5、Error-state kinematics for IMU-driven systems
IMU驱动系统的误差状态运动学

5.3.1 真值状态运动学
真运动学方程如下:
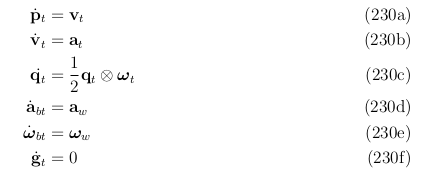
这里,真实的加速度a_t和角速率ω_t是从一个IMU中以身体坐标系中的噪声传感器读数a_m和ω_m的形式获得的。

变换一下方程,将真值提取出来,

把上面的内容代入,得到的运动学系统是:

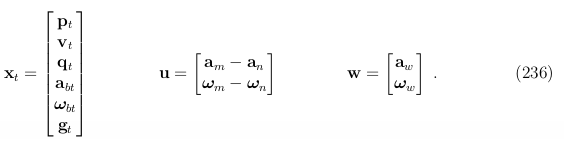
 ,系统状态为xt,u为IMU带有噪声的读数,以及一个高斯噪声w,定义如下
,系统状态为xt,u为IMU带有噪声的读数,以及一个高斯噪声w,定义如下
上述公式中需要注意的是,重力向量g_t将由滤波器进行估计。它具有恒定的演化方程式(235f),因为其大小被认为是恒定的。系统从一个固定且任意已知的初始方向q_t(t=0)=q_0开始,由于通常不在水平平面上,因此初始重力向量通常是未知的。为了简化起见,通常取q_0=(1,0,0,0),因此R_0=R{q_0}=I。
我们估计在q0坐标系下表达的gt,而不是在水平坐标系下表达的qt,这样可以将初始方向的不确定性转移到重力方向的初始不确定性上。我们这样做是为了提高线性度:事实上,方程(235b)现在是关于g线性的,而g承载了所有的不确定性,初始方向q0是已知的,没有不确定性,因此q从一开始就没有不确定性。一旦估计出重力向量,水平平面就可以恢复,如果需要,整个状态和恢复的运动轨迹可以重新定向以反映估计的水平面。有关进一步的理由,请参见(Lupton和Sukkarieh,2009)。当然,这是可选的,读者可以从系统中删除所有与重力有关的方程,并采用更传统的方法,即将g,(0,0,-9.8xx)视为实验现场重力向量的适当小数位数,并采用不确定的初始方向q0。
5.3.2 名义状态运动学
名义状态运动学对应于没有噪声或扰动的模型系统,

5.3.3 误差状态运动学
目标是确定误差状态的线性化动态。对于每个状态方程,我们编写其组合(在表3中),解决误差状态并简化所有二阶无穷小量。我们在此给出完整的误差状态动态系统,然后进行评论和证明。
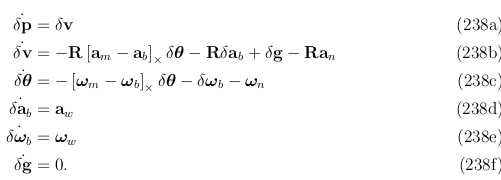
方程(238a)、(238d)、(238e)和(238f)分别表示位置、两个偏差和重力误差,它们是从线性方程推导出来的,它们的误差状态动态是微不足道的。
作为一个例子,考虑表3中的真实位置方程(235a)和名义位置方程(237a),它们的组合公式pt = p + δp,解出δp得到(238a)。
方程(238b)和(238c)给出了速度和方向误差的表达式,需要对非线性方程(235b)和(235c)进行一些非平凡的变换才能得到线性化动力学方程。它们的证明在接下来的两个部分中进行。
方程(238b):线性速度误差。我们希望决定δv.的导数,速度误差的运动学,从以下关系开始

在公式(240)中,我们将(237b)进行了重写,引入了aB和δaB,它们分别定义为机体坐标系下的大信号加速度和小信号加速度。其中,(239)是Rt的小信号近似值。

为了将惯性参考系中的真实加速度写成大信号和小信号项的组合。

我们可以通过写出v̇t的表达式(235b)的两种不同形式(左侧和右侧展开式)来进行推导,忽略了O(||δθ||2)项。
消除二阶项以及重新组织叉乘

最后得到,
为了进一步简化这个表达式,我们通常可以假设加速度计的噪声是白噪声、不相关和各向同性的24。

下面证明噪声乘以旋转矩阵还是等于噪声

最后得到,

Equation (238c):方向误差。希望去决定δθ的导数,角度误差的运动学。从以下关系开始

四元素导数的真值和名义定义的导数。
与加速度一样,为了清晰起见,我们将角速率中的大信号和小信号项分组。

wt可以写为一个名义部分和误差部分,

我们通过两种不同的方法(左侧和右侧展开)计算 q̇t。
移项简化q并分离δq的导数,我们得到:

(257a)式子是一个二阶无穷小量,不是很重要,第二个方程,在忽略二阶小量之后,得到,
5.4 离散时间下的系统运动学
上述微分方程需要被积分成差分方程,以考虑离散时间间隔∆t>0。积分方法可能会有所不同。在某些情况下,可以使用精确的闭式解。在其他情况下,可以采用不同精度的数值积分方法。请参考附录中有关积分方法的相关细节。
需要对以下子系统进行积分:
1、名义状态。
2、误差状态。
a)确定性部分:状态动力学和控制。
b)随机部分:噪声和扰动
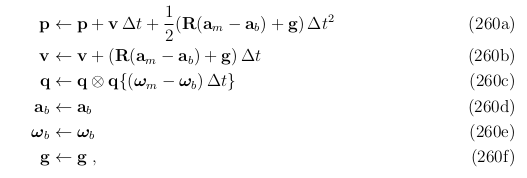
5.4.1 名义状态运动学
我们可以将名义状态的差分方程写成以下形式:
5.4.2 误差状态运动学
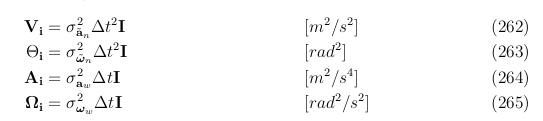
确定性部分通常是正常积分的(在这种情况下,我们遵循附录C.2中的方法),而随机部分的积分会导致随机脉冲(请参见附录E)。

这里,v i,θ i,a i和ω i是应用于速度、方向和偏差估计的随机脉冲,由白色高斯过程建模。它们的平均值为零,它们的协方差矩阵是通过将 a n,ω n,a w和ω w的协方差积分到步长时间∆t中获得的(见附录E)。

5.4.3 误差状态的雅可比矩阵和扰动矩阵
雅可比矩阵可以通过对前一节中的误差状态差分方程进行简单的观察得到。
为了以紧凑的形式写出这些方程,我们考虑名义状态向量x、误差状态向量δx、输入向量um和扰动脉冲向量i,具体如下(有关详细信息和理论基础,请参见附录E.1)。

现在误差状态系统如下

ESKF预测方程如下:


上面的雅可比矩阵和协方差矩阵的表达式如下所述。这里出现的所有与状态相关的值都直接从名义状态中提取。
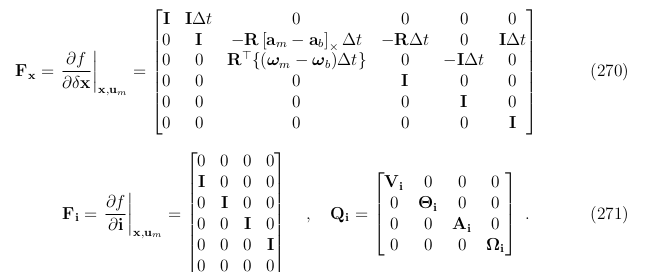
请特别注意,F x是系统的转移矩阵,可以通过多种方式以不同的精度进行近似。我们在这里展示了其中最简单的形式(欧拉形式)。请参见附录B至D以获取更多参考资料。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号