卫星导航系统-第13讲-差分定位方法-1
载波相位差分定位技术(高精度领域应用比较广的技术)
卫星导航信号里面有载波(载波相位的波长是20cm左右,用载波相位进行差分定位,定位精度是很高的)和测距码(精度不高)。
基本原理
与伪距差分原理类似,由基准站通过数据链实时将其载波观测量及基站坐标信息一同传送给用户站。用户站观测卫星信号的载波相位,同时接收来自基准站的载波相位有关信息,对相位观测值进行修正或组成相位差分观测方程进行处理,能给出厘米级的定位结果。
载波相位容易发生周跳,和环境的关系也是比较大的,环境不太好,定位结果可能不太稳定,所有有时候会采用后处理差分的方法;
修正法:

用户:载波相位的伪距=波长*(载波相位的观测值 + 整周模糊度)+用户的钟差 +电离层延迟 + 对流层延迟
公式跟用户差不多
基准站:载波相位的伪距=波长*(载波相位的观测值 + 整周模糊度)+用户的钟差 +电离层延迟 + 对流层延迟
基准站和卫星之间的真实距离是可以测到的,因为基准站的坐标是完全可以确定的,从星历上可以知道卫星的位置,那么就知道了基准站到卫星的真实距离,然后由于基准站可以观测到达卫星之间的伪距,当两者相距不远的时候,二者的电离层和对流层的误差不大,通过将基准站的真实距离减去观测距离,将这个得到的误差,传送给用户进行纠正。
求差法
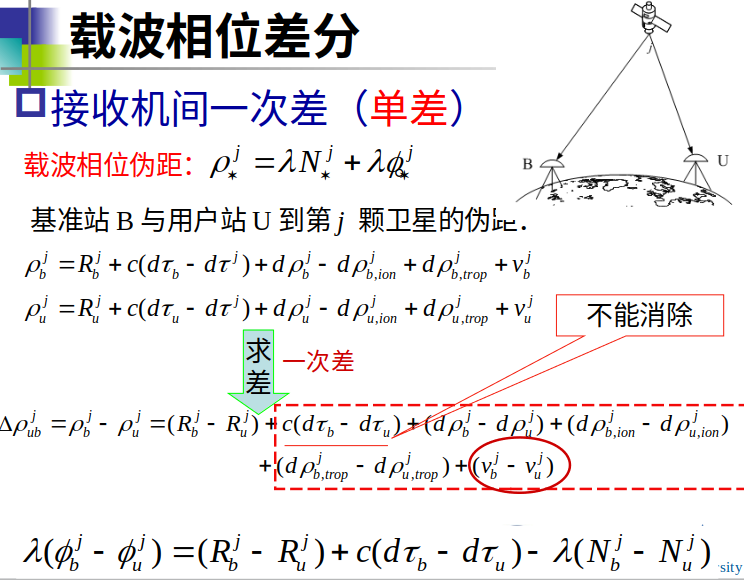
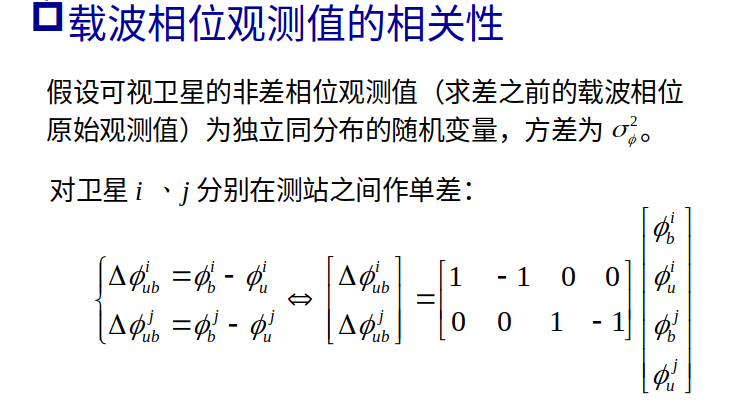
接收机间的一次差
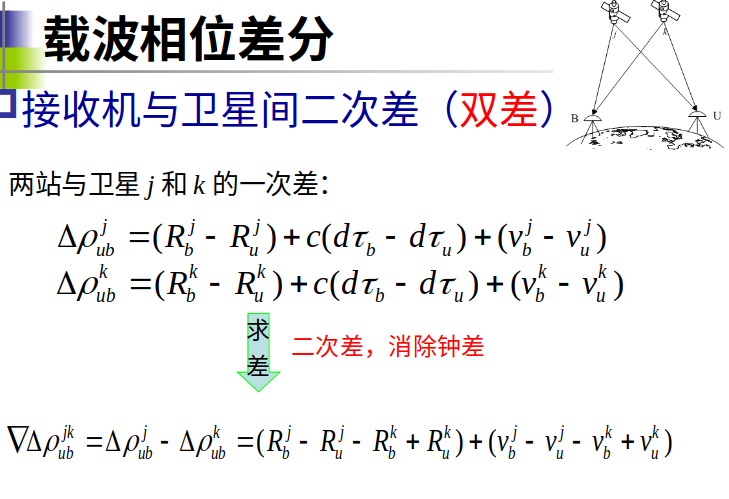
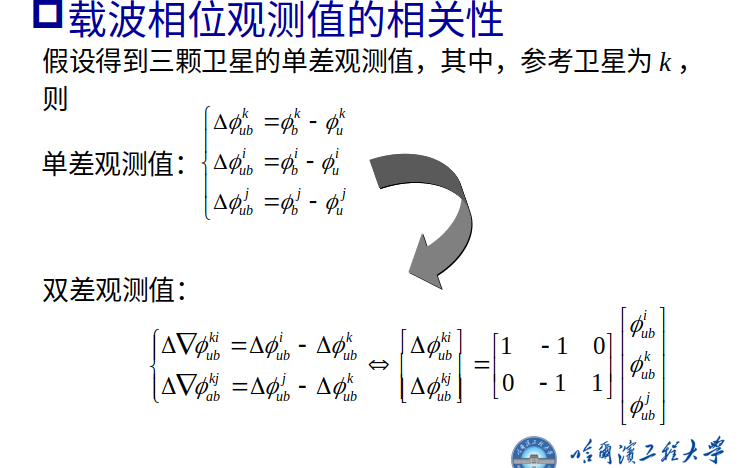
接收机和卫星间的二次差
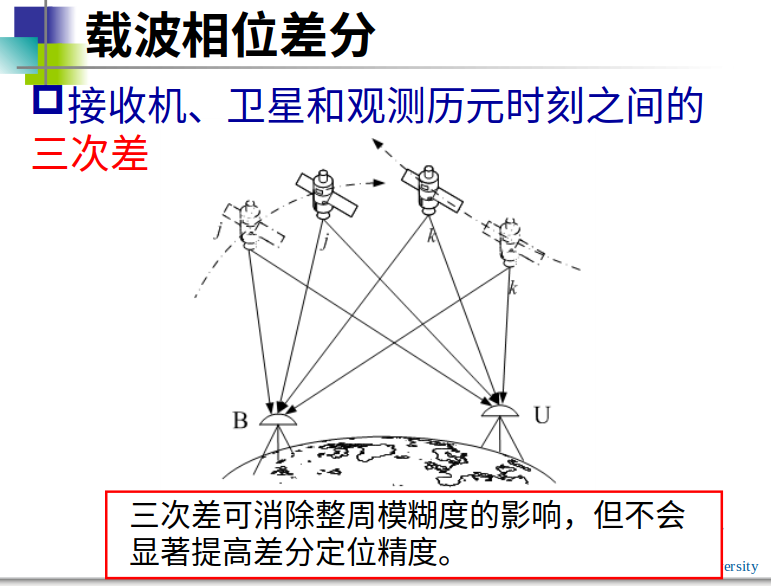
接收机、卫星和观测历元时刻之间的三次差
dpbj表示载波相位伪距的残差????
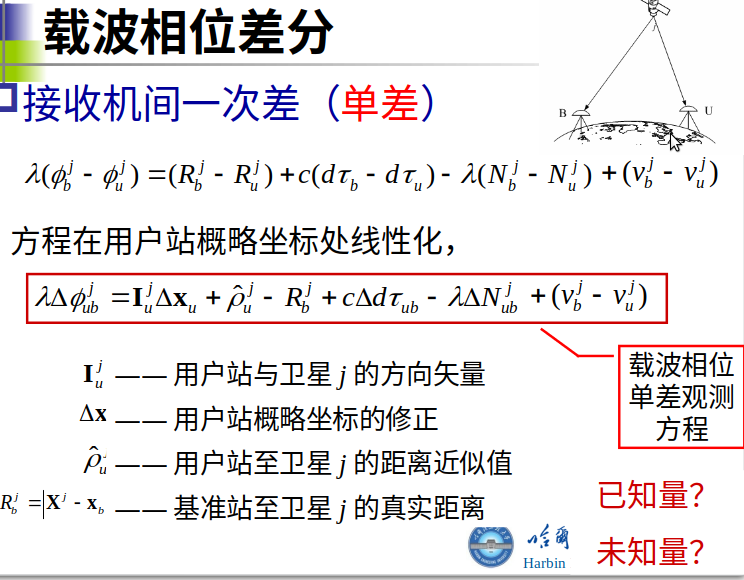
在整周模糊度已知的情况下,上面公式中,δxu有三个未知数,加上dtaoub也是一个未知数,那么在单差的情况下,可以通过观测四颗卫星来确定位置信息;
在做一次差的时候,有一些误差没有被消除,希望在做两次差的时候能够进行进一步消除;得到精度更高一点;
对两颗卫星的单差方程进行求差;接收机钟差被抵消了;
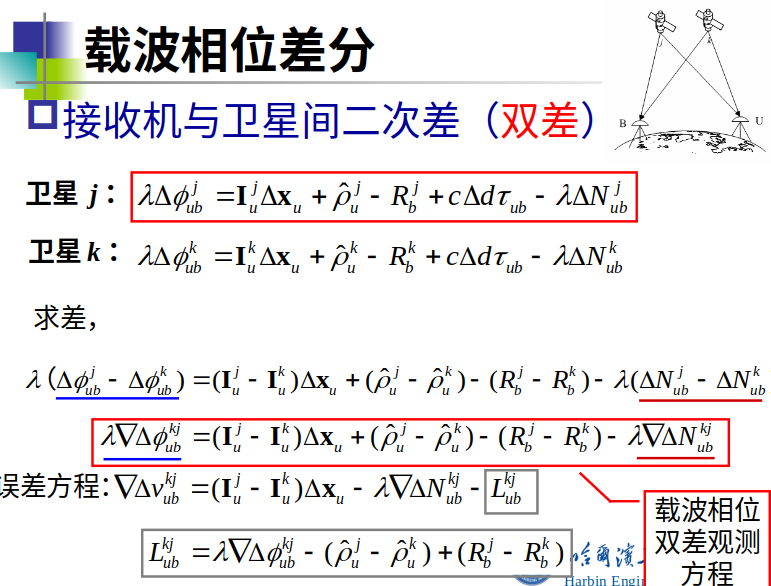
Lkjub表示已知量;误差方程中等号左边的是一个观测噪声;
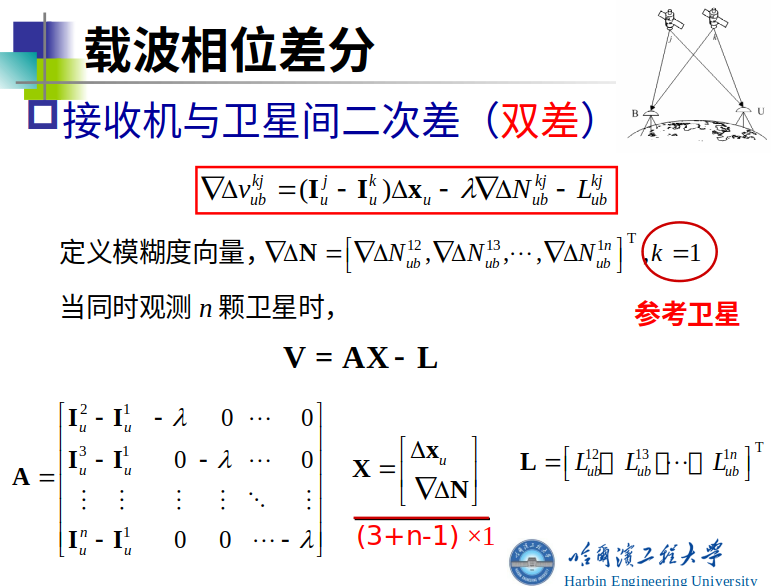
参考卫星通常选择高度角比较大的卫星,干扰比较小;
不知道双差整周模糊度的时候,这个方程应该如何求解呢,显然如果仅仅观测五颗卫星的话,那么只能列出四个观测方程,因为有一颗基准卫星,那么未知数的个数要比方程的个数要多;
观测五颗卫星,那么位置数的个数是3 + n -1 = 3 + 5 -1 = 7;双差观测方程比较少,
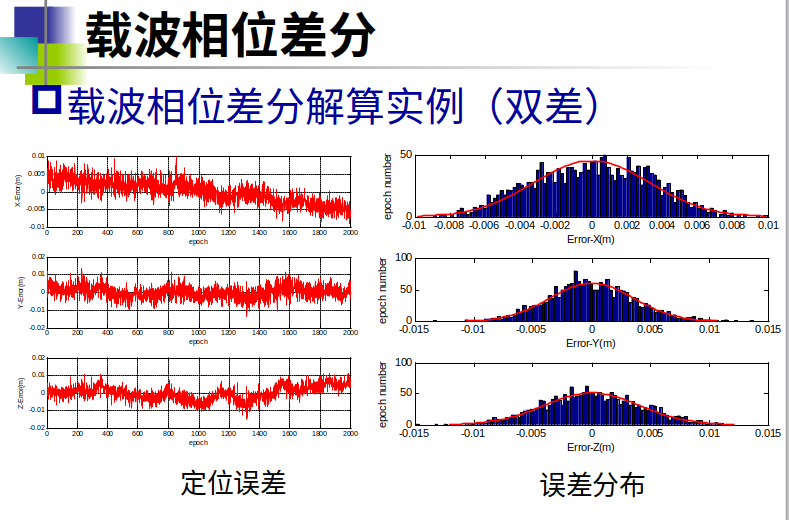
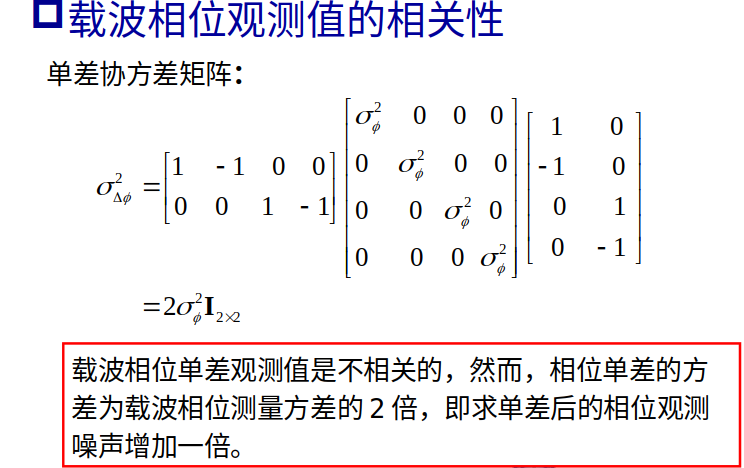
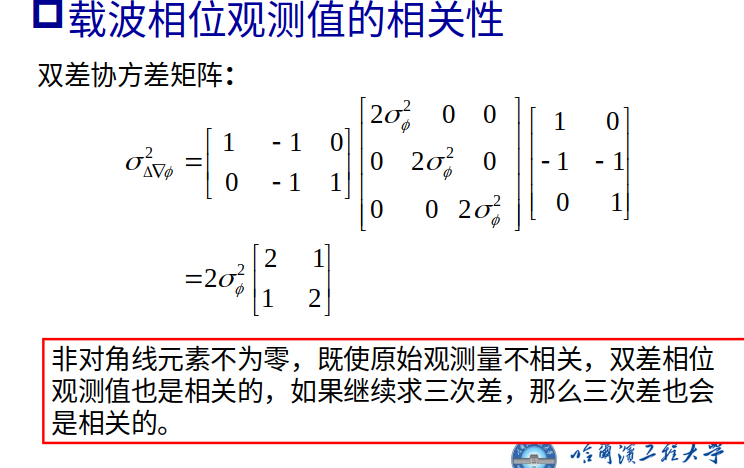
载波相位观测值的相关性




 浙公网安备 33010602011771号
浙公网安备 33010602011771号