[ROS学习]4. ROS命令行工具
笔记参考:【ROS学习笔记】4.玩转小海龟——ROS命令行工具
基于B站ROS公开课:【古月居】古月·ROS入门21讲
基于Ubuntu 20.04.1、Noetic版本
1 回顾第一个小海龟程序
打开小海龟程序:
终端,启动ROS Master:
roscore终端2(Ctrl+Shift+T新建标签页,避免过多窗口),启动小海龟仿真器:
(输入rosrun turtlesim,敲两下Tab健可查看该命令下有哪些功能)
rosrun turtlesim turtlesim_node终端3,启动海龟控制节点:
rosrun turtlesim turtle_teleop_key
2 查看系统中的计算图:rqt_graph
新建终端标签页:
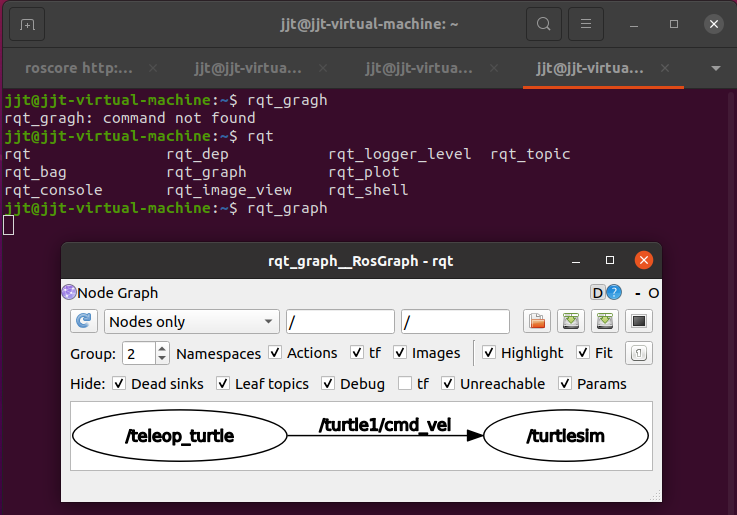
可展示系统中运行的计算图rqt_graph
rqt_graph可以清晰地了解系统节点间通信的部分信息。
teleop_turtle节点(键盘控制节点)通过/turtle1/cmd_vel(topic)向turtlesim节点(海归仿真器节点)发出消息,使得小海龟移动。
3 rosnode
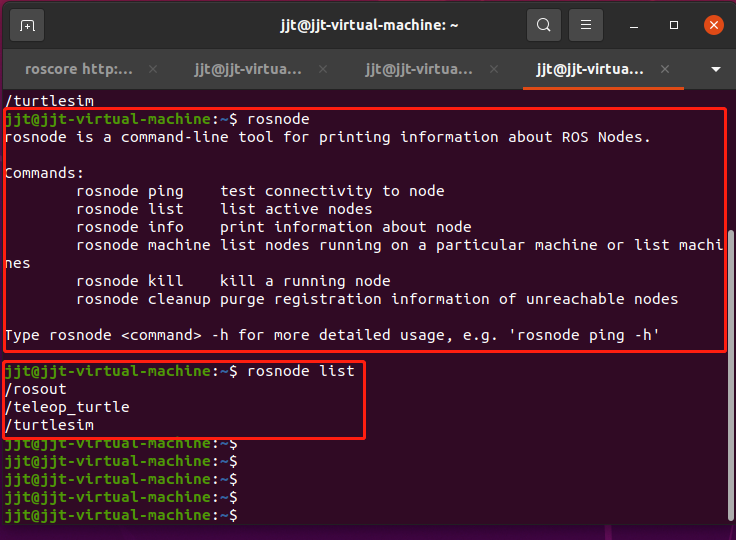
3.1显示节点列表:rosnode list
rosnode可以参考有哪些命令 rosnode list将当前系统中所有节点都显示出来的指令
3.2查看节点信息:rosnode info
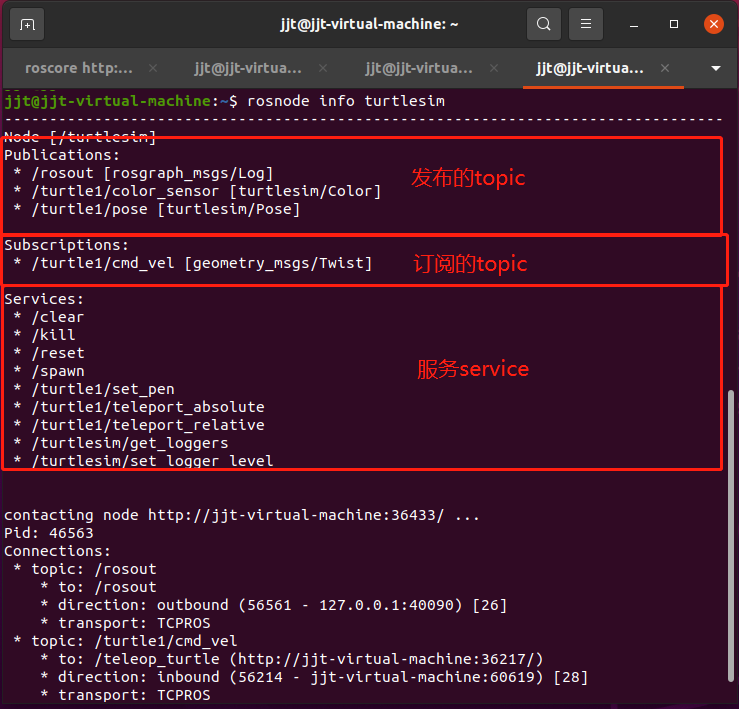
查看节点的具体信息:rosnode info /节点名
我们查看海龟仿真器节点/turtlesim的信息:
可以看到海龟仿真器节点/turtlesim有一些发布和订阅的topic,也有一些service。
4 rostopic
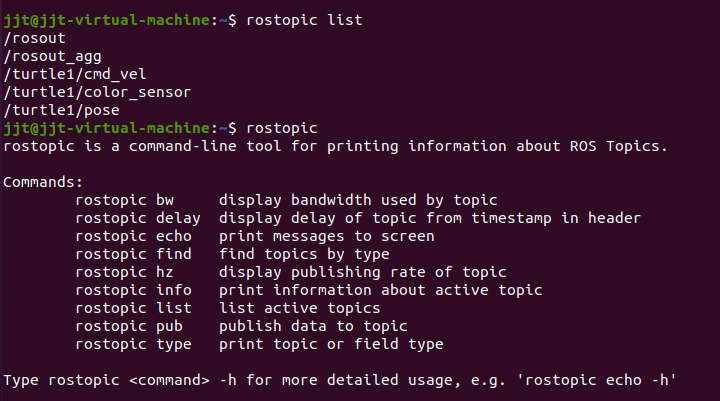
4.1显示topic列表:rostopic and rostopic list
4.2(命令)手动发布数据给topic:rostopic pub
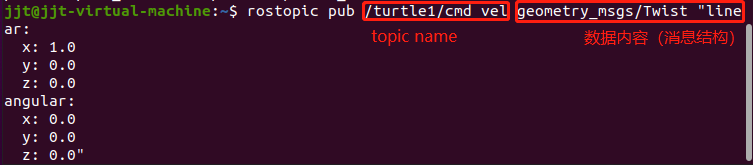
我们来手动发布数据给topic来控制海龟移动,使用rostopic pubrqt_graph中我们看到小海龟是通过/cmd_vel这个topic进行发布信息而移动的,这次我们通过手动publish数据给这个topic来控制小海龟移动。
格式:rostopic pub (参数) 话题名 消息数据结构 “具体数据”
例,我们输入:(我们可以使用Tab键让我们自动填充数据,使用方向键←→移动(不能使用↑↓键)到指定位置修改数据,比如我们把x的0.0改成了1.0),平移单位(m),旋转相关单位(弧度)
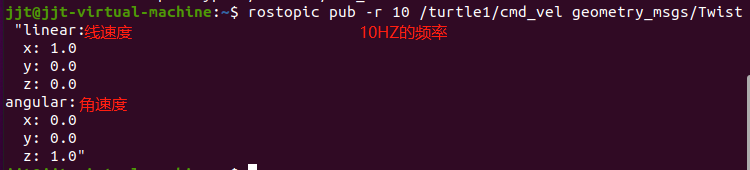
小海龟沿着正前方向移动了1单位,我们再使用参数-r 5(一秒钟发布5从的进行循环),小海龟就撞上了南墙。Ctrl+C就可以终止。z轴为垂直于屏幕的方向
5 rosmsg
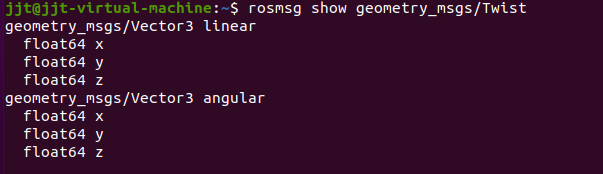
查看消息数据结构
上例我们使用了消息数据结构定义了一个消息传给topic,我们可以查看有哪些消息数据结构。
查看消息数据结构使用:rosmsg show …
在输入过程中,我们可以勤使用Tab键查看或填充内容
6 使用service通信方式:rosservice
上例我们使用了向topic传msg来控制节点,这次我们试试第二种通信方式service。
service中服务端是仿真器;客户端是终端
查看服务列表:rosservice list
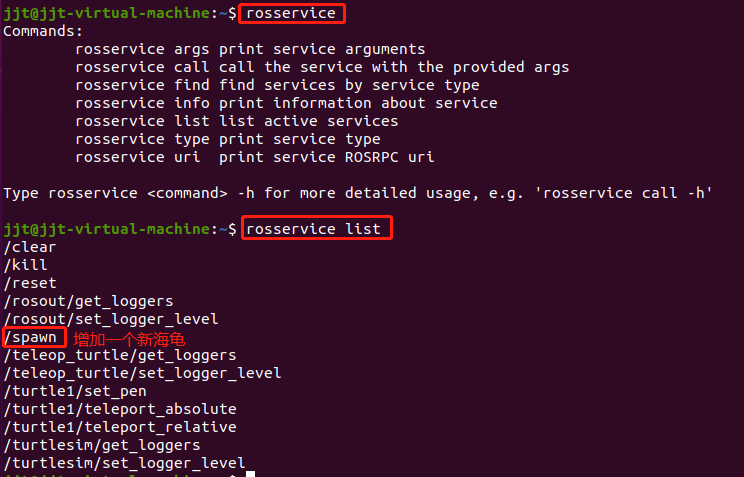
手动通过服务来进行操作
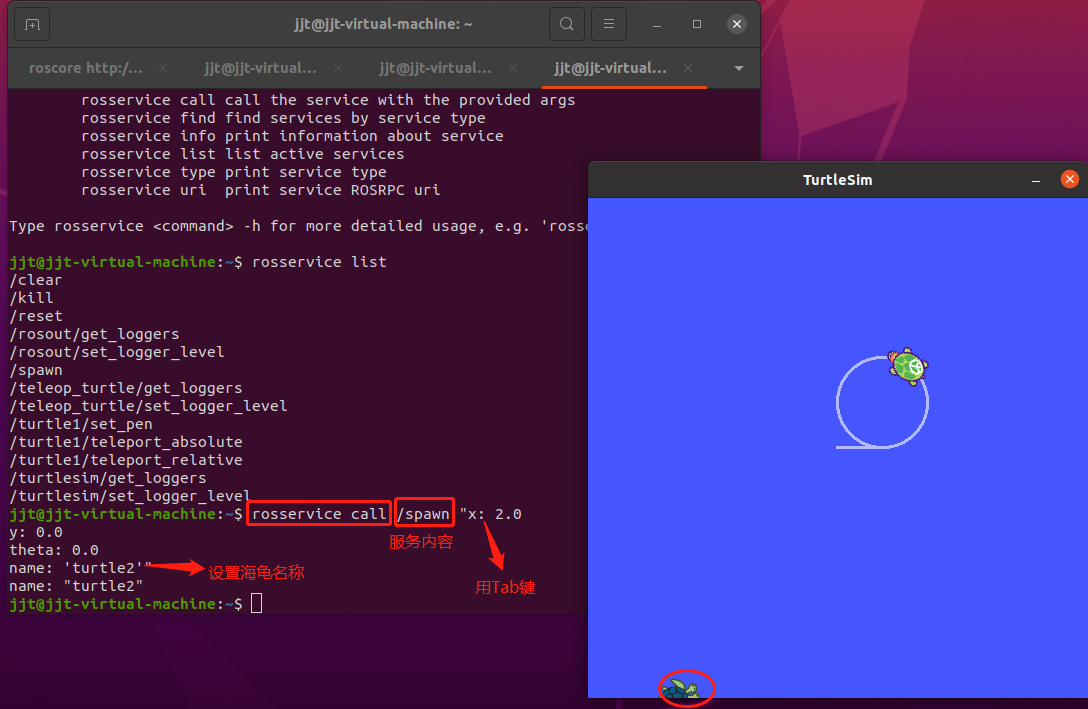
这次我们通过人工产生服务(service)来诞生一只新海龟,使用rosservice call /spawn …
在服务列表中,有个/spawn服务,可以产生一只新的海龟。
格式:rosservice call (参数) 服务名 “具体数据”
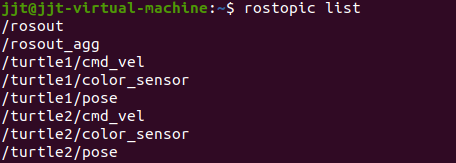
这时我们再输入rostopic list,可以看到turtle2已经在topic里了。
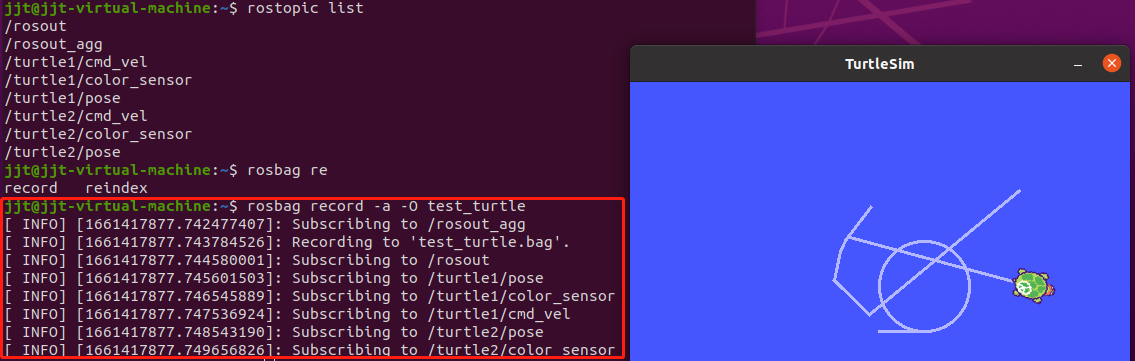
7 话题记录和复现:rosbag
试想我们尝试让海龟以我们指定的路径移动了一回,我们想要把它 记录下来,拷贝到自己的实验室再复现出来,我们就可以使用话题记录功能。
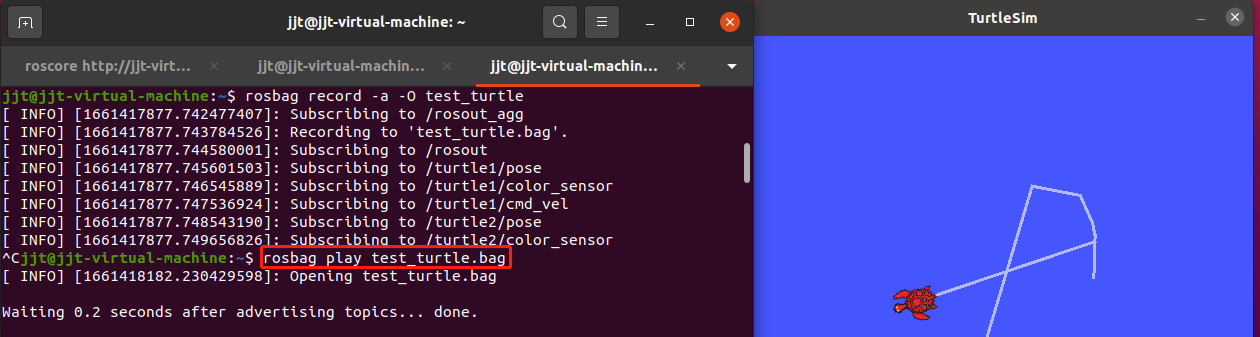
常用命令:rosbag record -a -O 文件名-a:all;-O: 压缩
比如我们使用之前打开的键盘操作器让海龟移动一圈并记录下来:
(1)打开新终端输入rosbag record -a -O cmd_record
这样就开始记录了:
(2)移动一下后,到记录界面按Ctrl+C停止;
文件就记录在了这里:
(3)接下去关闭所有打开的ros节点,查看。
重新开启roscore,开启海龟节点rosrun turtlesim turtlesim_node
这时我们输入 rosbag play 文件名就可以复现之前的移动啦!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号