[ROS学习]10. 服务端Server的编程实现
参考笔记:【ROS学习笔记】10.服务端Server的编程实现
内容参考:基于B站ROS公开课:【古月居】古月·ROS入门21讲
基于Ubuntu 20.04.1、Noetic版本
本节说明
上一讲学习了基于Service模式的客户端Client的编程实现。
这节来实现另一例基于Service模式的程序,来学习服务端Service的编程实现。
我们先看模型图。
1 模型图
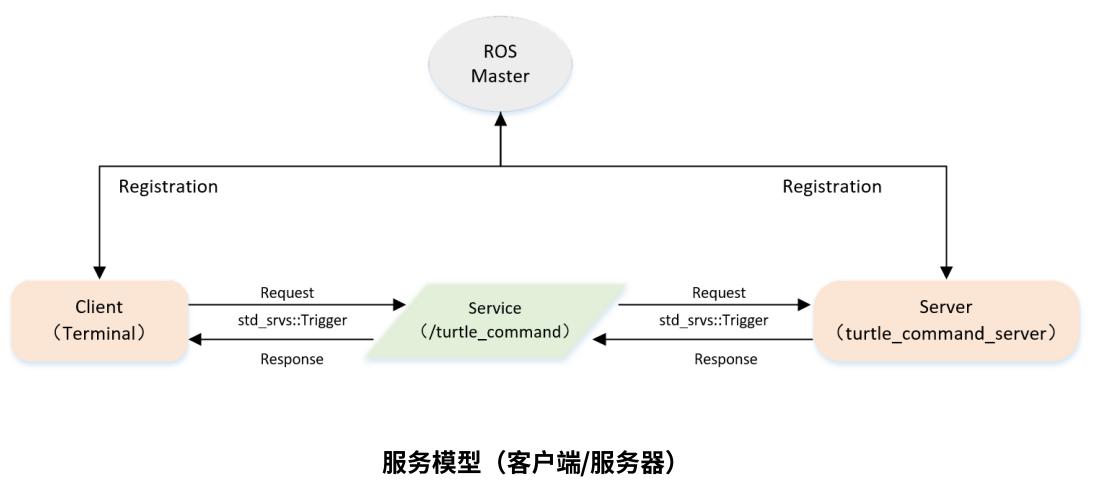
Server端本身是进行模拟海龟运动的命令端,它的实现是通过给海龟发送速度(Twist)的指令,来控制海龟运动(本身通过Topic实现)。
Client端相当于海龟运动的开关,其发布Request来控制Server端。
通过自定义名为 /turtle_command 的Service实现,中间传输消息的数据类型为std_srvs::Trigger(一种针对服务标准std_srvs下的数据定义)来通信。Trigger意为触发,通过Trigger信号来触发Server端的运动指令。
Server端接收这个Trigger信号后,可控制其是否要给海龟发送Twist指令,同时给Client发送Response反馈告诉它海龟的运动状态。
ROS Master负责管理节点。
所以本例既有Server端自己的Topic模式控制海龟运动,又有S/C之间的Service模式,包含两种通信模式的实现
2 创建功能包
本节还是使用上节创建的 learning_service 包来进行代码存放和编译。
3 创建代码并编译运行(C++)
如何实现一个服务器端Server
- 初始化ROS
- 创建一个Server实例
- 循环等待服务请求,进入回调函数
- 在回调函数中完成服务功能的处理,并反馈应答数据
创建服务端Server代码
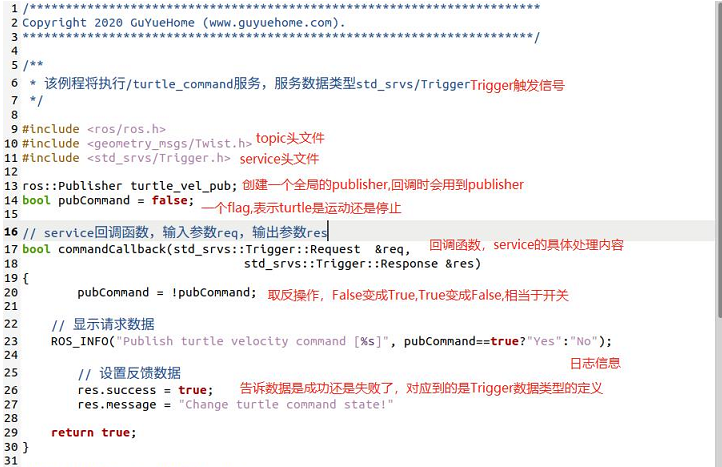

其中在回调函数中给Client端的反馈数据res是与Trigger相对应的,我们可以查看一下Trigger的数据结构。可以使用rossrv指令查看service中的数据类型:
查询结果中:---是一个分界线,上面是request相关的数据结构;下面是response相关的数据结构:success、message都在代码中体现了。
rossrv show std_srvs/Trigger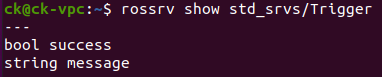
编译
先配置CMakeLists.txt编译规则:
- 设置需要编译的代码和生成的可执行文件
add_executable; - 设置链接库
target_link_libraries;
add_executable(turtle_command_server src/turtle_command_server.cpp)
target_link_libraries(turtle_command_server ${catkin_LIBRARIES})然后进行编译:
cd ~/catkin_ws
catkin_make运行
默认已经source devel/setup.bash,接着运行。
roscore
rosrun turtlesim turtlesim_node
rosrun learning_service turtle_command_server 
接着我们使用rosservice call ...请求海龟动起来,再打开一个终端。
(输入完 /turtle_command 后敲个空格再用Tab键可自动填充空指令内容, /turtle_command是程序里写好的service名字)
rosservice call /turtle_command "{}"可以看到海龟动起来了!!

再输入一遍rosservice call /turtle_command "{}"海龟就会停下来。
这和程序内容有关,因为有一个flag内容,指令相当于开关。
4 创建代码并编译运行(Python)
如何实现一个服务器端Server
- 初始化ROS
- 创建一个Server实例
- 循环等待服务请求,进入回调函数
- 在回调函数中完成服务功能的处理,并反馈应答数据
创建服务端Server代码
注意在C++里我们使用了spinOnce来查看一次队列,判断是否有消息入队;在Python中没有这个功能,因此这里使用了多线程思路。
参考笔记中用红字标上了代码讲解。绿字是Python3的修改点。
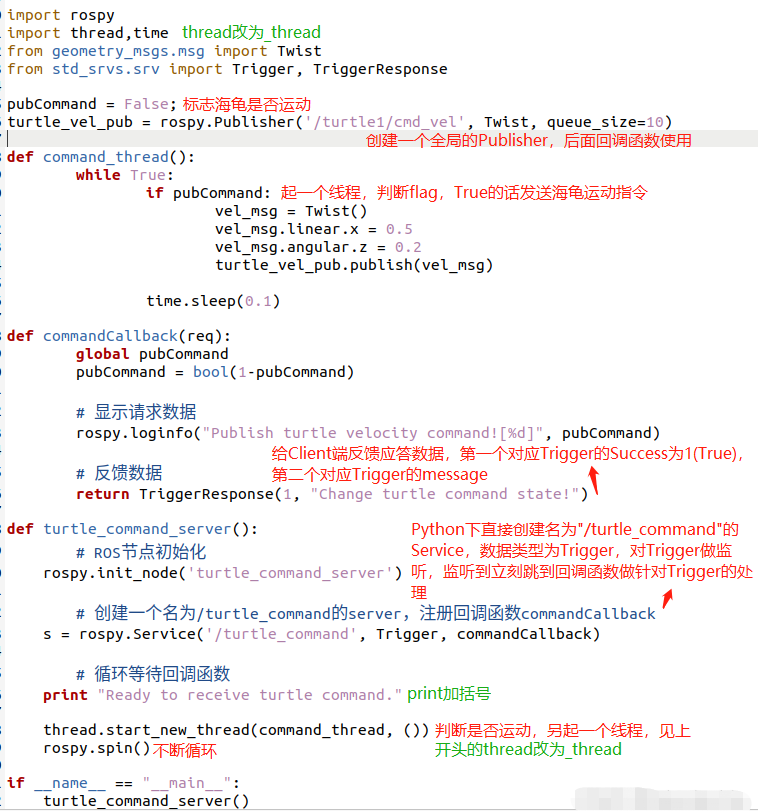
在代码36行解释中,回调函数中给Client端的反馈数据是与Trigger相对应的,我们可以查看一下Trigger的数据结构。
最后右击py文件→属性,打开执行权限。
编译
运行
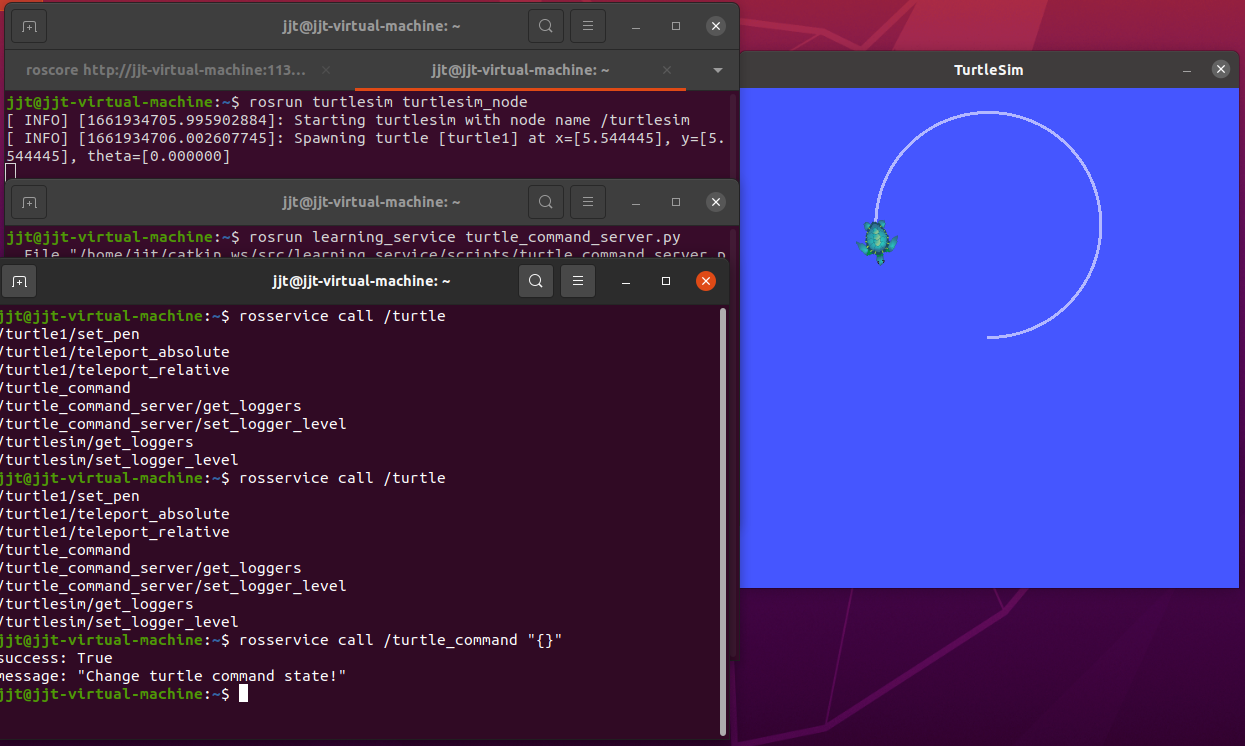
roscore
rosrun turtlesim turtlesim_node
rosrun learning_service turtle_command_server.py服务端启动。
接着我们使用rosservice call ...请求海龟动起来,再打开一个终端。
(输入完 /turtle_command 后敲个空格再用Tab键可自动填充空指令内容)
rosservice call /turtle_command "{}"同样动起来了!!!
再输入一遍rosservice call /turtle_command "{}"海龟就会停下来。
5 再看服务数据srv
在代码中,回调函数中给Client端的反馈数据是与Trigger相对应的,这个对应是指与它的response部分对应。

这指的是破折号上方是定义Request部分,下方是定义Response部分。
在Trigger中,没有Request部分,即一个空内容的Request,这也解释了我们不需要在让海龟运动时给 /turtle_command 传内容,直接传个空值 “{}” 就可以了(rosservice call /turtle_command "{}")。
这部分为下一节做铺垫,下一节将讲自定义服务数据srv。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号