无人机灯光秀,用到了哪些关键技术?
“灯光秀年年有,这两年特别多”。
尤其是当我们知道‘无人机’这一黑科技后,它就成了灯光秀表演的标配。每一次表演,都让人目眩神迷,并占据你的朋友圈头条。
但是你知道无人机灯光秀是如何实现的吗?它表演的原理是什么?用到了哪些关键性技术?下面,小编就为您详细介绍一下:
0 1 三维建模技术

无人机灯光秀用的是四旋翼无人机,本身飞行控制能力很强,可以前飞、后飞,可以悬停,可以平移,可以向任何方向调整自己的位置。无人机在空中呈现图形,并非像显示屏那样把每架飞机当做一个像素点,靠不同颜色的变化来呈现图形,而是每架飞机必须要飞到指定的位置才能调整灯光。
所以需要事先编好每架飞机的飞行轨迹和位置,包括对灯光的控制。电脑里面的软件根据人们画好的图案进行模型计算,把人们想要看到的画面转换成无人机的运动路径,然后变成无人机能看懂的0和1远程发送给每一架无人机。
0 2 令牌环网机制
地面上的电脑根据一定的模型计算出来了每架无人机的路径数据,那么它如何把数据发送给无人机呢?肯定是通过无线通信技术,但是有个问题就是单纯的点对点通信技术是应付不了这么大的阵仗的,大家的频率一样,直接把数据丢出去势必会乱套。

这里面就要用到IEEE802.5令牌环网技术。我们看到的无人机动作整齐划一,好像同时在受到控制一样,其实在一个极短的时间段里面只有一架无人机在跟电脑进行通信,它们在和电脑玩一个“击鼓传花”的游戏,这个花就是“令牌”,每架无人机收到数据后都会判断是不是自己的数据,如果是就收下“令牌”,否则就丢给其他兄弟。同一时刻只有拿到“令牌”的无人机有权利跟电脑通信,其他无人机则待命。
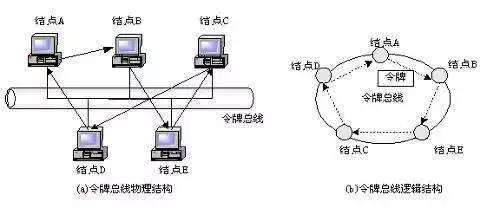
就这样,“令牌”在无人机之间快速反复地传递,确保每一位兄弟都有机会跟电脑通信上。
0 3 差分GPS(DGPS)技术
无人机收到了电脑发出来的路径规划之后,就要开始沿着自己的路径运动了,但这里有个问题,它是如何实时得知自己的位置并准确按照路径飞行的呢?

不难想象,很多人第一反应都是GPS。GPS我们经常用,手机上就有,车上也有。但是我们有没有注意到GPS的精度确实有瑕疵,经常把我们定位到马路对面?
民用的GPS定位精度只有3到5米。按照这样的定位精度来飞,就算无人机不撞成一锅粥,那组成的图案也会惨不忍睹。
怎么解决呢?这就要用到差分GPS技术了,差分GPS技术其实也是一种GPS技术的应用。无人机直接用GPS定位,由于存在无法消除的误差,导致定位精度达不到编队飞行的要求。这时候,伟大的工程师们想到了在地面上架设一个GPS基准站的点子,这个地面基准站有事先知晓的准确的空间坐标,然后跟实时测量到的GPS结果进行差分,把误差实时发送给无人机,无人机则根据收到的误差信息对自己的位置进行实时纠偏。这就是差分GPS技术。

大型无人机灯光表演出问题,可能性大概有以下几点:
一是定位系统。这和卫星有关系,需要定位得非常准确才可以。如果定位系统出了问题,比如GPS丢星,无人机就可能找不着自己编队。无人机架次越多,出问题几率就越高。
二是通信系统。大量的无人机和基站之间是要有通信的,这样才能知道每架飞机往哪儿飞,轨迹怎么规划,当前到达什么位置。若通信信号中断,无人机就会找不到自己位置。
三是飞行器本体问题。比如无人机自身电力不足,飞不动了,控制不了自己的姿态了,就会出现偏移。
说了这么多无人机编队的技术,其实对于工程师幕后的工作来说,还只是冰山一角。我们看到的二十多分钟的无人机灯光秀,惊艳了世人,刷爆了我们的朋友圈,对于没日没夜加班工作的工程师来说也算是最大的安慰了。
向所有平凡而伟大的工程师们致敬!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号