0-VINS在自己的相机上运行
1.环境
ubuntu18.04;ros1;opencv 的OAK-D-W
2.相机驱动以及标定参考
https://www.cnblogs.com/gary-guo/p/16567389.html
3.编译vins-fusion
下载https://github.com/HKUST-Aerial-Robotics/VINS-Fusion
直接编译即可;
配置yaml文件
oak-d-w.yaml
%YAML:1.0 #common parameters #support: 1 imu 1 cam; 1 imu 2 cam: 2 cam; imu: 1 num_of_cam: 2 imu_topic: "/stereo_inertial_publisher/imu" image0_topic: "/stereo_inertial_publisher/left/image_rect" image1_topic: "/stereo_inertial_publisher/right/image_rect" output_path: "/home/gary/VINS/vins_fusion_ws/output/data" cam0_calib: "oak-left.yaml" cam1_calib: "oak-right.yaml" image_width: 1280 image_height: 720 # Extrinsic parameter between IMU and Camera. estimate_extrinsic: 1 # 0 Have an accurate extrinsic parameters. We will trust the following imu^R_cam, imu^T_cam, don't change it. # 1 Have an initial guess about extrinsic parameters. We will optimize around your initial guess. body_T_cam0: !!opencv-matrix rows: 4 cols: 4 dt: d data: [ -0.00635382, 0.99990027, 0.01261288, -0.00024044, 0.99983888, 0.00656418, -0.01670701, 0.0001788, -0.01678814, 0.01250469, -0.99978087, 0.00007448, 0., 0., 0., 1. ] body_T_cam1: !!opencv-matrix rows: 4 cols: 4 dt: d data: [ -0.00871704, 0.99988493, 0.01241492, -0.07392172, 0.99983161, 0.00891572, -0.01603926, -0.00081612, -0.0161481, 0.01227302, -0.99979428, -0.00052702, 0., 0., 0., 1. ] #Multiple thread support multiple_thread: 1 #feature traker paprameters max_cnt: 150 # max feature number in feature tracking min_dist: 10 # min distance between two features 30 freq: 10 # frequence (Hz) of publish tracking result. At least 10Hz for good estimation. If set 0, the frequence will be same as raw image F_threshold: 1.0 # ransac threshold (pixel) show_track: 0 # publish tracking image as topic flow_back: 1 # perform forward and backward optical flow to improve feature tracking accuracy #optimization parameters max_solver_time: 0.04 # max solver itration time (ms), to guarantee real time max_num_iterations: 8 # max solver itrations, to guarantee real time keyframe_parallax: 10.0 # keyframe selection threshold (pixel) #imu parameters The more accurate parameters you provide, the better performance acc_n: 0.1 # accelerometer measurement noise standard deviation. #0.2 0.04 gyr_n: 0.01 # gyroscope measurement noise standard deviation. #0.05 0.004 acc_w: 0.001 # accelerometer bias random work noise standard deviation. #0.002 gyr_w: 0.0001 # gyroscope bias random work noise standard deviation. #4.0e-5 g_norm: 9.805 # gravity magnitude #unsynchronization parameters estimate_td: 1 # online estimate time offset between camera and imu td: 0.00 # initial value of time offset. unit: s. readed image clock + td = real image clock (IMU clock) #loop closure parameters load_previous_pose_graph: 0 # load and reuse previous pose graph; load from 'pose_graph_save_path' pose_graph_save_path: "/home/gary/VINS/vins_fusion_ws/output/pose_graph/" # save and load path save_image: 1 # save image in pose graph for visualization prupose; you can close this function by setting 0
oak-left.yaml
%YAML:1.0 --- model_type: PINHOLE camera_name: camera image_width: 1280 image_height: 720 distortion_parameters: k1: 0.0034134236898324694 k2: -0.005784037819853257 p1: 0.006612629714095522 p2: -6.620438974374915e-05 projection_parameters: fx: 549.8435891287721 fy: 548.7383777426921 cx: 614.0003853040437 cy: 333.32127862399466
oak-right.yaml
%YAML:1.0 --- model_type: PINHOLE camera_name: camera image_width: 1280 image_height: 720 distortion_parameters: k1: 0.0019263641724087306 k2: -0.007969836175443666 p1: 0.007617163141992544 p2: -3.010542501917051e-05 projection_parameters: fx: 548.1775690210155 fy: 547.319988333231 cx: 616.4979955625082 cy: 335.0018773143142
具体数据参考标定内容
说明一下,在这里imu标定的内容放进去好像效果没那么好了,不知道为什么
4.运行
相机驱动:位于:/home/gary/oak_d_wide_ws
roslaunch depthai_examples stereo_inertial_node.launch
运行vins-fusion:
位于:/home/gary/VINS/vins_fusion_ws
可视化:roslaunch vins vins_rviz.launch
运行vio:rosrun vins vins_node /home/gary/VINS/vins_fusion_ws/src/VINS-Fusion/config/realsense_d435i/oak-d-w.yaml
运行回环:rosrun loop_fusion loop_fusion_node /home/gary/VINS/vins_fusion_ws/src/VINS-Fusion/config/realsense_d435i/oak-d-w.yaml
完成!
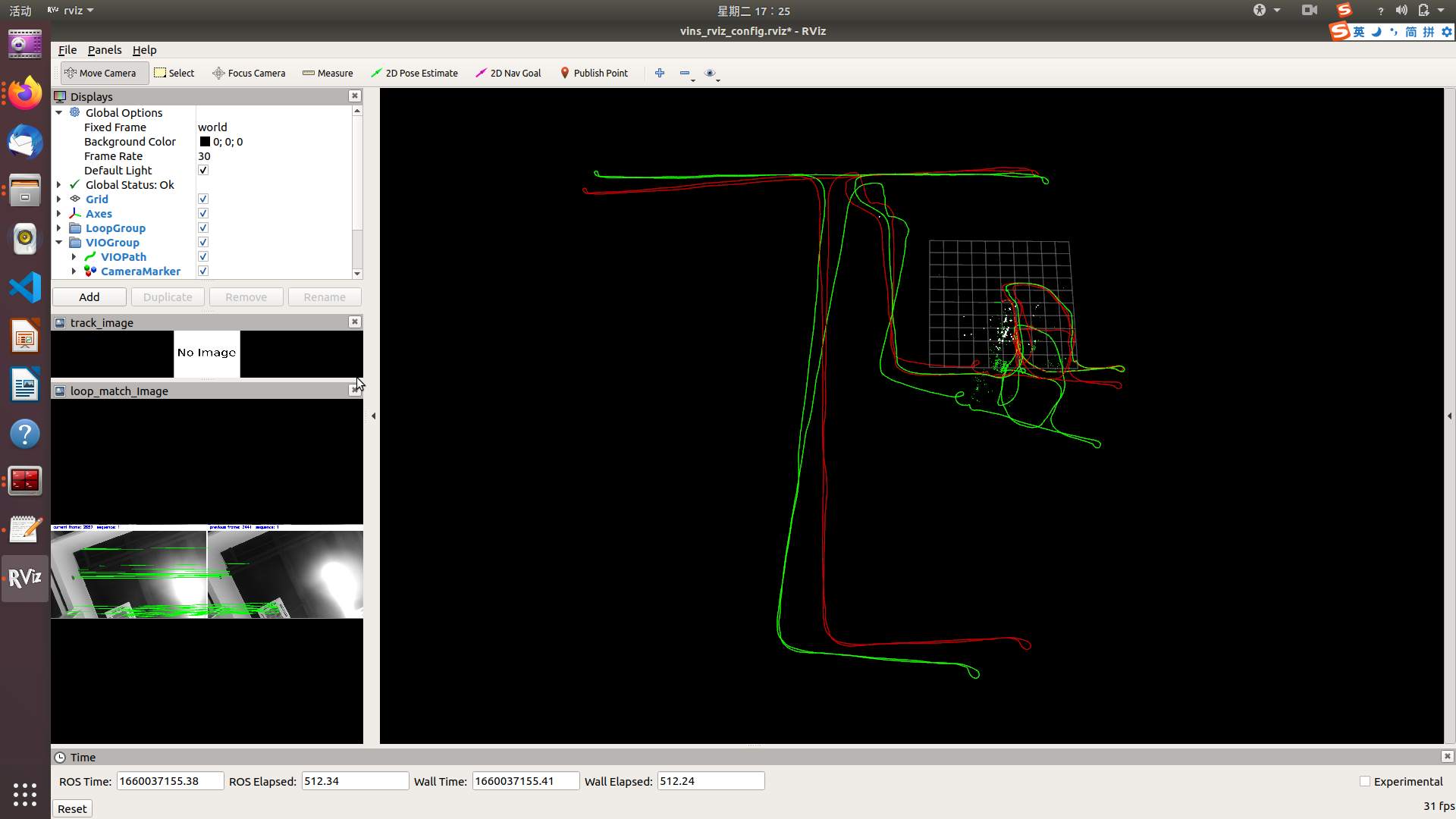
5.运行结果展示


 浙公网安备 33010602011771号
浙公网安备 33010602011771号