OpenAI 多智能体强化学习环境(multiagent-particle-envs)详解
multiagent-particle-envs是OpenAI开源的多智能体学习环境。
一、安装
Link:https://github.com/openai/multiagent-particle-envs
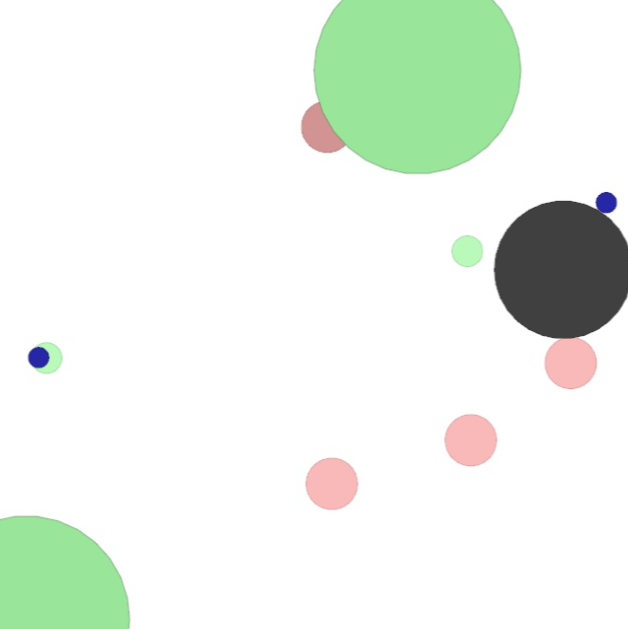
简称小球环境,也是MADDPG用的环境,基本上可以看做是较为复杂的 gridworld 的环境。 在这个环境涵盖了ma里的竞争/协作/通讯场景,你可以根据你的需要设置agent的数量,选择他们要完成的任务,比如合作进行相互抓捕,碰撞等,你也可以继承某一个环境来改写自己的任务。状态信息主要包括智能体的坐标/方向/速度等,这些小球的的原始动作空间是连续型的,不过在类属性里有个可以强制进行离散的设置,可以把它打开以后小球的动作就可以被离散为几个方向的移动了。此外,在这个环境中,小球之间的碰撞都都是模拟刚体的实际碰撞,通过计算动量,受力等来计算速度和位移。(以上内容摘自:https://www.zhihu.com/question/332942236/answer/1295507780,作者:咸鱼天,来源:知乎)。
Link:https://github.com/gingkg/multiagent-particle-envs
安装:
二、simple_world_comm环境详解
1、各类实体属性:
2、实体任务:
被捕食者 :在捕食者的拦截下,利用森林及障碍物来尽可能的靠近食物。
食物 :被捕食者的目标,靠近可获得奖励,奖励大小与靠近的距离有关。
树林 :可以对进入自身内部的智能体提供掩护,敌方无法获取单位的位置坐标,除非两个智能体位于同一个树林
地标 :不可通过的阻碍物。
3、需训练的智能体:
被捕食者 :2个,通过靠近食物来获取奖励,速度较快,数量较少。
捕食者:4个,需要有一定协同能力,通过阻碍被捕食者获取奖励,速度较慢,但数量较多。
原论文中6个智能体分别用MADDPG算法来训练。即训练成本会随着智能体的数量增加,由于交流功能的存在,训练成本和智能体数量并不为线性关系。
4、观测状态
见文件:multiagent-particle-envs/multiagent/scenarios/simple_world_comm.py
捕食者的观测状态为1*34的向量,具体为自身的速度(x和y两个方向,2)+自身的位置(x和y两个方向,2)+所有地标与自己的相对位置(地标位置-自身位置,10)+其他智能体与自己的相对位置(其他智能体位置-自身位置,10)+被捕食者的速度(4)+自身是否在树林里(2)+交流信息(4),数据格式float32,Box(34,)。非领导者的交流信息直接继承领导者的。
array([ 0. , 0. , -0.81360341, 0.31675768, 0.25026168,
-0.12137332, 1.26442749, -0.7671077 , 0.90388104, -1.00294841,
0.70155893, -0.62365125, 1.09197528, -0.92503425, 1.31906775,
0.53801265, 1.30256252, -0.5290839 , 1.3105693 , -0.16847554,
1.34816312, -0.82404067, 0.61383961, -1.30914401, 0. ,
0. , 0. , 0. , -1. , -1. ,
0. , 0. , 0. , 0. ])
array([ 0. , 0. , -0.1997638 , -0.99238633, -0.36357793,
1.18777069, 0.65058787, 0.54203631, 0.29004143, 0.3061956 ,
0.08771932, 0.68549276, 0.47813566, 0.38410976, -0.61383961,
1.30914401, 0.70522814, 1.84715666, 0.68872291, 0.78006011,
0.69672969, 1.14066847, 0. , 0. , -1. ,
-1. , 0. , 0. ])
5、动作空间
领导者:MultiDiscrete2,1*9维的向量。第一位无操作,2-5位给定智能体x,y正负方向上的加速度,6-9位为交流信息。
np.array([0, 1, 0, 1, 0, 1, 1, 1, 1],dtype=np.float32)
非领导捕食者:Discrete(5),1*9维的向量。第一位无操作,2-5位给定智能体x,y正负方向上的加速度。
np.array([0, 1, 0, 1, 0], dtype=np.float32)
举个例子(无碰撞情况),方便理解,对于领导者初始状态为:
[ 0. 0. 0.28664831 0.451448 -1.17817321 -1.14371152
0.36545598 -1.0833245 -1.06284931 0.20773417 -0.94155189 0.4072022
-0.10401275 -1.15910727 -0.19673305 -1.02704632 -0.78517681 -0.25047813
-0.36542734 -1.31392343 -0.07968565 -0.96594893 -0.95037937 -1.2023333
0. 0. 0. 0. -1. -1.
0. 0. 0. 0. ]
即,速度为(0,0);位置为(0.28664831, 0.451448)。
采取的动作为:
np.array([0, 1, 0, 1, 0, 1, 1, 1, 1],dtype=np.float32)
环境默认的周期t=0.1。
# x方向的加速度
a = 1 - 0
# 乘以比例系数(暂不清楚有何物理意义)
a = a * 3
# 考虑速度阻尼,上一时刻的速度 v= 0
v = v * (1 - 0.25)
# 计算下一时刻的速度,此处有一个系数mass,默认为1(暂不清楚有何物理意义)
v = v + (a/mass) * t
# 判断速度是否大于限定最大速度,如果大于,按最大速度在x,y方向上做分解
# 计算位置
p = p + v*t
下一时刻状态输出为:
[ 3.00000000e-01 3.00000000e-01 3.16648308e-01 4.81448005e-01
-1.20817321e+00 -1.17371152e+00 3.35455977e-01 -1.11332450e+00
-1.09284931e+00 1.77734173e-01 -9.71551887e-01 3.77202198e-01
-1.34012753e-01 -1.18910727e+00 -1.26733049e-01 -1.05704632e+00
-8.15176813e-01 -2.80478133e-01 -3.95427343e-01 -1.34392343e+00
-1.09685649e-01 -9.95948925e-01 -9.70904003e-01 -1.23477175e+00
5.26459117e-08 2.74805581e-08 9.47537011e-02 -2.43844654e-02
-1.00000000e+00 -1.00000000e+00 1.00000000e+00 1.00000000e+00
1.00000000e+00 1.00000000e+00]
6、创建、运行、显示环境的完整代码
import time
import numpy as np
import multiagent.make_env as make_env
env = make_env.make_env('simple_world_comm')
obs = env.reset()
print(env.observation_space)
print(env.action_space)
steps = 0
print(steps)
print(obs)
for _ in range(25):
steps += 1
print(steps)
action_n = [np.array([0, 1, 0, 1, 0, 1, 1, 1, 1],dtype=np.float32),
np.array([0, 10, 0, 0, 0], dtype=np.float32),
np.array([0, 0, 0, 0, 0], dtype=np.float32),
np.array([0, 0, 0, 0, 0], dtype=np.float32),
np.array([0, 0, 0, 0, 0], dtype=np.float32),
np.array([0, 0, 0, 0, 0], dtype=np.float32)]
next_obs_n, reward_n, done_n, _ = env.step(action_n)
print(next_obs_n)
print(reward_n)
print(done_n)
env.render()
time.sleep(0.1)
if all(done_n):
break
env.close()
需要注意的是,按照环境默认设置,done_n永远为 false,即环境永远不会结束,所以需要自己设定最大循环次数。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号