9、教程-5 四轮机器人
本教程旨在从头开始创建您的第一个机器人。机器人将由一个身体、四个轮子和两个距离传感器组成。结果如图所示。下图显示了机器人的俯视图。
tutorial_4_wheels_robot.png
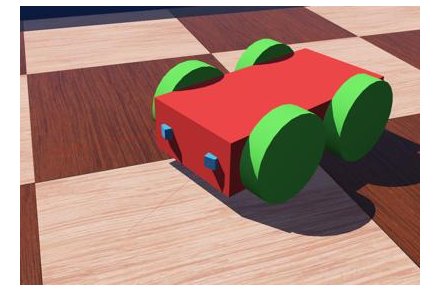
四轮机器人的三维视图。请注意,机器人主体及其轮子的坐标系表示以相同的方式定向。它们的+x矢量(红色)定义机器人的左侧,+y矢量(绿色)定义机器人顶部,+z矢量(蓝色)定义机器人前部。距离传感器以不同的方式定向,它们的+x矢量指示传感器的方向。
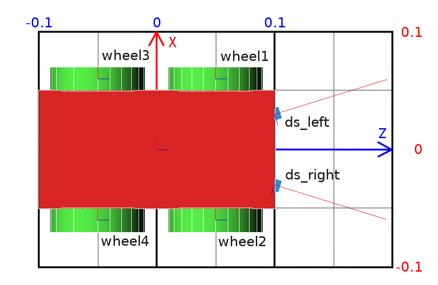
四轮机器人的俯视图。机器人后面的网格尺寸为0.2 x 0.3米。文本标签与设备名称相对应。
在实体节点中分离机器人
一些定义和规则来创建机器人模型:
-
包含实体节点及其所有派生节点的集合称为实体节点。
-
类似的定义适用于“设备Device”、“机器人Robot”、“关节Joint”和“电机Motor”节点。您可以在节点图表中获得有关节点层次结构的详细信息。
-
大多数传感器和执行器同时是实体节点和设备Device节点。
-
机器人模型的主要结构是连接在一起的实体节点树。该树的根节点应该是Robot节点。
-
实体通过关节Joint节点链接在一起。设备Device节点应该是机器人节点、实体节点或关节节点的直接子节点。
-
关节Joint节点用于在其父节点和子节点之间添加一个(或两个)自由度(DOF)。关节节点的直接父节点和子节点都是实体节点。
-
从“关节Joint”派生的节点允许在链接的实体节点之间创建不同类型的约束。机器人技术中最常用的是铰链HingeJoint关节,它可以为包括轮子在内的旋转电机建模。
-
可以通过将“位置传感器”节点或电机节点分别添加到其设备域来监控或启动“关节Joint”节点。
考虑到这些规则,我们可以开始设计用于为机器人建模的节点层次结构。第一步是确定机器人的哪个部分应该建模为实体节点。
在我们的示例中,这种操作非常明显。该机器人具有4个自由度,与车轮电机相对应。它可以分为五个实体节点:车身和四个车轮。
根据机器人模型的预期应用,在建模时降低自由度可能是获得有效仿真所必需的。例如,在对脚轮进行建模时,实际的方法意味着对2自由度进行建模。但是,如果这种精度对模拟毫无用处,就可以找到一种更有效的方法。例如,将脚轮建模为与地面摩擦系数为零的球体。
第二步是确定哪个实体节点是Robot节点(根节点)。这种选择是任意的,但解决方案通常更容易实现。例如,在人形机器人的情况下,机器人节点通常是机器人胸部,因为机器人对称性有助于关节参数的计算。
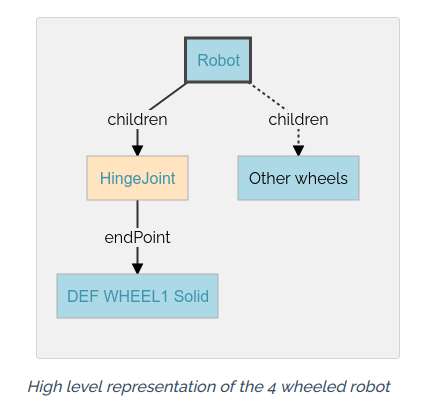
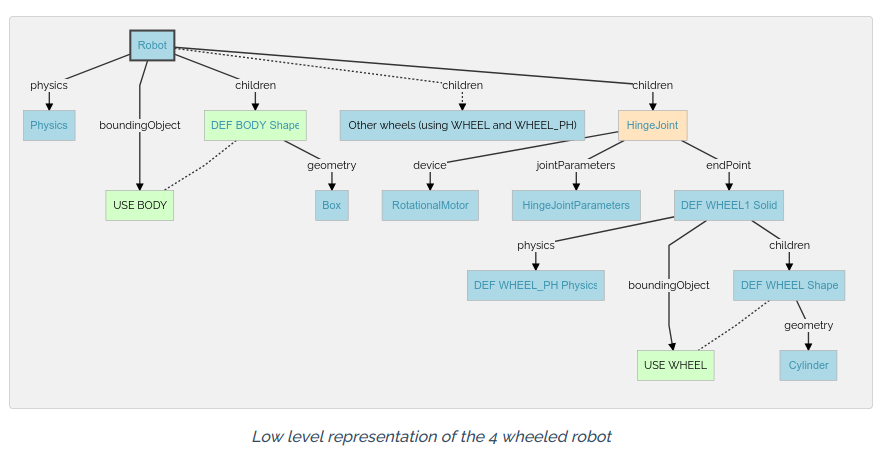
在我们的案例中,身体箱显然是更好的选择。该图描绘了机器人的实体节点层次结构。
在场景树的末尾,添加一个Robot节点,该节点具有四个HingeJoint节点,其中一个Solid节点作为端点。请参考此图。将包含长方体几何体的Shape节点添加到Robot节点。将形状的颜色设置为红色。使用形状定义Robot节点的boundingObject字段。框的尺寸为(0.2、0.1、0.05)。向Robot添加一个Physics节点。该图表示定义机器人的所有节点。到目前为止,只实现了根Robot节点的直接子节点。
HingeJoint
轮子的初始位置由“实体”节点的平移域和旋转域定义。
旋转原点(锚点)和旋转轴(轴)由HingeJoint节点的可选HingeJointParameters子项定义。
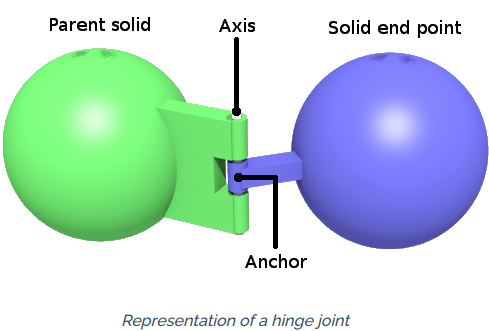
车轮的半径为0.04,其厚度(气缸的高度)为0.02。对于第一个车轮,应将实心平移定义为(0.05,0.06,0),以定义车身和车轮之间的相对间隙,并将旋转定义为(10 0 1.5708),以使轮缸正确定向。HingeJointParameters锚点也应定义为(0.05、0.06、0),以定义旋转原点(相对于主体)。最后,HingeJointParameters轴应定义旋转轴。在我们的例子中,它是沿着y轴的(所以(0,1,0))。
添加“HingeJointParameters”节点,然后如上所述输入字段值。一些标志显然必须针对其他车轮进行更新。
现在,让我们实现车轮的圆柱体形状。
对于每个铰链关节,有三个字段需要在其中添加节点。
- jointParameters: 添加HingeJointParameters并配置锚点(0.05-0.06 0)和轴(0 1 0)字段。这些值必须根据车轮的位置进行修改。
- device: 添加一个旋转马达,以便能够驱动车轮。根据此图将其名称字段从wheel1更改为wheel4。这些标签将用于引用控制器中的车轮。
- endPoint:在“实体”的子字段中添加“实体”节点,然后添加“形状”节点,最后在“形状”的几何体字段中添加一个圆柱体。圆柱体的半径应为0.04,高度应为0.02。将轮子的颜色设置为绿色。
完成缺失的节点以获得与图中所示相同的结构。不要忘记物理节点。
Sensors
教程4的电子贴纸上使用的传感器与本节中使用的传感器不同。注意它们的测量间隔在0 cm=0和10 cm=1000之间。在此处查找有关lookupTable字段的更多信息。
机器人建模的最后一部分是在机器人上添加两个距离传感器。这可以通过添加两个DistanceSensor节点作为Robot节点的直接子节点来完成。注意,距离传感器沿着正x轴获取其数据。因此,有必要旋转距离传感器,使其x轴指向机器人外部(见图)。
如上所述,添加两个距离传感器。距离传感器与机器人的前矢量成0.3弧度的角度。将图形和物理形状设置为边为0.01[m]的立方体(未变换)。将颜色设置为蓝色。根据此图的标签设置名称字段。
Controller
在前面的教程中,您已经学习了如何设置反馈回路以及如何读取距离传感器值。但是,执行“旋转电机”节点是一项新功能。要对旋转电机进行编程,第一步是包括与RotationalMotor节点相对应的API模块:
#include <webots/motor.h>
然后,要获取RotationalMotor节点的引用,请执行以下操作:
// initialize motors WbDeviceTag wheels[4]; char wheels_names[4][8] = { "wheel1", "wheel2", "wheel3", "wheel4" }; int i; for (i = 0; i < 4 ; i++) wheels[i] = wb_robot_get_device(wheels_names[i]);
电机可以通过设置其位置、速度、加速度或力来启动。这里我们感兴趣的是设置它的速度。这可以通过将其位置设置为无穷大并限制其速度来实现:
double speed = -1.5; // [rad/s] wb_motor_set_position(wheels[0], INFINITY); wb_motor_set_velocity(wheels[0], speed);
实现一个名为four_wheeled_collision_avoidance的控制器,通过距离传感器检测障碍物来移动机器人并避开障碍物。
请注意,DistanceSensor节点的lookupTable字段指示传感器返回的值。为了帮助调试传感器,可以在机器人窗口中实时查看传感器的值。要打开机器人窗口,双击机器人主体,它将在左侧显示一个菜单,其中包含DistanceSensor和RotationalMotor图形。运行模拟以查看演变。
不要忘记设置Robot节点的控制器字段以指示您的新控制器。
与往常一样,本练习的可能解决方案位于教程目录中。
控制器完整代码
#include <webots/distance_sensor.h> #include <webots/motor.h> #include <webots/robot.h> #define TIME_STEP 64 int main(int argc, char **argv) { wb_robot_init(); int i; bool avoid_obstacle_counter = 0; WbDeviceTag ds[2]; char ds_names[2][10] = {"ds_left", "ds_right"}; for (i = 0; i < 2; i++) { ds[i] = wb_robot_get_device(ds_names[i]); wb_distance_sensor_enable(ds[i], TIME_STEP); } WbDeviceTag wheels[4]; char wheels_names[4][8] = {"wheel1", "wheel2", "wheel3", "wheel4"}; for (i = 0; i < 4; i++) { wheels[i] = wb_robot_get_device(wheels_names[i]); wb_motor_set_position(wheels[i], INFINITY); } while (wb_robot_step(TIME_STEP) != -1) { double left_speed = 1.0; double right_speed = 1.0; if (avoid_obstacle_counter > 0) { avoid_obstacle_counter--; left_speed = 1.0; right_speed = -1.0; } else { // read sensors double ds_values[2]; for (i = 0; i < 2; i++) ds_values[i] = wb_distance_sensor_get_value(ds[i]); if (ds_values[0] < 950.0 || ds_values[1] < 950.0) avoid_obstacle_counter = 100; } wb_motor_set_velocity(wheels[0], left_speed); wb_motor_set_velocity(wheels[1], right_speed); wb_motor_set_velocity(wheels[2], left_speed); wb_motor_set_velocity(wheels[3], right_speed); } wb_robot_cleanup(); return 0; // EXIT_SUCCESS }


 浙公网安备 33010602011771号
浙公网安备 33010602011771号