卫星导航系统-第14讲-差分定位方法-1
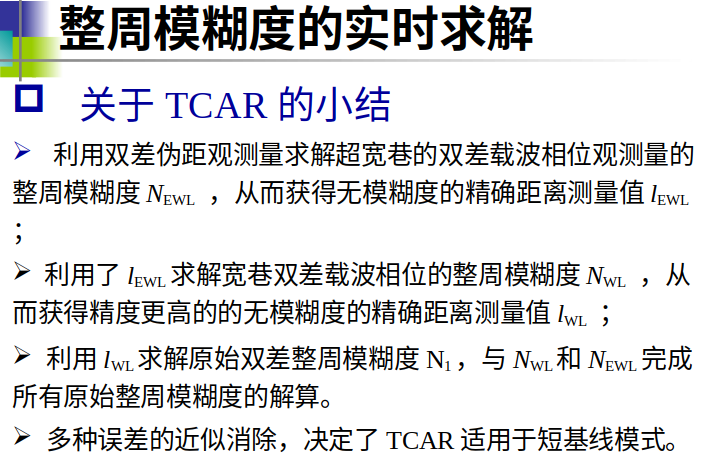
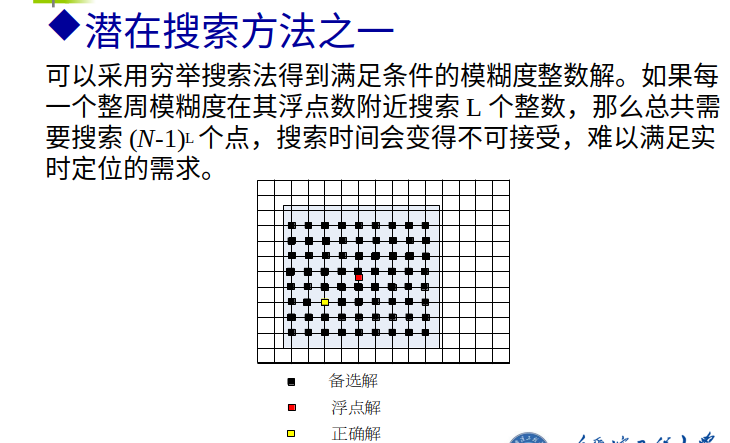
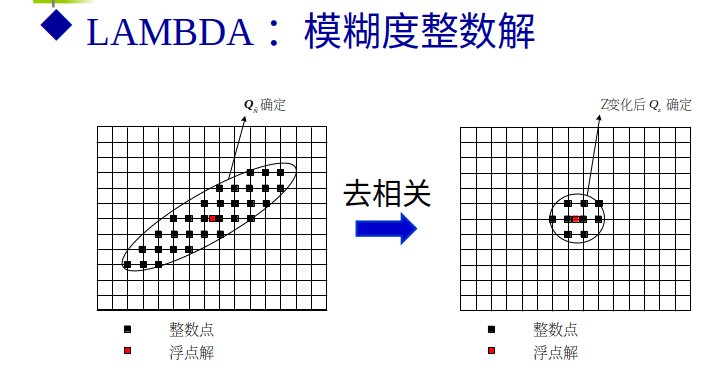
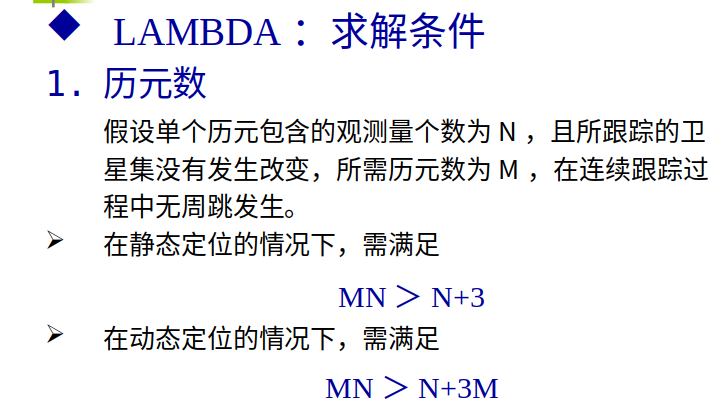
整周模糊度的实时求解
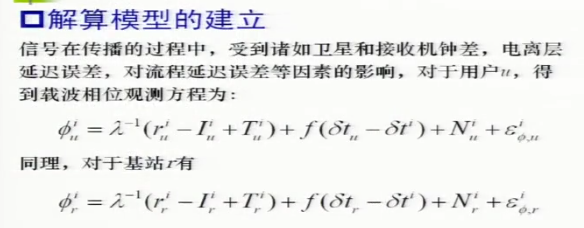
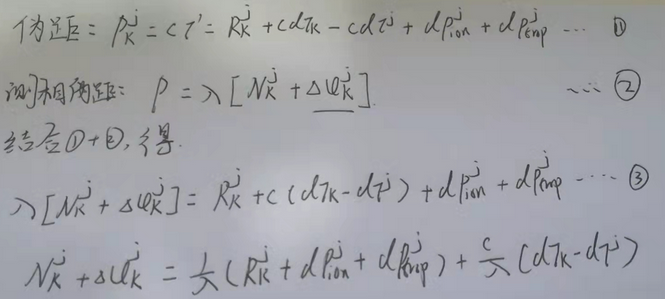
上面写的是码伪距观测量与载波相位的关系,在码伪距中电离层是加号,因为在码伪距中电离层有滞后的效应,所以就是加;对于载波相位的话,具有超前的效应,所以是减;
上面公式中的整周模糊度应该是减吧??
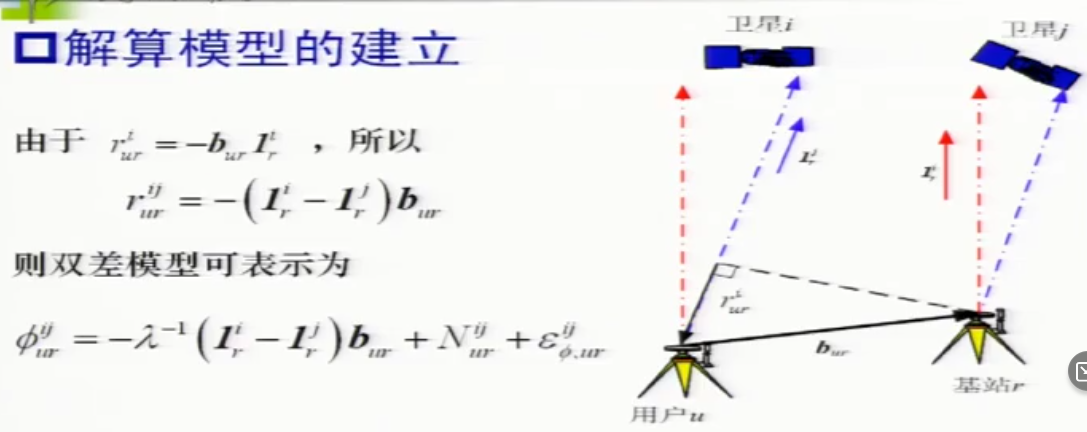
上面可以求解出bur,移动站相对基站的位置,如果要知道绝对位置,还需要知道基站r的位置;
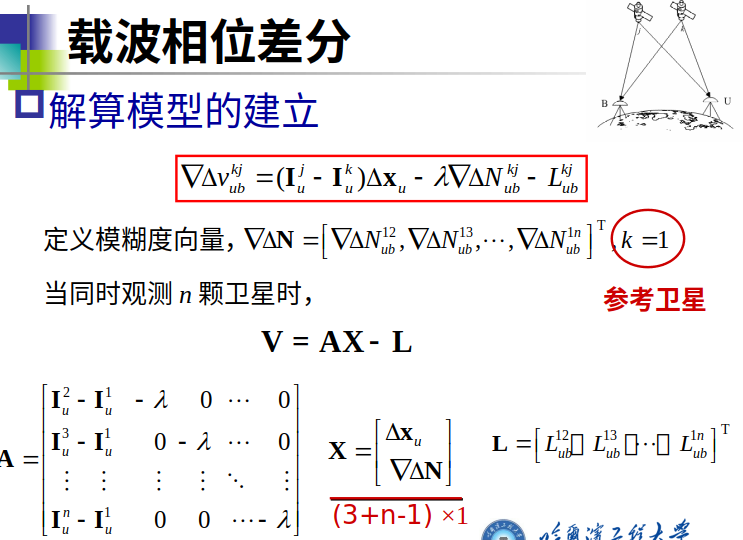


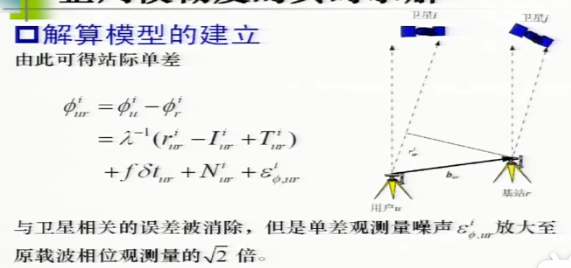
解算模型的进一步考虑
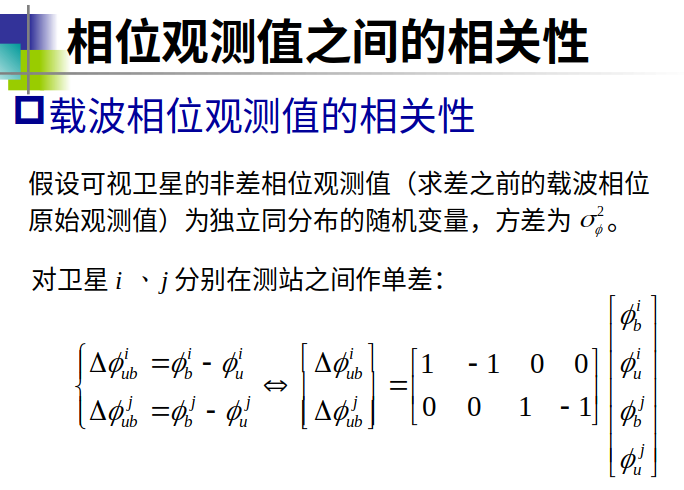
在短基线的前提下,由于用户与之间空间信号误差的强相关性,经过双差之后强相关误差将充分被消除。因此一般我们总是基于相位差是相互独立的等精度观测值这样的假设来开展工作。
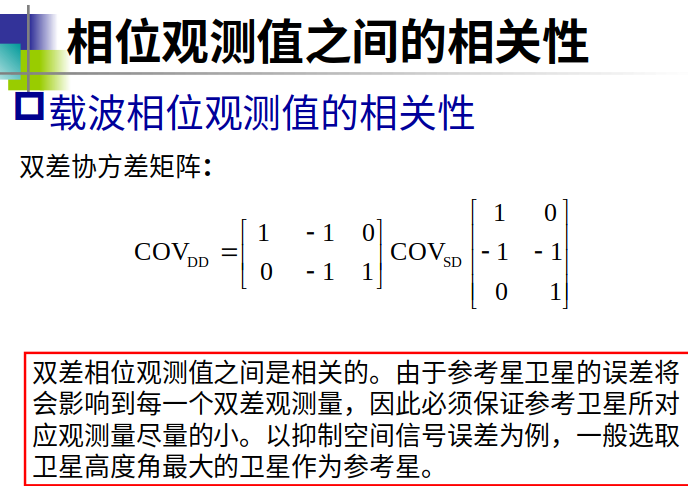
在中长基线前提下,用户与基站之间的空间信号误差呈现出去相关的特点,因此差分之后仍将以残差形式存在,因此必须考虑相关残差对解算模型鲁棒性的影响。
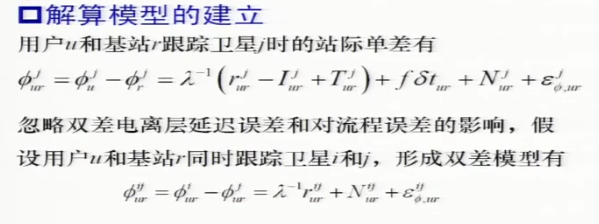
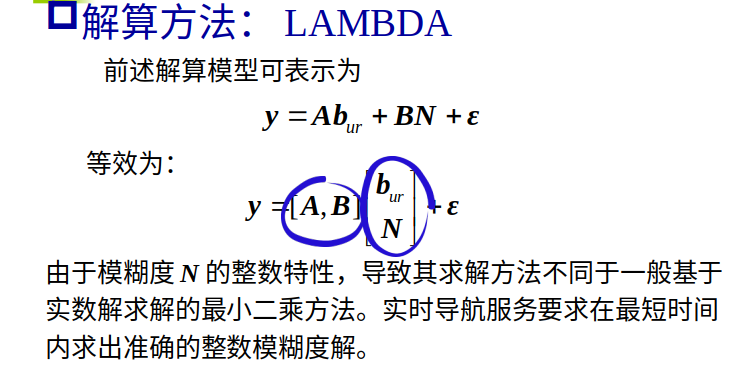
位置解算
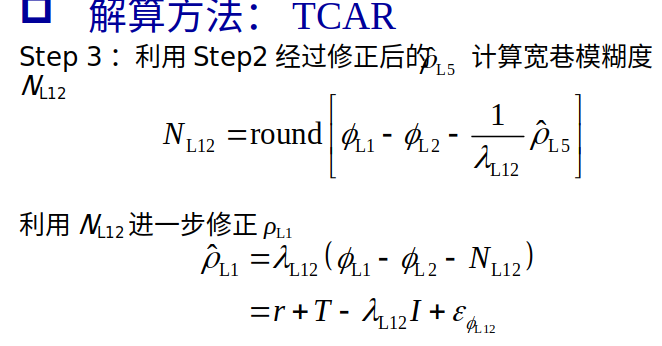
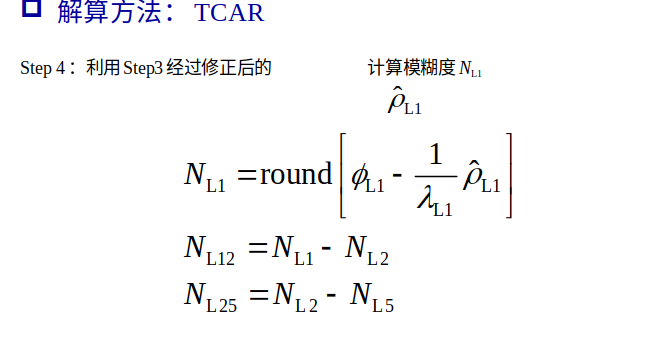
在观测量域里面进行解算整周模糊度:即利用多个频点上的伪距观测量和载波相位观测量来估算整周模糊度。


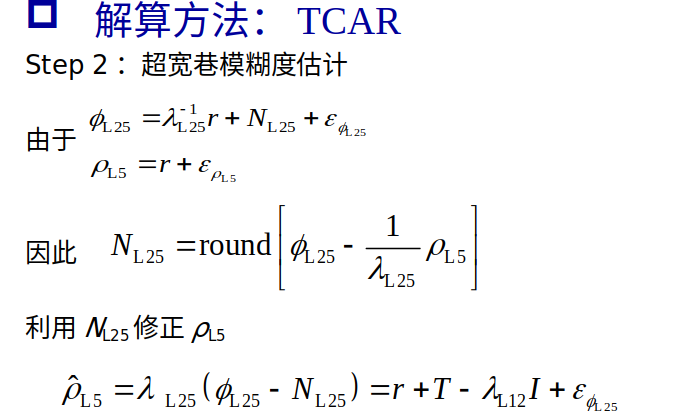
上式中的λL12改成λL25;
上面是假设基站和用户比较近,忽略了电离层和对流层误差的情况
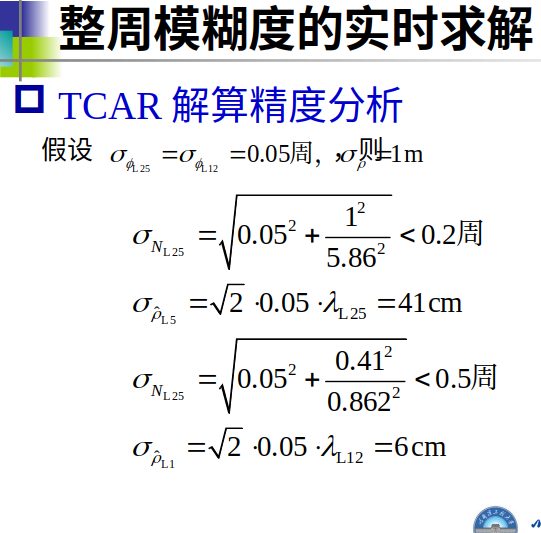
在等式NL25后面的λL25应该越大越好;



 浙公网安备 33010602011771号
浙公网安备 33010602011771号