步进电机控制
1.1步进电机的介绍
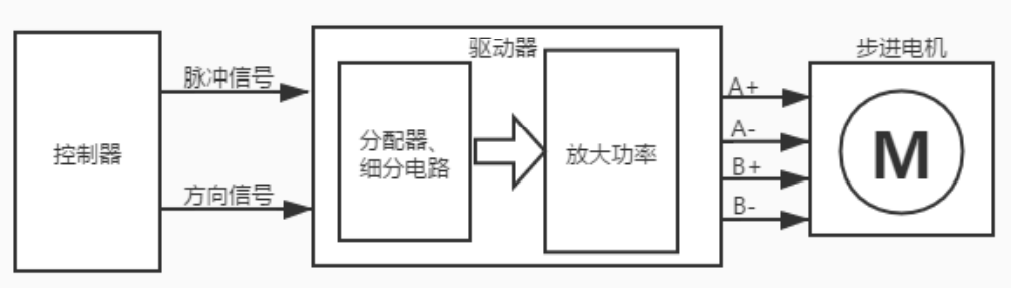
步进电机的控制是通过程序产生控制脉冲,驱动硬件电路。
在不超载的情况下电机的转速和停止位置只取决于脉冲信号的频率和数量;
步进电机的脉冲与步进旋转的角度成正比,脉冲的频率与步进的转速成正比,所以可以很好的从源头控制信号的输出;且步进电机只有周期性的误差,使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
1.2工作原理
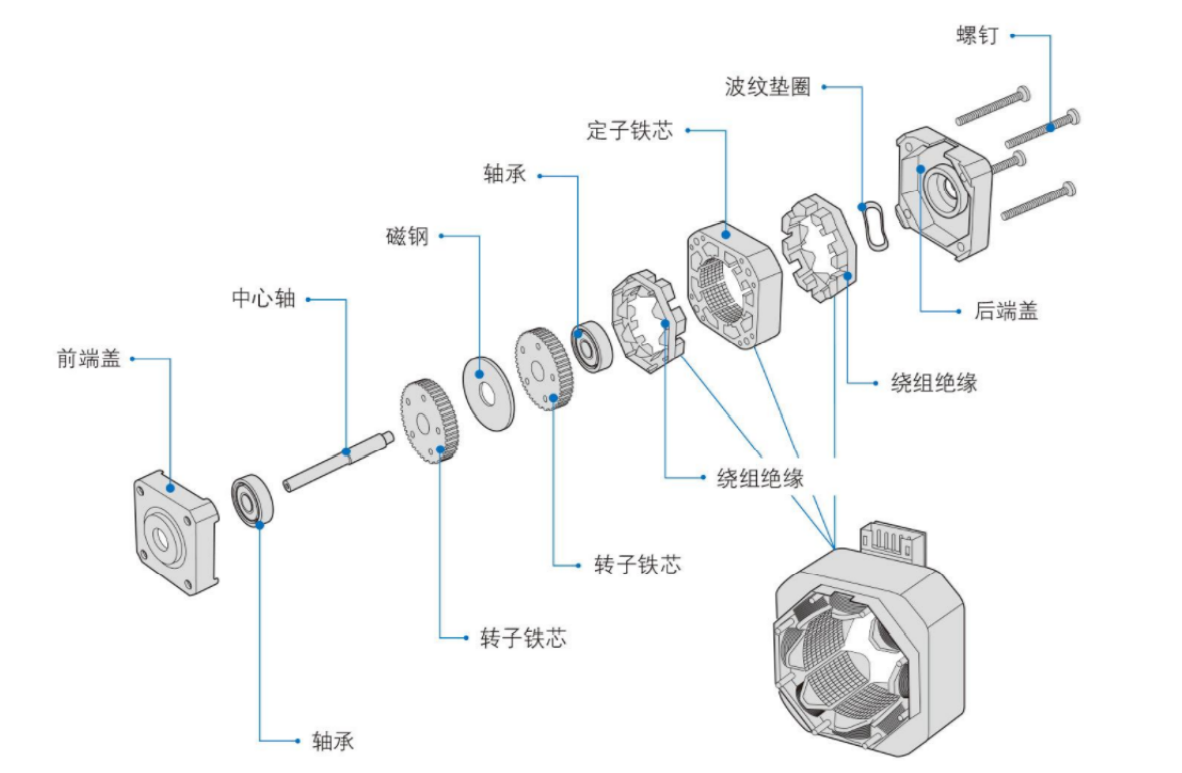
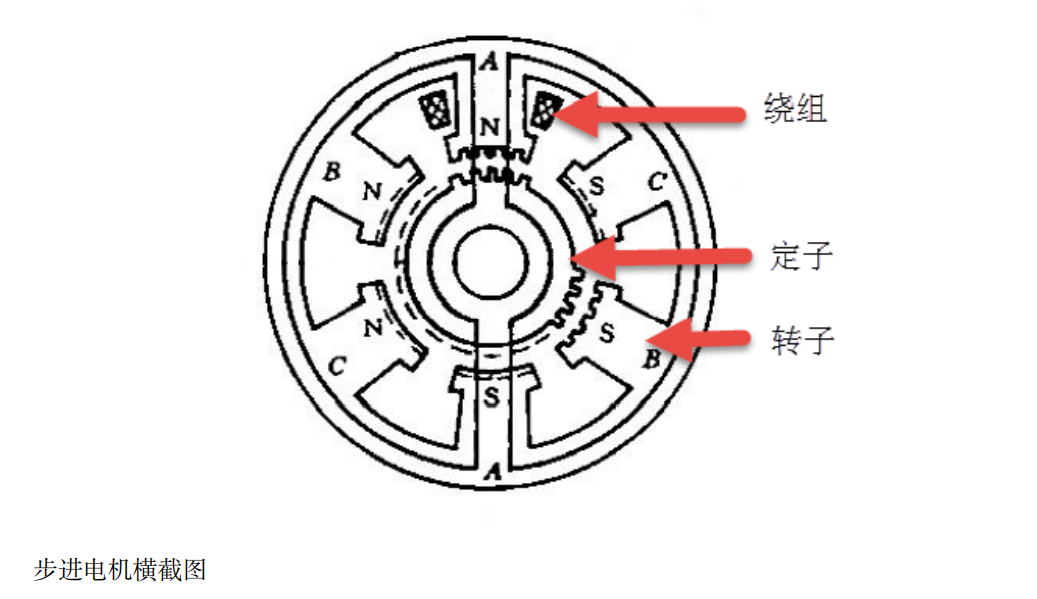
通常步进电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生一矢量磁场。磁场会带动转子旋转一定的角度,使得转子的一对磁场方向与定子的磁场方向一致。当定子的矢量磁场旋转一个角度。转子也随着该磁场转步距角。
每输入一个电脉冲,电动机转动一个角度前进一步。
它输出的角位移与输入的脉冲数成正比、转速与脉冲频率成正比。
改变绕组通电的顺序,电机就会反转。
所以可用控制脉冲数量、频率及电动机各相绕组的通电顺序来控制步进电机的转动。
1.3静态指标
*相数︰步进电机中线圈的组数,相数决定步距角,两相步进电机步距角为1.8°,三相的步进电机步距角为1.5°,相数越多的步进电机,其步距角就越小。
*拍数︰完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A。
*步距角:一个脉冲信号所对应的电机转动的角度,可以简单理解为一个脉冲信号驱动的角度,电机上都有写,一般42步进电机的步距角为1.8°
*定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)。
*静转矩:电机在额定静态电压作用下,电机不作旋转运动时,电机转轴的锁定力矩。此力矩是衡量电机体积的标准,与驱动电压及驱动电源等无关。
1.4动态指标
·步距角精度︰步进电机转动一个步距角度的理论值与实际值的误差。用百分比表示∶误差/步距角*100%。
·失步:电机运转时运转的步数,不等于理论上的步数。也可以叫做丢步,一般都是因负载太大或者是频率过快。
·失调角︰转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。
·最大空载起动频率:在不加负载的情况下,能够直接起动的最大频率。·最大空载的运行频率:电机不带负载的最高转速频率。
·运行转矩特性︰电机的动态力矩取决于电机运行时的平均电流(而非静态电流),平均电流越大,电机输出力矩越大,即电机的频率特性越硬。
·电机正反转控制:通过改变通电顺序而改变电机的正反转。
1.5主要特点
1.步进电机的精度大概为步距角的3-5%,且不会积累
2.步进电机的外表允许的最高温度:一般步进电机会因外表温度过高而产生磁性减小,从而会导致力矩较小,一般来说磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200
度以上,所以步进电机外表温度在摄氏80-90度完全正常。
3.步进电机的转矩与速度成反比,速度越快力矩越小。
4.低速时步进电机可以正常启动,高速时不会启动,并伴有啸叫声。步进电机的空载启动频率是固定的,如果高于这个频率电机不能被启动并且会产生丢步或者堵转。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号