
在机器学习的特征选择中,利用选择矩阵的范数对选择矩阵进行约束,即是正则化技术,是一种稀疏学习。
矩阵的L0,L1范数
为了度量稀疏矩阵的稀疏性,则定义矩阵的一种范数,为: ∥W∥1=∑i,j|Wi,j|。即为矩阵所有元素的绝对值之和,能够描述接矩阵的稀疏性,但是在优化时,难度较大,是将情况向矩阵中元素尽可能是0的方向优化。
1)L0范数是指向量中非0的元素的个数。如果我们用L0范数来规则化一个参数矩阵W的话,就是希望W的大部分元素都是0。换句话说,让参数W是稀疏的。
2)L1范数是指向量中各个元素绝对值之和。L1范数是L0范数的最优凸近似。任何的规则化算子,如果他在Wi=0的地方不可微,并且可以分解为一个“求和”的形式,那么这个规则化算子就可以实现稀疏。W的L1范数是绝对值,|w|在w=0处是不可微。
3)虽然L0可以实现稀疏,但是实际中会使用L1取代L0。因为L0范数很难优化求解,L1范数是L0范数的最优凸近似,它比L0范数要容易优化求解。
矩阵的L2范数
L2范数,又叫“岭回归”(Ridge Regression)、“权值衰减”(weight decay)。它的作用是改善过拟合。过拟合是:模型训练时候的误差很小,但是测试误差很大,也就是说模型复杂到可以拟合到所有训练数据,但在预测新的数据的时候,结果很差。
L2范数是指向量中各元素的平方和然后开根。我们让L2范数的规则项||W||2最小,可以使得W的每个元素都很小,都接近于0。而越小的参数说明模型越简单,越简单的模型则越不容易产生过拟合现象。
L1是绝对值最小,L2是平方最小:L1会趋向于产生少量的特征,而其他的特征都是0,而L2会选择更多的特征,这些特征都会接近于0。
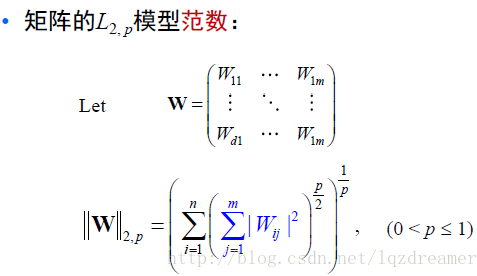
矩阵的L2,1范数
而为了进一步说明矩阵的稀疏性,来说明特征选择中矩阵L2,1范数的作用。
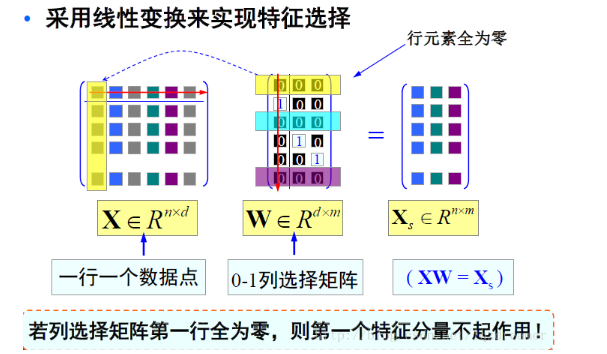
在特征选择中,通过稀疏化的特征选择矩阵来选取特征,即相当于是一种线性变换。
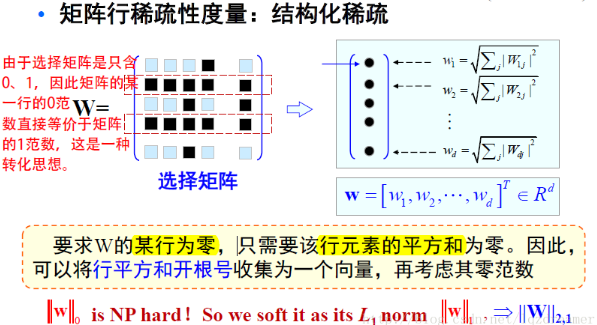
对于特征选择矩阵W,每一行(即行向量)用向量的2-范数描述,即 。那么,描述化之后即为向量
。那么,描述化之后即为向量 ,那么对整个选择矩阵W还需要用范数对
,那么对整个选择矩阵W还需要用范数对 进行描述,因为损失函数中的正则项,或称为正则化的项是一个数,而不是一个向量。因此再用1-范数对
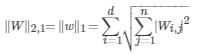
进行描述,因为损失函数中的正则项,或称为正则化的项是一个数,而不是一个向量。因此再用1-范数对 描述,即是W的L2,1范数。
描述,即是W的L2,1范数。
这便是矩阵的L2,1范数的实际描述过程。矩阵的L2,1范数满足矩阵范数的自反性、非负性、对称性和三角不等式关系,是一个范数。
先看上面L21范数的定义,注意原始矩阵是d行n列的,根号下平方是对列求和,也就是说是在同一行中进行操作的,根号部分就相当于一个L2范数,由此可以看出L2,1范数实则为矩阵X每一行的L2范数之和。在矩阵稀疏表示模型中,把它作为正则化项有什么作用呢?前面说到它是每一行的L2范数之和,在最小化问题中,只有每一行的L2范数都最小总问题才最小。而每一个行范数取得最小的含义是,当行内尽可能多的元素为0时,约束才可能取得最小。行内出现尽可能多的0元素,尽可能稀疏,也称为行稀疏。综上可以这样解释,不同于L1范数(矩阵元素绝对值之和)的稀疏要求,l21范数还要求行稀疏!
那么,在线性学习模型,损失函数如:

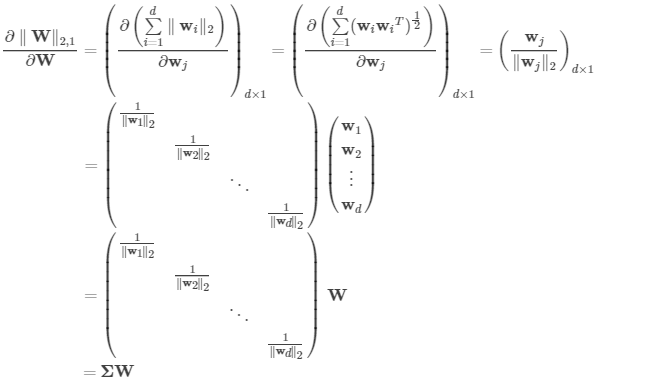
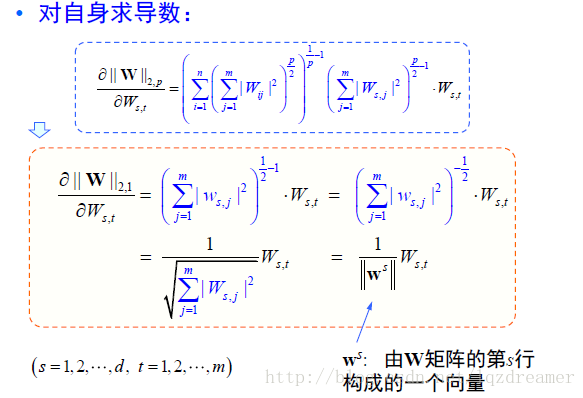
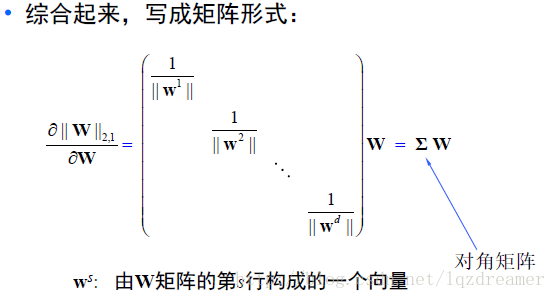
在优化中,矩阵的范数该如何求导?关于矩阵的F范数求导,可以参考矩阵的 Frobenius 范数及其求偏导法则(https://blog.csdn.net/txwh0820/article/details/46392293)。而矩阵L2,1范数求导如下推导:
对于一个矩阵W=[w1,⋯,wd]T , 其中wi 是W 的第i 行。由矩阵的定义有

那么,L2,1范数的求导为:
矩阵一般化L2,P范数的求导
就矩阵一般化L2,P范数给出推导:

矩阵的核范数Nuclear Norm
核范数||W||*是指矩阵奇异值的和,用于约束Low-Rank(低秩)。
从物理意义上讲,矩阵的秩度量的就是矩阵的行列之间的相关性。如果矩阵的各行或列是线性无关的,矩阵就是满秩的,也就是秩等于行数。秩可以度量相关性,而矩阵的相关性实际上有带有了矩阵的结构信息。如果矩阵之间各行的相关性很强,那么就表示这个矩阵实际可以投影到更低维的线性子空间,也就是用几个向量就可以完全表达了,它就是低秩的。所以:如果矩阵表达的是结构性信息,例如图像、用户-推荐表等,那么这个矩阵各行之间存在这一定的相关性,那这个矩阵一般就是低秩的。低秩矩阵每行或每列都可以用其他的行或列线性表出,可见它包含大量的冗余信息。利用这种冗余信息,可以对缺失数据进行恢复,也可以对数据进行特征提取。rank()是非凸的,在优化问题里面很难求解,rank(w)的凸近似就是核范数||W||*。
1)矩阵填充(Matrix Completion):
矩阵填充即矩阵补全,是低秩矩阵重构问题,例如推荐系统。其模型表述:已知数据是一个给定的m*n矩阵A,如果其中一些元素因为某种原因丢失了,能否根据其他行和列的元素,将这些元素恢复?当然,如果没有其他的参考条件,想要确定这些数据很困难。但如果已知A的秩rank(A)<<m且rank(A)<<n,那么可以通过矩阵各行(列)之间的线性相关将丢失的元素求出。这种假定“要恢复的矩阵是低秩的”是十分合理的,比如一个用户对某电影评分是其他用户对这部电影评分的线性组合。所以,通过低秩重构就可以预测用户对其未评价过的视频的喜好程度。从而对矩阵进行填充。
2)鲁棒主成分分析(Robust PCA):
主成分分析,可以有效的找出数据中最“主要"的元素和结构,去除噪音和冗余,将原有的复杂数据降维,揭示隐藏在复杂数据背后的简单结构。最简单的主成分分析方法就是PCA了。从线性代数的角度看,PCA的目标就是使用另一组基去重新描述得到的数据空间。希望在这组新的基下,能尽量揭示原有的数据间的关系。这个维度即最重要的“主元"。PCA的目标就是找到这样的“主元”,最大程度的去除冗余和噪音的干扰。
Robust PCA考虑的是这样一个问题:一般情况下数据矩阵X会包含结构信息,也包含噪声。那么可以将这个矩阵分解为两个矩阵相加,一个是低秩的(由于内部有一定的结构信息,造成各行或列间是线性相关的),另一个是稀疏的(由于含有噪声,而噪声是稀疏的),则Robust PCA可以写成优化问题:

与经典PCA问题一样,Robust PCA本质上也是寻找数据在低维空间上的最佳投影问题。对于低秩数据观测矩阵X,假如X受到随机(稀疏)噪声的影响,则X的低秩性就会破坏,使X变成满秩的。所以就需要将X分解成包含其真实结构的低秩矩阵和稀疏噪声矩阵之和。找到了低秩矩阵,实际上就找到了数据的本质低维空间。PCA假设数据的噪声是高斯的,对于大的噪声或者严重的离群点,PCA会被它影响,导致无法正常工作。而Robust PCA则不存在这个假设,它只是假设噪声是稀疏的,而不管噪声的强弱如何。
由于rank和L0范数在优化上存在非凸和非光滑特性,所以一般将它转换成求解以下一个松弛的凸优化问题:

具体应用:考虑同一副人脸的多幅图像,如果将每一副人脸图像看成是一个行向量,并将这些向量组成一个矩阵的话,那么可以肯定,理论上,这个矩阵应当是低秩的。但是,由于在实际操作中,每幅图像会受到一定程度的影响,例如遮挡,噪声,光照变化,平移等。这些干扰因素的作用可以看做是一个噪声矩阵的作用。所以可以把同一个人脸的多个不同情况下的图片各自拉长一列,然后摆成一个矩阵,对这个矩阵进行低秩和稀疏的分解,就可以得到干净的人脸图像(低秩矩阵)和噪声的矩阵了(稀疏矩阵),例如光照,遮挡等等。
矩阵的迹范数Trace Norm
Schatten范数:
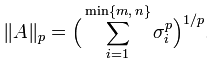
令p = 1 ,得到迹范数:

本文为自己学习过程中对其他资源的学习整理而得的学习笔记,内容源自:https://blog.csdn.net/lqzdreamer/article/details/79676305;https://blog.csdn.net/zchang81/article/details/70208061;https://blog.csdn.net/lj695242104/article/details/38801025


 浙公网安备 33010602011771号
浙公网安备 33010602011771号