


一、基本信息
http://www.alubi.cn/lpms-b2/
安装ros教程
http://wiki.ros.org/lpms_imu
https://lp-research.com/ros-and-lp-research-imus-simple/
二、使用方法
在system setting中打开蓝牙,连接IMU。
rosrun rqt_plot rqt_plot & rosrun lpms_imu lpms_imu_node _sensor_model:="LPMSB2-9BA395" _port:="00:04:3E:9B:A3:95"
若不知道_sensor_model和_port两个参数,则需要在windows下安装openMAT,蓝牙连接IMU后,即可读取这两个参数值。
在rqt_plot中输入要查看的topic名称,即可查看。
三、IMU滤波操作
http://wiki.ros.org/imu_complementary_filter
四、 使用Allan标定法标定IMU随机误差
IMU的随机误差包括加速度计和陀螺仪的高斯白噪声和bias
该开源工具包利用Allan曲线,根据输入的IMU读数,输出IMU的高斯白噪声和角度随机游走。
https://github.com/gaowenliang/imu_utils
https://github.com/rpng/kalibr_allan
注意:Allan曲线标定的结果是连续随机误差,需要进一步转换为离散随机误差.因为使用过程中一直读取IMU的离散读数.
如何理解Allan曲线请参看
https://github.com/XinLiGH/GyroAllan
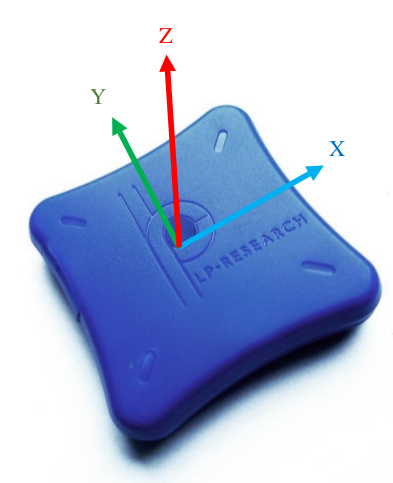
五、IMU的测量模型
加速度计的测量模型
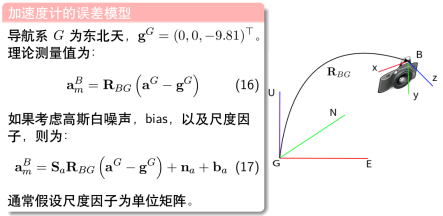
IMU有东北天坐标系(ENU)和北东地(NED)两种坐标系设置。
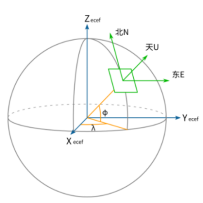
以东北天坐标系为例,惯性系下重力加速度读数 g = (0, 0, -9.81)T.
静止时,
a = 0; am = -g
自由落体运动,
a = g; am = 0
五、IMU和lidar联合标定
1)直接联合标定
阿波罗:https://github.com/ApolloAuto/apollo/blob/master/docs/specs/apollo_lidar_imu_calibration_guide.md
苏黎世理工:https://github.com/ethz-asl/lidar_align
2)相机和lidar联合标定,相机和IMU联合标定,通过链式计算获取lidar和IMU外参

