卫星导航系统-第12讲-差分定位方法-2
位置差分原理
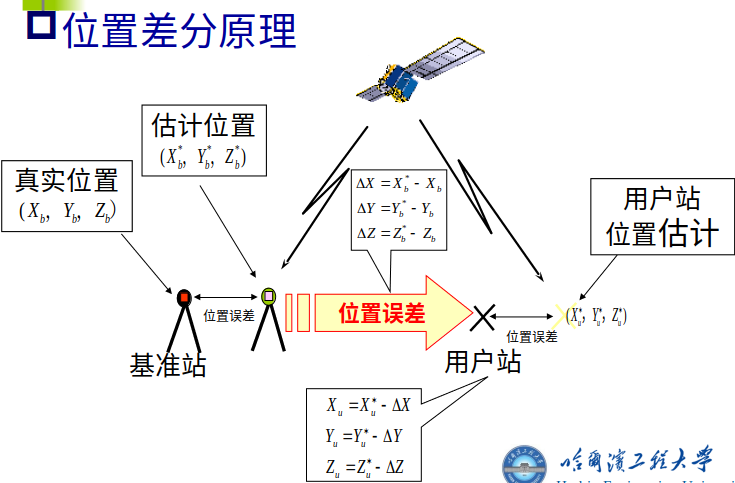
安装在基准站的导航接收机观测4颗卫星后便可进行三维定位,解算出基准站的坐标。由于存在轨道误差、时钟误差、大气影响、多路径效应以及其他的误差,解算出的坐标与基准站的精确坐标是不一样的,存在误差,基准站将此误差改正数发送给用户站,用户对解算的用户站坐标进行改正。
特点
优点: 计算方法简单,适用范围较广。
缺点: 实现位置差分原理的先决条件是必须保证基准站和用户站观测同一组卫星的情况。
适用范围:用户与基准站间距离在100km以内。
伪距差分
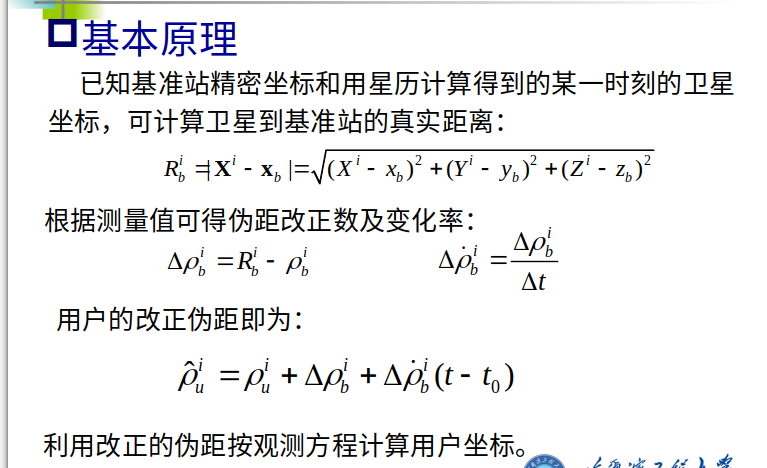
基本原理
基准站发出的改正数是基准站至各颗卫星的伪距改正数。
基准站:接收机计算出基准站至每颗可见卫星的真实距离,并将计算出的距离与含有误差的伪距测量值进行比较,求出差值,然后将所有卫星的测距误差传输给用户站。
用户站:利用接收到的测距误差估计值来改正测量的伪距。利用改正后的伪距解算出用户站的位置,可消去公共误差,提高定位精度。

基本原理
优点
伪距改正是在WGS-84坐标上进行的,得到的是直接改正数,所以可到达很高的精度。
可提供改正数及变化率,所以在未得到改正数的空隙内能继续精密定位。
基准站提供所有卫星改正数,用户只需接收4颗卫星信号,结构可简单。
缺点
与位置差分相似,伪距差分能将两站公共误差抵消,但随用户到基准站距离的增加又出现了系统误差,这种误差用任何差分法都不能消除。
基准站和用户站间距离对伪距差分的精度有决定性影响。
星历提供的卫星钟与接收机时间不精确同步,卫星实际位置和计算位置不一致。
两地测量误差始终有无法校正的剩余误差。
卫星位置误差与接收机差分误差成正比关系。
载波相位平滑伪距
用载波相位直接进行定位存在的问题

由于卫星信号收到遮挡以及干扰等等或者说接收机工作状态的原因对于载波的整周计数呢会产生丢失现象,就是上面公式里面的δNkj,这个是接收机内部通过计数器实现的,如果说信号质量有变化或者环境有变化,或者接收机工作状态有变化导致的接收机对δNkj进行计数的时候,出现了丢失的现象,这种现象就是接收机内部载波整周计数丢失,简称周跳。
载波相位平滑伪距
基本思想
一般情况下,接收机无法获得载波相位整周模糊度,但可以获得载波多普勒频率计数。实际上,载波多普勒频率计数反映了载波相位变化的信息,即反映了伪距变化率的信息。考虑到载波多普勒频率计数的精度很高,并且精确地反映了基准站伪距的变化,因此,若能利用载波多普勒频率计数来辅助码伪距测量,就可以获得比单独采用码伪距测量更高的定位精度,这种方法被称为载波相位平滑伪距(Carrier Smoothed Code, CSC)定位。
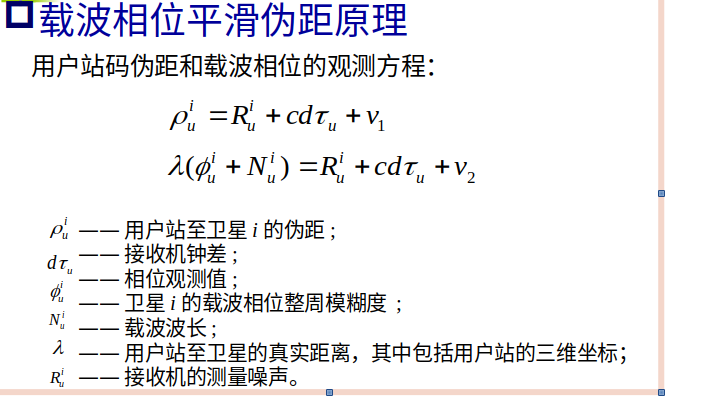
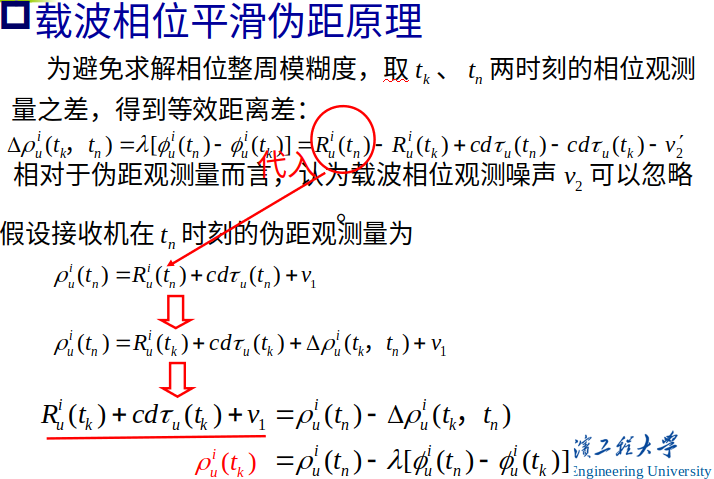
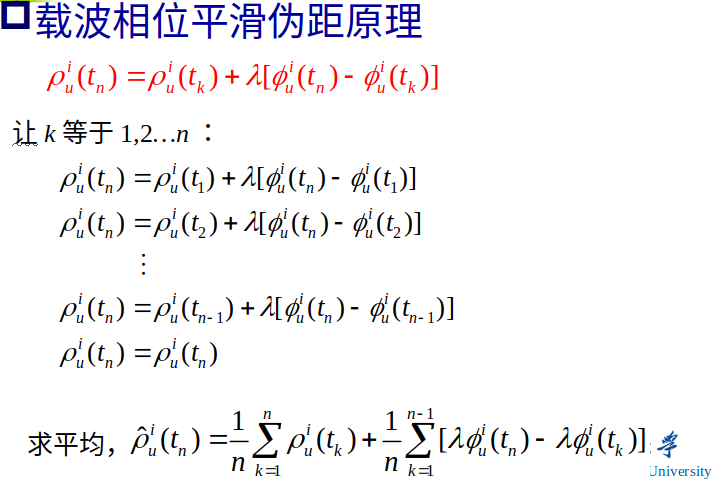
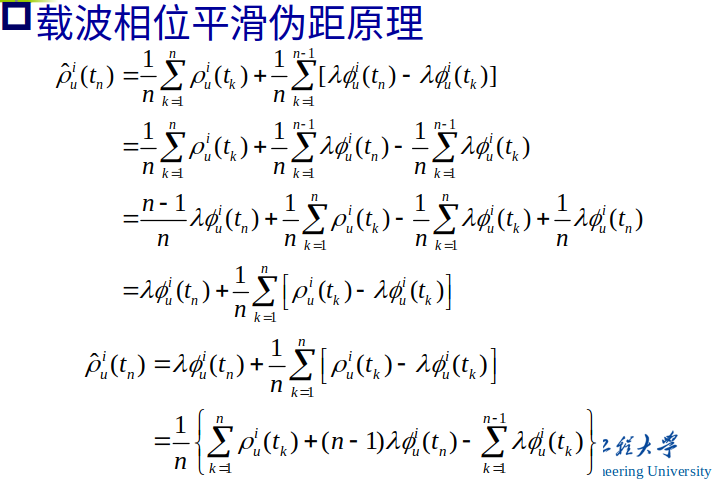
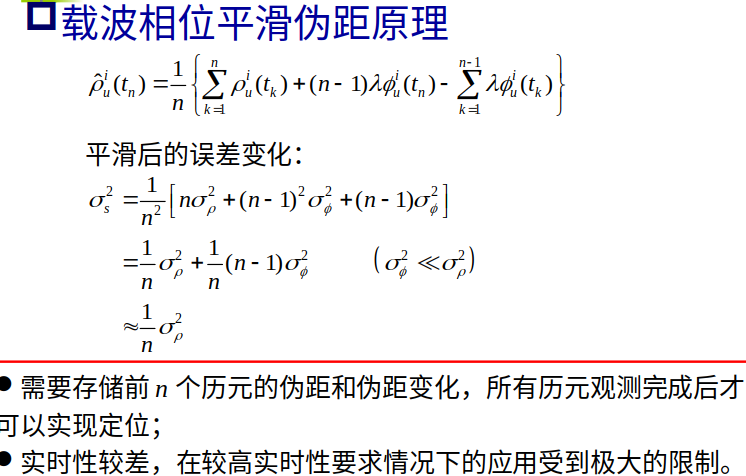
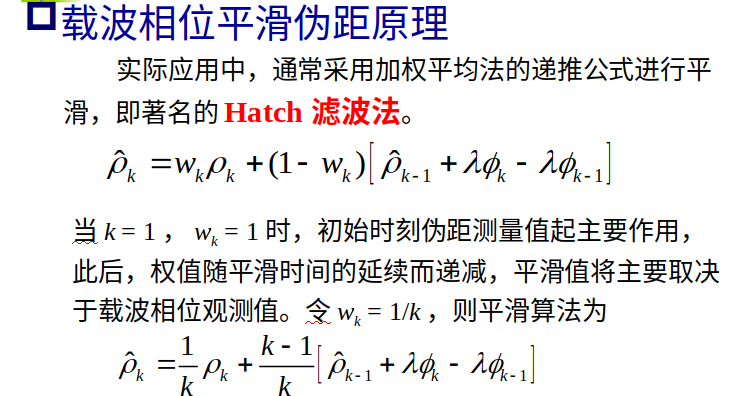
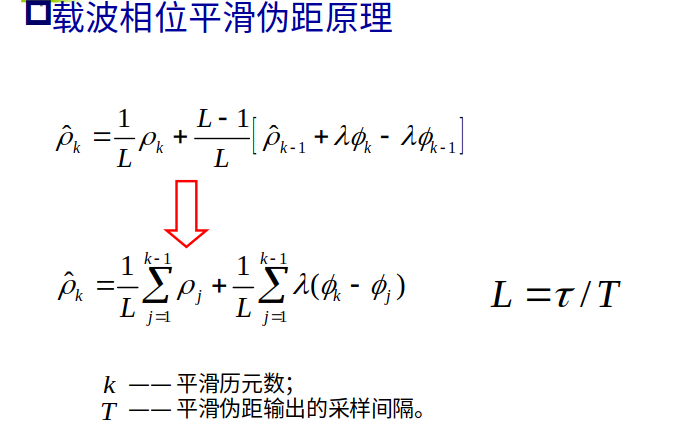
载波相位平滑伪距原理



 浙公网安备 33010602011771号
浙公网安备 33010602011771号