数学基础-3D空间的位置表示
转自:http://www.cnblogs.com/gaoxiang12/p/5113334.html

刚体运动
本篇讨论一个很基础的问题:如何描述机器人的位姿。这也是SLAM研究的一个很基本的问题。这里的位姿表示了位置和姿态。描述位置很简单,如果机器人在平面内运动,那么用两个坐标来描述它的位置:

如果在三维空间中运动,则它的位置就用三个空间坐标来表示:

对于姿态来说,在2D情况下还需要增加一个旋转角θ;在3D情况下表达的方式就有多种,常见的如欧拉角、四元素、旋转矩阵等。那么有了位置和姿态,就可以描述一个坐标系;进一步,还能描述坐标系之间的转换关系。常见的问题如:机器人视野中某个点,对世界坐标系的(或地图的)哪个点?这时,就需要先得到该点针对机器人坐标系坐标值,再根据机器人位姿转换到世界坐标系中。
齐次坐标系
在位姿转换中,通常采用射影空间的齐次坐标表示。齐次坐标是什么呢?记n维射影空间为 其中一个空间点的坐标为普通的3D坐标加一个齐次分量:
其中一个空间点的坐标为普通的3D坐标加一个齐次分量:

例如,在2维和3维射影空间中的点,分别表示为:

用四个数来表示点,说明点和坐标肯定不是一一对应的。没错,在齐次坐标中,某个点x的分量同乘一个非零常数k后,仍然表示的是同一个点。因此,一个点的具体坐标值不是唯一的。如 但是在w不等于0,可以对每一个坐标除以最后一项w,强制最后一项为1,从而得到一个点唯一的坐标表示:
但是在w不等于0,可以对每一个坐标除以最后一项w,强制最后一项为1,从而得到一个点唯一的坐标表示:

那么为什么要使用齐次坐标来表示呢?原因如下:
1)齐次坐标下点和直线(高维空间里为超平面)能够使用同样的表达。


把点和超平面采用同样的表示,这种做法一个非常直接的好处,是射影几何里的“对偶原理”。该原理是说,任何有关“点”与“平面”的命题,都可以交换“点”与“平面”的概念,得到一个对偶的命题。对偶命题和原命题是一样的。通过“对偶原理”,射影几何的数学家就可以偷懒,只需要证一半定理,因为对偶命题和原命题有同样的涵义。例如,我们证明了 中某条件下三点共线,那么替换概念后的三线共点则自然成立。
中某条件下三点共线,那么替换概念后的三线共点则自然成立。
2)齐次坐标能囊括无穷远点与无穷远超平面

θθ3)齐次坐标可以方便地将平移与旋转放在一个矩阵中
有关坐标系怎么用齐次坐标进行变换,后文会详细解释。现在我们能表达点了,还剩下一个姿态。由于2D与3D差别较大,我们分而述之。
2D姿态的描述




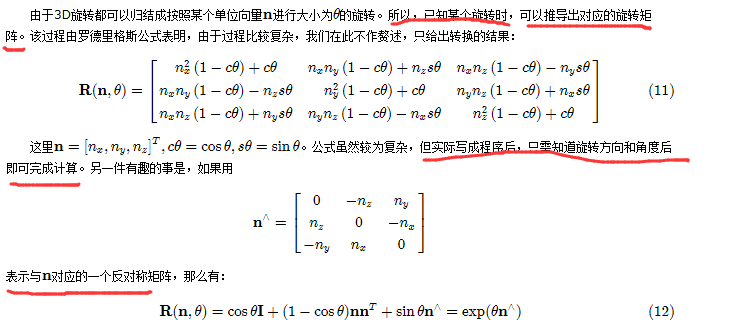
3D变换
3D的旋转可以由旋转矩阵、欧拉角、四元素等若干种方式描述,它 们也统称为三维旋转群SO(3);而3D的变换即旋转加上位移,是SE(3)。为了和2D变换统一起见,我们首先介绍旋转矩阵表示法。
旋转矩阵描述





 浙公网安备 33010602011771号
浙公网安备 33010602011771号