SL-IMU-5、6-惯性导航解算方法以及惯性导航误差分析
1、概述
惯性导航解算包括:姿态解算、速度解算、位置解算,其中姿态解算最为核心。
姿态解算:
姿态有三种表示形式
1) 欧拉角
2) 旋转矩阵 若对详细过程感兴趣,可参考《捷联惯导算法与组
3) 四元数 合导航原理》书籍(严恭敏等编著)
姿态解算方法的推导,是整个惯性技术中最为复杂的,但是却最为“无用”的。
因此后面的推导,为了简洁性,会忽略一些细节,为了理解的流畅,会忽略一些严谨性。
若对详细过程感兴趣,可参考《捷联惯导算法与组合导航原理》书籍(严恭敏等编著)
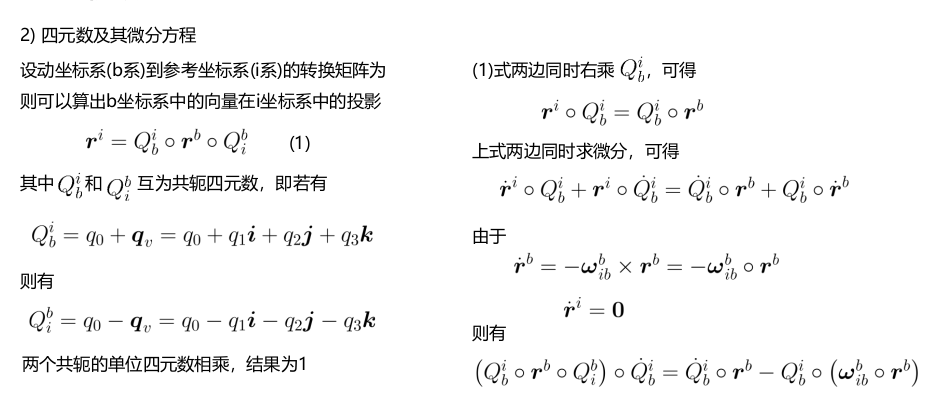
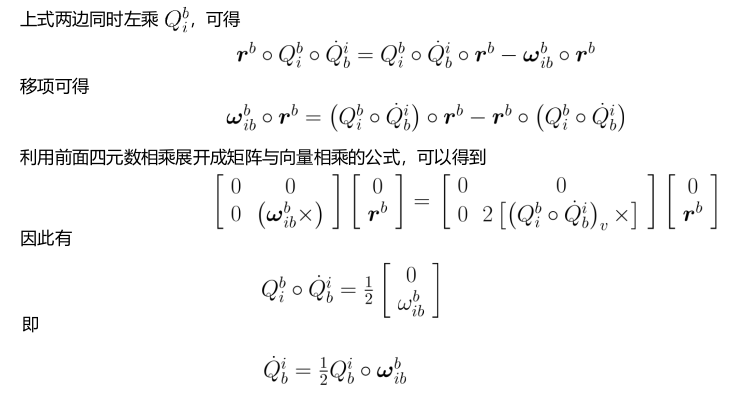
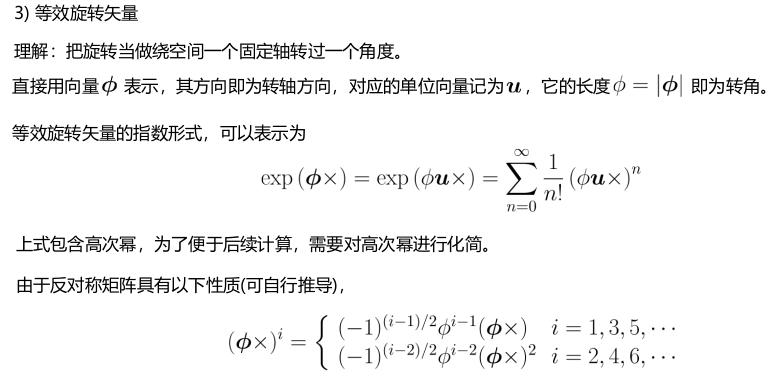
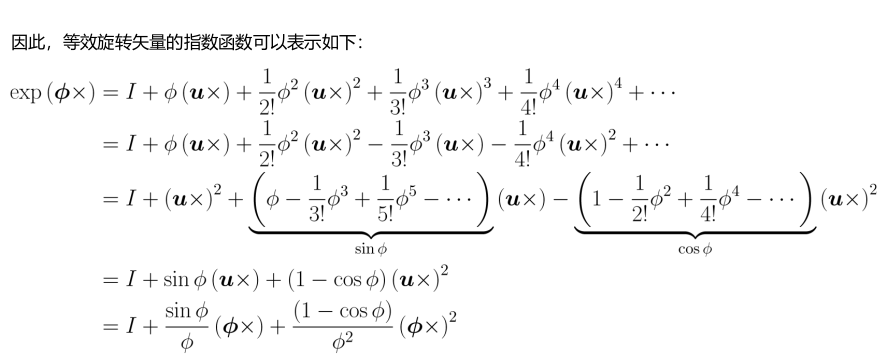
2、基础知识




3.姿态更新


 浙公网安备 33010602011771号
浙公网安备 33010602011771号