

实验五、磁盘调度算法的实现
一、实验目的
实验程序模拟先来先服务FCFS,最短寻道时间优先SSTF,SCAN和循环SCAN算法的工作过程。假设有n个磁道号所组成的磁道访问序列,给定开始磁道号m和磁头移动的方向(正向或者反向),分别利用不同的磁盘调度算法访问磁道序列,给出每一次访问的磁头移动距离,计算每种算法的平均寻道长度,本程序采用随机数来产生磁道数。
二、实验要求
算法所需的各种参数由输入产生(手工输入或者随机数产生)。最后的结果要求是在运行四种算法的程序后,能够输出调度过程、平均寻道长度的正确结果。
三、实验说明
(1) 先来先服务.(FCFS):
这是一种简单的磁盘调度算法。它根据进程请求访问磁盘的先后次序进行调度。此算法的优点是公平、简单,且每个进程的请求都能依次得到处理,不会出现某一进程的请求长期得不到满足的情况。但此算法由于未对寻道进行优化,致使平均寻道时间可能较长。
(2) 最短寻道时间优先(SSTF):
该算法选择这样的进程,其要求访问的磁道与当前磁头所在的磁道距离最近,以使每次的寻道时间最短,但这种调度算法却不能保证平均寻道时间最短。
(3) 扫描算法(SCAN):
SCAN算法不仅考虑到欲访问的磁道与当前磁道的距离,更优先考虑的是磁头的当前移动方向。例如,当磁头正在自里向外移动时,SCAN算法所选择的下一个访问对象应是其欲访问的磁道既在当前磁道之外,又是距离最近的。这样自里向外地访问,直到再无更外的磁道需要访问才将磁臂换向,自外向里移动。这时,同样也是每次选择这样的进程来调度,即其要访问的磁道,在当前磁道之内,从而避免了饥饿现象的出现。由于这种算法中磁头移动的规律颇似电梯的运行,故又称为电梯调度算法。
(4)循环扫描算法(CSCAN)
CSCAN算法是对扫描算法的改进。如果对磁道的访问请求是均匀分布的,当磁头到达磁盘的一端,并反向运动时落在磁头之后的访问请求相对较少。这是由于这些磁道刚被处理,而磁盘另一端的请求密度相当高,且这些访问请求等待的时间较长,为了解决这种情况,循环扫描算法规定磁头单向移动。例如,只自里向外移动,当磁头移到最外的被访问磁道时,磁头立即返回到最里的欲访磁道,即将最小磁道号紧接着最大磁道号构成循环,进行扫描
本系统划分为四个模块:先来先服务算法模块void FCFS(int array[],int m)、最短寻道时间优先算法模块void SSTF(int array[],int m)、扫描算法模块void SCAN(int array[],int m)、循环扫描模块void CSCAN (int Han,int DiscL[])。
系统模块图
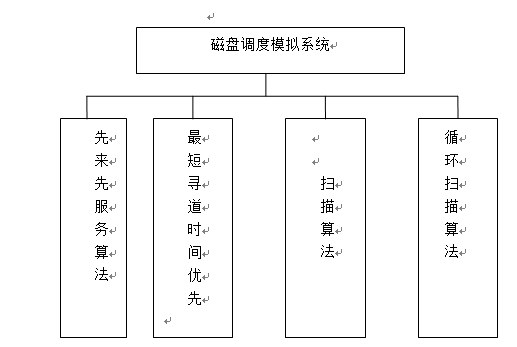
1 先来先服务算法模块:void FCFS(int array[],int m)
输入磁道号,按先来先服务的策略输出磁盘请求序列,求平均寻道长度,输出移动平均磁道数。
2 最短寻道时间优先算法模块:void SSTF(int array[],int m)
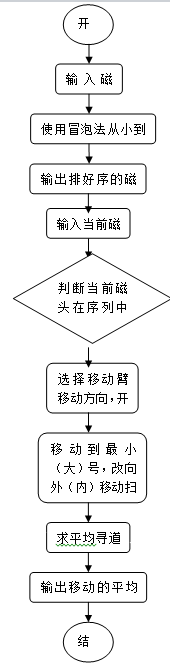
将磁道号用冒泡法从小到大排序,输出排好序的磁道序列,输入当前磁道号,根据前磁道在已排的序列中的位置,选择扫描的顺序,求出平均寻道长度,输出移动的平均磁道数。
3扫描算法模块:void SCAN(int array[],int m)
将磁道号用冒泡法从小到大排序,输出排好序的序列,输入当前磁道号,选择移动臂的移动方向,根据当前磁道在已排的序列中的位置,选择扫描的顺序,求出平均寻道长度,输出移动的平均磁道数。
4 循环扫描算法模块:void CSCAN(int array[],int m)
将磁道号用冒泡法从小到大排序,输出排好序的序列,输入当前磁道号,规定移动臂单向反复的从内向外移动,根据当前磁道在已排的序列中的位置,选择扫描的顺序,求出平均寻道长度,输出移动的平均磁道数。
1、先来先服务(FCFS)
这是一种简单的磁盘调度算法。它根据进程请求访问磁盘的先后次序进行调度。此算法的优点是公平、简单,且每个进程的请求都能依次得到处理,不会出现某一进程的请求长期得不到满足的情况。但此算法由于未对寻道进行优化,致使平均寻道时间可能较长。
实现函数:void FCFS(int Han,int DiscL[])
先来先服务算法(FCFS)流程图:

2、最短寻道时间优先(SSTF)
该算法选择这样的进程,其要求访问的磁道与当前磁头所在的磁道距离最近,以使每次的寻道时间最短,但这种调度算法却不能保证平均寻道时间最短。
实现函数:void SSTF(int Han,int DiscL[])
最短寻道时间优先流程图:

3、扫描算法(SCAN)
SCAN算法不仅考虑到欲访问的磁道与当前磁道的距离,更优先考虑的是磁头的当前移动方向。例如,当磁头正在自里向外移动时,SCAN算法所选择的下一个访问对象应是其欲访问的磁道既在当前磁道之外,又是距离最近的。这样自里向外地访问,直到再无更外的磁道需要访问才将磁臂换向,自外向里移动。这时,同样也是每次选择这样的进程来调度,即其要访问的磁道,在当前磁道之内,从而避免了饥饿现象的出现。由于这种算法中磁头移动的规律颇似电梯的运行,故又称为电梯调度算法。
实现函数:int SCAN(int Han,int DiscL[],int x,int y)
(4)循环扫描算法(CSCAN)
CSCAN算法在SCAN算法的基础上规定了刺头单向移动,减少了进程的请求延迟。例如:只是自理向外移动,当磁头移到最外的磁道并访问后,磁头立即返回到最里的欲访问磁道,亦即将最小的磁道号紧接着最大的磁道号构成循环,进行循环扫描。
实现函数:void CSCAN(int Han,int DiscL[])

源代码:

// 123123123.cpp : 定义控制台应用程序的入口点。 // #include "stdafx.h" #include "stdio.h" #include "stdlib.h" void CopyL(int Sour[],int Dist[] ,int x); //数组Sour复制到数组Dist,复制到x个数 void SetDI(int DiscL[]); //随机生成磁道数 void Print(int Pri[],int x); //打印输出数组Pri void DelInq(int Sour[],int x,int y); //数组Sour把x位置的数删除,并把y前面的数向前移动,y后的数保持不变(即会出现2个y) void FCFS(int Han,int DiscL[]); //先来先服务算法(FCFS) void SSTF(int Han,int DiscL[]); //最短寻道时间优先算法(SSTF) int SCAN(int Han,int DiscL[],int x,int y); //扫描算法(SCAN) void CSCAN(int Han,int DiscL[]); //循环扫描算法(CSCAN) void N_Step_SCAN(int Han1,int DiscL[]); //N步扫描算法(NStepScan) void PaiXu(); //寻道长度由低到高排序 void Pri(); int NAll=0; int Best[5][2]; //用作寻道长度由低到高排序时存放的数组 int Limit=0; //输入寻找的范围磁道数i int Jage; float Aver=0; int main() { int i; int DiscLine[10]; //声明准备要生成的随机磁道号的数组 int Hand; //磁道数 int Con=1; int n; while(Con==1) { Jage=0; printf(" 请输入初始的磁道数(0<n<65536):"); scanf("%d",&Hand); printf(" + 输入寻找的范围:"); scanf("%d",&Limit); if(Limit<=0||Limit>65536){ printf("超出范围!"); } else{ printf(" ╭═══════════════╮ \n"); printf(" ║ 操作系统课程实验 ║ \n"); printf(" ╭═════┤ 磁盘调度算法 ├═════╮ \n"); printf(" ║ ║ ║ ║ \n"); printf(" ║ ╰═══════════════╯ ║ \n"); printf(" ║ 1.先来先服务算法(FCFS) ║ \n"); printf(" ║ ║ \n"); printf(" ║ 2.最短寻道时间优先算法(SSTF) ║ \n"); printf(" ║ ║ \n"); printf(" ║ 3.扫描算法(SCAN) ║ \n"); printf(" ║ ║ \n"); printf(" ║ 4.循环扫描算法(CSCAN) ║ \n"); printf(" ║ ║ \n"); printf(" ║ ║ \n"); printf(" ║ ╭───────────────────────╮ ║ \n"); printf(" ╰═┤ 请输入你的选择的算法(输入0离开) ├═╯ \n"); printf(" ╰───────────────────────╯ \n"); scanf("%d",&n); if(n==0) exit(0); printf(" "); switch(n) { case 1: SetDI(DiscLine); //随机生成磁道数 FCFS(Hand,DiscLine); //先来先服务算法(FCFS) break; case 2: SetDI(DiscLine); //随机生成磁道数 SSTF(Hand,DiscLine); //最短寻道时间优先算法(SSTF) break; case 3: SetDI(DiscLine); //随机生成磁道数 SCAN(Hand,DiscLine,0,9); //扫描算法(SCAN) break; case 4: SetDI(DiscLine); //随机生成磁道数 CSCAN(Hand,DiscLine); //循环扫描算法(CSCAN) break; } printf(" + 是否继续(按0结束,按1继续)?"); scanf("%5d",&Con); } } } //数组Sour复制到数组Dist,复制到x个数 void CopyL(int Sour[],int Dist[] ,int x) { int i; for(i=0;i<=x;i++) { Dist[i]=Sour[i]; } } //打印输出数组Pri void Print(int Pri[],int x) { int i; for(i=0;i<=x;i++) { printf("%5d",Pri[i]); } } //随机生成磁道数 void SetDI(int DiscL[]) { int i; for(i=0;i<=9;i++) { DiscL[i]=rand()%Limit;//随机生成10个磁道号 } printf("+ 需要寻找的磁道号:"); Print(DiscL,9); //输出随机生成的磁道号 printf(" \n"); } //数组Sour把x位置的数删除,并把y前面的数向前移动,y后的数保持不变(即会出现2个y) void DelInq(int Sour[],int x,int y) { int i; for(i=x;i<y;i++) { Sour[i]=Sour[i+1]; x++; } } //先来先服务算法(FCFS) void FCFS(int Han,int DiscL[]) { int RLine[10]; //将随机生成的磁道数数组Discl[]复制给数组RLine[] int i,k,All,Temp; //Temp是计算移动的磁道距离的临时变量 All=0; //统计全部的磁道数变量 k=9; //限定10个的磁道数 CopyL(DiscL,RLine,9); //复制磁道号到临时数组RLine printf(" + 按照FCFS算法磁道的访问顺序为:"); All=Han-RLine[0]; for(i=0;i<=9;i++) { Temp=RLine[0]-RLine[1];//求出移动磁道数,前一个磁道数减去后一个磁道数得出临时的移动距离 if(Temp<0) Temp=(-Temp);//移动磁道数为负数时,算出相反数作为移动磁道数 printf("%5d",RLine[0]); All=Temp+All;//求全部磁道数的总和 DelInq(RLine,0,k);//每个磁道数向前移动一位 k--; } Best[Jage][1]=All;//Best[][1]存放移动磁道数 Best[Jage][0]=1; //Best[][0]存放算法的序号为:1 Jage++;//排序的序号加1 Aver=((float) All)/10;//求平均寻道次数 printf("\n"); printf(" + 移动磁道数:<%5d> ",All);printf("\n"); printf(" + 平均寻道长度:*%0.2f* \n",Aver);printf("\n"); } //冒泡排序 int* Bubble(int pArr[],int nFirst,int nEnd) { int nTemp=0; for(int i=nFirst;i<nEnd;++i) { for(int j=i;j<nEnd;++j) { if(pArr[i]>pArr[j]) { nTemp=pArr[i]; pArr[i]=pArr[j]; pArr[j]=nTemp; } } } return pArr; } //最短寻道时间优先算法(SSTF) void SSTF(int Han,int DiscL[]) { int temp; int k=1,n=10; int l,r; int i,j,all=0; //将磁道号按递增排序 DiscL=Bubble(DiscL,0,10); printf("\n+ 按照SSTF算法磁道的访问顺序为::"); //判断标志位Han左、右两边的偏移量大小 if(DiscL[n-1]<=Han)//当前磁头位置大于最外围欲访问磁道 { for(i=n-1;i>=0;i--) { printf("%d ",DiscL[i]); } all=Han-DiscL[0]; } else if(DiscL[0]>=Han)//当前磁头位置小于最里欲访问磁道 { for(i=0;i<n;i++) { printf("%d ",DiscL[i]); } all=DiscL[n-1]-Han; } else { while(DiscL[k]<Han)//确定当前磁道在已排的序列中的位置 { k++; } l=k-1;//在磁头位置的前一个欲访问磁道 r=k;//磁头欲访问磁道 while((l>=0)&&(r<n)) { if((Han-DiscL[l])<=(DiscL[r]-Han))//选择离磁头近的磁道 { printf("%d ",DiscL[l]); all+=Han-DiscL[l]; Han=DiscL[l]; l=l-1; } else { printf("%d ",DiscL[r]); all+=DiscL[r]-Han; Han=DiscL[r]; r=r+1; } } if(l=-1)//磁头位置里侧的磁道已访问完 { for(j=r;j<n;j++)//访问磁头位置外侧的磁道 { printf("%d ",DiscL[j]); } all+=DiscL[n-1]-DiscL[0]; } if(r==n)//磁头位置外侧的磁道已访问完 { for(j=k-1;j>-1;j--) //访问磁头位置里侧的磁道 { printf("%d ",DiscL[j]); } all+=DiscL[n-1]-DiscL[0]; } } printf("\n + 移动磁道数:<%5d> \n",all); printf(" + 平均寻道长度:*%0.2f* \n",all/10.0); } //扫描算法(SCAN) int SCAN(int Han,int DiscL[],int x,int y) { int temp; int k=1,n=10; int l,r; int i,j,all=0; DiscL=Bubble(DiscL,x,y); //printf("按递增顺序排好的磁道为:"); //for( i=0;i<n;i++) //{ // printf("%d ",DiscL[i]); //} //以下算法确定磁道访问顺序 if(DiscL[n-1]<=Han) //磁头位置大于最外围欲访问磁道 { for(i=n-1;i>=0;i--) printf("%d ",DiscL[i]); all=Han-DiscL[0]; } else if(DiscL[0]>=Han) //磁头位置小于最里欲访问磁道 { for(i=0;i<n;i++) printf("%d ",DiscL[i]); all=DiscL[n-1]-Han; } else //磁头位置在最里侧磁道与最外侧磁道之间 { int d; while(DiscL[k]<Han) { //确定当前磁道在已排的序列中的位置 k++; } l=k-1;//在磁头位置的前一个欲访问磁道 r=k; //磁头欲访问磁道 printf("\n请输入当前磁头移动的方向 (0 表示向内 ,1表示向外) : "); scanf("%d",&d); //确定磁头访问的方向 printf("按照SCAN算法访问顺序为:"); if(d==0||d==1) { if(d==0) //磁头向内 { for(j=l;j>=0;j--) { printf("%d ",DiscL[j]); } for(j=r;j<n;j++) { printf("%d ",DiscL[j]); } all=Han-2*DiscL[0]+DiscL[n-1]; } if(d==1) //磁头向外 { for(j=r;j<n;j++) { printf("%d ",DiscL[j]); } for(j=l;j>=0;j--) { printf("%d ",DiscL[j]); } all=2*DiscL[n-1]-Han-DiscL[0]; } } else printf("请输入0或1!"); } printf("\n + 移动磁道数:<%5d> \n",all); printf(" + 平均寻道长度:*%0.2f* \n",all/10.0); return 0; } //循环扫描算法(CSCAN) void CSCAN(int Han,int DiscL[]) { int temp; int l,r; int i,j,all=0; int k=1,n=10; //对访问磁道按由小到大顺序排列输出 DiscL=Bubble(DiscL,0,10); //printf("按递增顺序排好的磁道为:"); //for( i=0;i<n;i++) //{ // printf("%d ",DiscL[i]); //} if(DiscL[n-1]<=Han)//磁头位置大于最外围欲访问磁道 { for(i=0;i<n;i++) printf("%d ",DiscL[i]); all=Han-2*DiscL[0]+DiscL[n-1]; } else if(DiscL[0]>=Han)//磁头位置小于最里欲访问磁道 { for(i=0;i<n;i++) printf("%d ",DiscL[i]); all=DiscL[n-1]-Han; } else //磁头位置在最里侧磁道与最外侧磁道之间 { int d; while(DiscL[k]<Han) { k++; } l=k-1;//在磁头位置的前一个欲访问磁道 r=k; //磁头欲访问磁道 printf("\n请输入当前磁头移动的方向 (0 表示向内 ,1表示向外) : "); scanf("%d",&d); //确定磁头访问的方向 printf("按照CSCAN算法访问顺序为:"); if(d==0||d==1) { if(d==1) //磁头向外侧访问 { for(j=r;j<n;j++)//先访问外侧磁道再转向最里欲访问磁道 { printf("%d ",DiscL[j]); } for(j=0;j<r;j++) { printf("%d ",DiscL[j]); } all=2*DiscL[n-1]-Han-2*DiscL[0]+DiscL[l]; } if(d==0) //磁头向内侧访问 { for(j=r-1;j>=0;j--) { printf("%d ",DiscL[j]); } for(j=n-1;j>=r;j--) { printf("%d ",DiscL[j]); } all=2*DiscL[n-1]-2*DiscL[0]+Han-DiscL[r]; } } else printf("请输入0或1!"); } printf("\n + 移动磁道数:<%5d> \n",all); printf(" + 平均寻道长度:*%0.2f* \n",all/10.0); }


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· 10年+ .NET Coder 心语 ── 封装的思维:从隐藏、稳定开始理解其本质意义
· 地球OL攻略 —— 某应届生求职总结
· 提示词工程——AI应用必不可少的技术
· Open-Sora 2.0 重磅开源!
· 周边上新:园子的第一款马克杯温暖上架