}_{\mathrm{n}-1}^{2}\)时也就是m\(\geqslant\)\(\mathrm{C}_{\mathrm{n}-1}^{2}\)+1时图必定连通,此时可以理解成1个点p和\(\mathrm{K}_{\mathrm{n}-1}\)这个完全图相连。此时没有哈密顿回路,不是哈密顿图,如果把这个点p和\(\mathrm{K}_{\mathrm{n}-1}\)中的任意一个点相连,由于\(\mathrm{K}_{\mathrm{n}-1}\)是哈密顿图,p到\(\mathrm{K}_{\mathrm{n}-1}\)有路,从\(\mathrm{K}_{\mathrm{n}-1}\)到p有另一条路,这就形成了哈密顿回路,也就是形成了哈密顿图

往期回顾
离散数学(集合论)
离散数学(古典数理逻辑)
离散数学(图与网络)
离散数学(数论基础)
离散数学(格与布尔代数)
离散数学(群、环、域)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号