

29 基于PCL的点云平面分割拟合算法技术路线(针对有噪声的点云数据)
0 引言
最近项目中用到了基于PCL开发的基于平面的点云和CAD模型的配准算法,点云平面提取采用的算法如下。
1 基于PCL的点云平面分割拟合算法
2 参数及其意义介绍
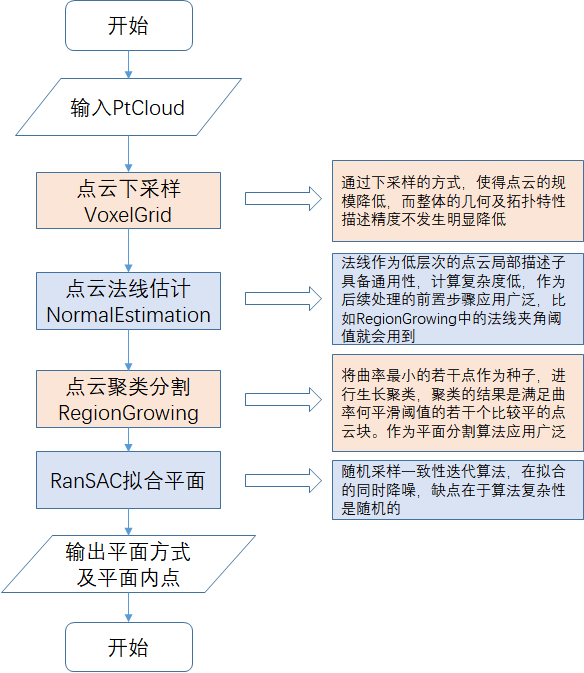
(1)点云下采样
1. 参数:leafsize
2. 意义:Voxel Grid的leafsize参数,物理意义是下采样网格的大小,直接影响处理后点云密集程度,并对后期各种算法的处理速度产生直接影响。
3. 值越大,点云密度越低,处理速度越快;值越小,点云密度越高,处理速度越慢。通常保持这个值,使得其他的与点数有关的参数可以比较稳定而不作大的改动。
4. 对应的代码:
PointCloudPtr cloud(new pointCloud); ParameterReader pd(ParameterFilePath); double leafsize = stod(pd.getData("leafsize")); pcl::VoxelGrid<PointT> sor; sor.setInputCloud(CRTP::cloud_org); sor.setLeafSize(leafsize, leafsize, leafsize); sor.filter(*cloud);
(2)点云法线估计
1. 参数:Ksearch
2. 意义:估计法线时邻域内点的个数
3. 值越小,对点云的轮廓描述越精细;值越大,对点云的轮廓描述越粗糙。
4. 对应的代码:

ParameterReader pd(ParameterFilePath); pcl::NormalEstimation<PointT, pcl::Normal> ne; pcl::PointCloud<pcl::Normal>::Ptr mynormals(new pcl::PointCloud<pcl::Normal>); pcl::search::KdTree<PointT>::Ptr tree(new pcl::search::KdTree<PointT>); tree->setInputCloud(cloud_filter); ne.setInputCloud(cloud_filter); ne.setSearchMethod(tree); ne.setKSearch(stoi(pd.getData("Ksearch"))); ne.compute(*mynormals);
(3)RegionGrowing生长聚类算法对可能是平面的点云进行分割
算法步骤:
1. 算法首先计算所有点的曲率值,并将曲率最小的点作为种子(seeds),开始进行生长
2. 以法线夹角阈值(Angle threshold)作为判断标准,对邻域内的点进行遍历判断 ,符合条件则加入当前点集,不符合则reject,并加入reject点集
3. 以曲率阈值(Curvature threshold)作为判断标准,将邻域内符合条件的点加入到种子队列中
4. 移除当前种子
5. 如果当前种子队列空了,表明当前子区域分割停止,遍历其他种子区域,直到停止整个点云均被遍历完为止生长
参数分析:
1. 参数:MinClusterSize(最小聚类点云数目),MaxClusterSize(最大聚类点云数据)
NumberOfNeighbours(寻找种子seed点最近的点判断是否为同类),SmoothnessThreshold(聚类的法线夹角阈值)
CurvatureThreshold(聚类的曲率阈值,可以直观地将圆柱面等区别开)
2. 对应的代码
ParameterReader pd(ParameterFilePath); pcl::RegionGrowing<PointT, pcl::Normal> reg; pcl::search::KdTree<PointT>::Ptr tree(new pcl::search::KdTree<PointT>); reg.setMinClusterSize(stoi(pd.getData("MinClusterSize"))); reg.setMaxClusterSize(stoi(pd.getData("MaxClusterSize"))); reg.setSearchMethod(tree); reg.setNumberOfNeighbours(stoi(pd.getData("NumberOfNeighbours"))); reg.setInputCloud(CloudFilter); reg.setInputNormals(Normals); reg.setSmoothnessThreshold(stod(pd.getData("SmoothnessThreshold")) / 180.0 * M_PI); reg.setCurvatureThreshold(stod(pd.getData("CurvatureThreshold"))); std::vector <pcl::PointIndices> clusters; reg.extract(clusters); /* wk 添加: 可视化调试 */ pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud_segmented(new pcl::PointCloud<pcl::PointXYZRGB>()); cloud_segmented = reg.getColoredCloud(); pcl::visualization::CloudViewer viewer("Cluster viewer"); viewer.showCloud(cloud_segmented); while (!viewer.wasStopped()) { } /* wk 添加: 可视化调试 */
(4)SACSegmentation 利用RANSAC算法对平面点云进行分割并拟合
1. 参数:MaxIterations(最大迭代次数),threshold(距离阈值,判断点是否为当前拟合平面的内点,理论上该值越大平面越粗糙)
2. 代码
/*RanSAC拟合平面,并将平面内点分割出来*/ pcl::SACSegmentation<PointT> seg; pcl::PointIndices::Ptr inliers(new pcl::PointIndices); pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients); seg.setOptimizeCoefficients(true); seg.setModelType(pcl::SACMODEL_PLANE); seg.setMethodType(pcl::SAC_RANSAC); seg.setMaxIterations(stoi(pd.getData("Maxci"))); seg.setDistanceThreshold(stod(pd.getData("threshold"))); seg.setInputCloud(cloud); seg.segment(*inliers, *coefficients); // 分割内点,另存 pcl::ExtractIndices<PointT> extract; PointCloudPtr cloud_plane(new pointCloud); extract.setInputCloud(cloud); extract.setIndices(inliers); extract.setNegative(false); extract.filter(*cloud_plane);
3 部分效果图展示
(1)原图

(2)RegionGrowing分割效果图

4 算法的局限性
区域生长算法分割平面步骤及问题分析:针对分辨率低、扫描质量比较差的点云,如图所示,算法无法将破碎、扭曲的大块区域识别为平面区域,只能将这部分点判断为非平面点集舍弃掉。

区域生长算法通常在分割细节处比较平滑的平面点云时,具有相当的优势。但是在处理“波纹”状点云时,就没什么优势了。而实际扫描点云的细节部位很多时候是如上图所示的,为了将曲率较小的曲面区别开,而调低平滑及曲率阈值时,这类从大视角上看明显是平面的点云会被rejected,从而导致分割失效。如下图所示,RegionGrowing更适合处理接近理想点云的这类点云,而不适合处理波动起伏状的、扫描精度较差的点云。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· AI与.NET技术实操系列(二):开始使用ML.NET
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
· 【自荐】一款简洁、开源的在线白板工具 Drawnix
· 园子的第一款AI主题卫衣上架——"HELLO! HOW CAN I ASSIST YOU TODAY
· Docker 太简单,K8s 太复杂?w7panel 让容器管理更轻松!