[ROS学习]2. ROS系统的安装
笔记来自大佬笔记


1 添加ROS软件源
ROS它有自己的软件源,用来对系统做维护等。所以我们需要将ROS软件源添加到系统软件源中
打开终端(ctrl+alt+T),输入
小技巧:使用Ctrl+Shift+V粘贴到命令提示符中
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2 添加密钥
很多ROS包下载之前需要对照一下密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3 安装ROS
更新软件索引(可能会失败,失败的话换手机热点或别的方法),就是将ROS源中包的路径更新到系统中:
sudo apt update

我们选择安装桌面完整版(共668mb):
sudo apt install ros-noetic-desktop-full
若发生某几个包下载失败,可以输入sudo apt-get upgrade运行后,再运行一遍sudo apt install ros-noetic-desktop-full
4 初始化Rosdep(这一步可以省略)
此外Ubuntu 20.04 无需”初始化rosdep“这一网上教程经常提到的步骤,官方教程里也没有。
5 设置环境变量
环境变量大概的意思就是让系统去查找某个命令,这个命令在哪个位置,需要使用环境变量来做引导。
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc source ~/.bashrc
.bashrc是一个终端配准文件,通过这个配准文件,可以将之后在终端输入的ROS命令找到它的位置
source是ubuntu中用来运行脚本的命令
关于设置环境变量
在lunix中,先需要source一下bash文件来运行脚本。
在这里,我们需要运行这个bash文件才能让系统加载ros,所以需要运行source /opt/ros/noetic/setup.bash来加载ros。
但是每次加载很麻烦,所以配置一个环境变量,让终端每次启动都能加载这个bash,如何实现呢?在用户根目录下,有个隐藏文件:.bashrc。
打开用户根目录,按Ctrl+H可显示隐藏文件,就可以打开.bashrc了。

我们可以看到这句话已经加在了文件的末尾。
而上面echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc这句话的作用就是指将source /opt/ros/noetic/setup.bash添加到环境变量文件.bashrc中。我
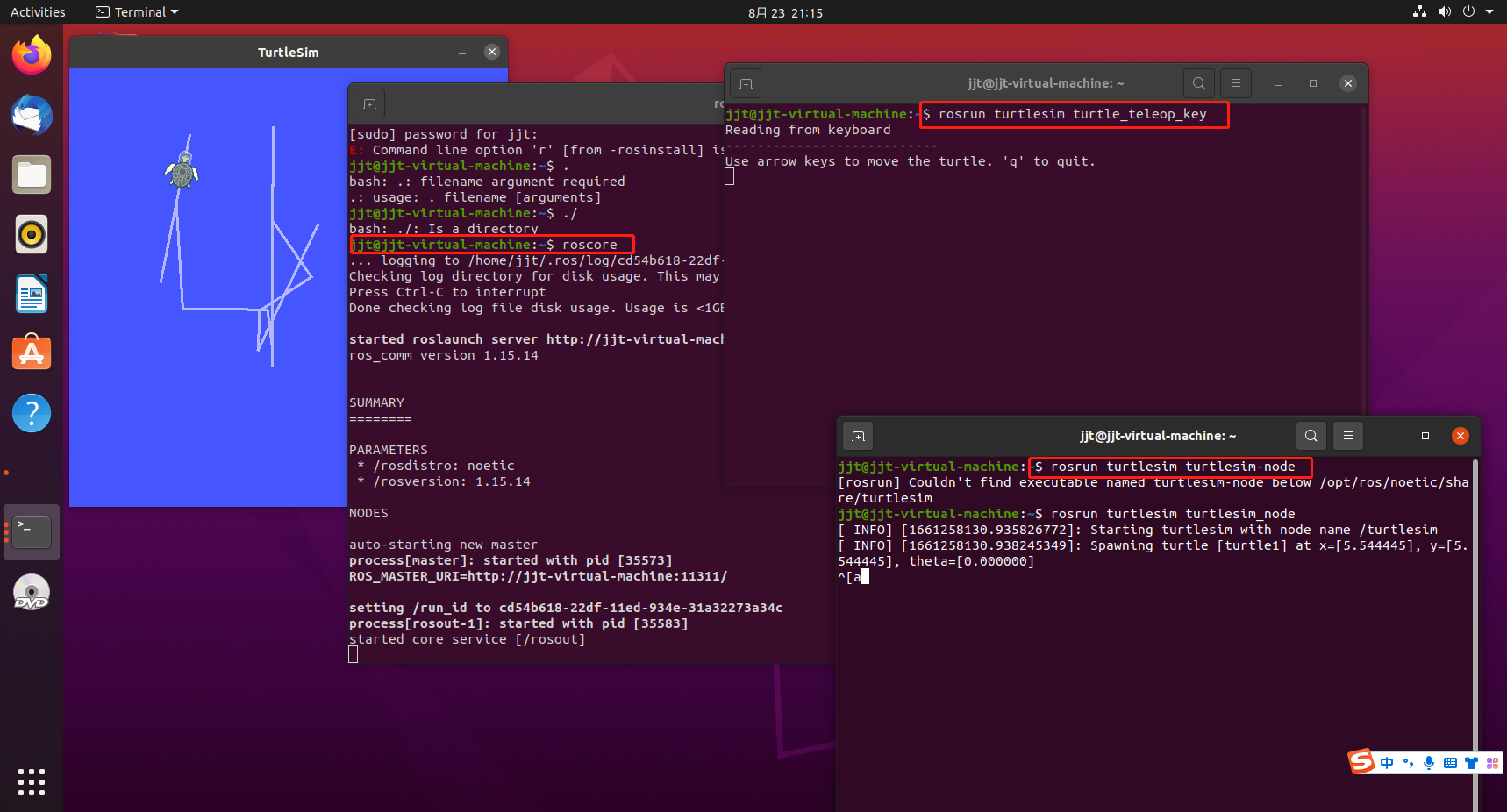
6 启动第一个小程序
启动ROS Master,在终端中输入:
roscore
再打开一个终端窗口,启动小海龟仿真器:
rosrun turtlesim turtlesim_node
这时会打开一个新窗口,新建了一个小海龟仿真器界面。
再打开一个终端窗口,启动海龟控制节点:
rosrun turtlesim turtle_teleop_key
现在就可以通过方向键控制小海龟的转向和前进了!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号