SL-IMU-3、4-惯性器件内参标定以及IMU温补
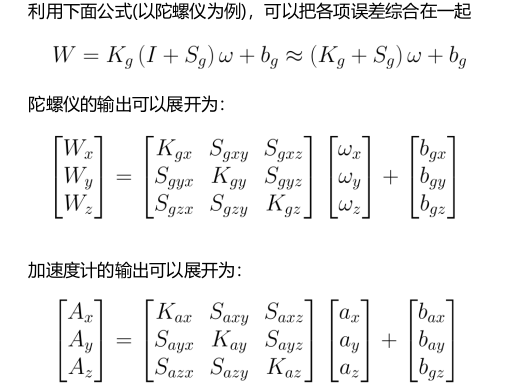
1、惯性器件内参误差模型
1)零偏
误差解释:陀螺仪或加速度计输出中的常值偏移,即常说的bias。
误差特性:由于零偏存在不稳定性,因此零偏并不是固定不变的。
解决方法:实际使用中,只能一段时间内近似为常值(这种假设带来的误差完全取决于你的时间是多长,还取决于你的器件精度是多少,至于实际中这个时间怎样取还取决于你的算法,如果这是随时间变化的值,当然取的时间越短越好,时间短也会带来其他问题,初略估计的精度可能会很差)。
2)刻度系统误差
误差解释:器件的输出往往为脉冲值或模数转换得到的值,需要乘以一个刻度系数才能转换成角速度或者加速度值,若该系数不准,便存在刻度系数误差。
误差特性:不一定是常值,它会随着输入大小的不同而发生变化,这个就是标度因数的非线性。
解决办法:如果非线性成都比较大,则需要在标定之前先拟合该非线性曲线,并补偿成线性再去做标定。

稍微解释一下:
上面的A和a的关系,真实值和模拟值之间的关系,理想情况下,二者是相等的,中间的直线,真实情况下,可能会是非线性的,如上面的曲线那样;
安装误差
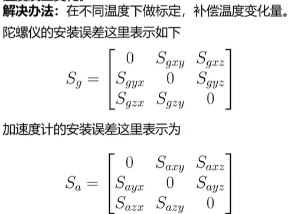
误差解释:如右图所示,b坐标系是 正交的imu坐标系,g坐标系的三个轴是分别对应三个陀螺仪。由于加工工艺原因,陀螺仪的三个轴并不正交,而且和b坐标系的轴不重合,二者之间的偏差即为安装误差。
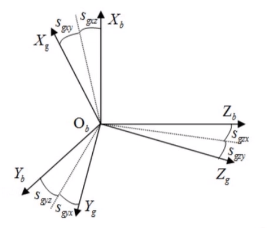
误差特性:实际系统中,由于硬件结构受温度影响,安装误差也会随温度发生变化。
解决办法:在不同温度下做标定,补偿温度变化量。
1、惯性器件内参误差模型
2、惯性器件内参误差标定
2.1 标定方法概述
标定的本质是参数辨识,参数包括陀螺仪和加速度计各自的零偏、刻度系数误差、安装误差。
辨识方法包括:
1)解析法或最小二乘
2)迭代优化方法
3)滤波(Kalman等)
常见标定方法与上面辨识方法的对应关系为:
1) 基于转台的标定: 解析法、最小二乘;
2) 不需要转台的标定: 梯度下降迭代优化;
3) 系统级标定:kalman滤波(该方法只适用于高精度惯导,本课程不做讲解)。
在IMU的误差模型中,陀螺仪和加速度计的误差方程是互相独立的,可分别标定。
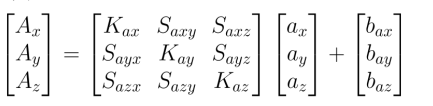
以加速度计为例,其误差模型方程为:
误差模型方程是一个包含12个未知参数的方程组,显然方程组没有唯一解。此时,通过改变输入,获得多个不同方
程(大于12个),组成的方程组便可求解参数。
以上就是分立级标定方法的思路,具体求解方法包括解析法和最小二乘法。
构建方程组时,不仅要方程组数量足够,而且要能够使误差参数可解,即系数矩阵可逆。
为了满足这一点,常见的转位方案有六位置、八位置、十二位置等。
在实际使用时,通过判断系数矩阵是否满秩便可判断,理论上,只要转位方案能满足这一条件,就可以使用。

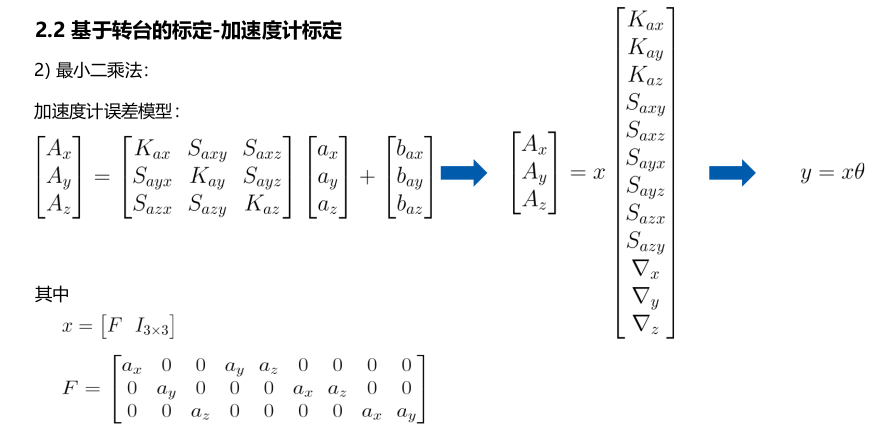
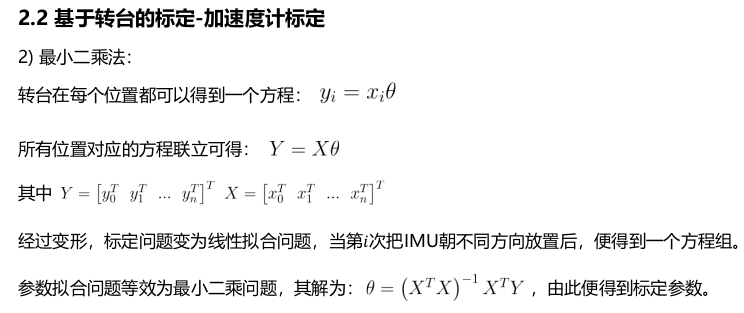
2.2基于转台的标定-加速度计标定
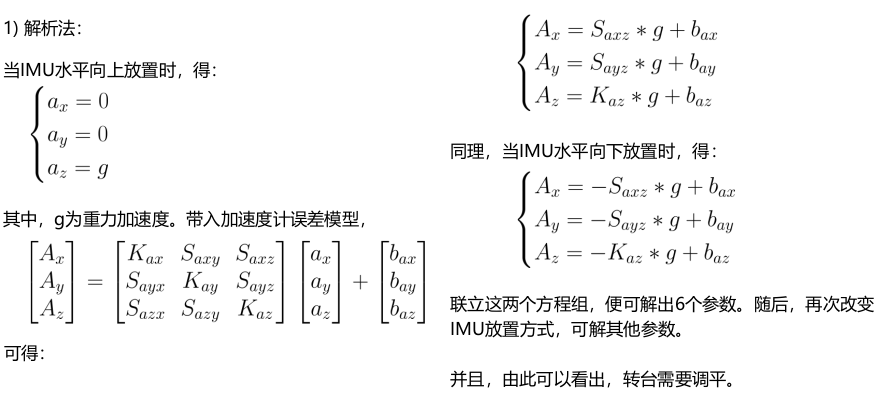
2.2 基于转台的标定-加速度计标定
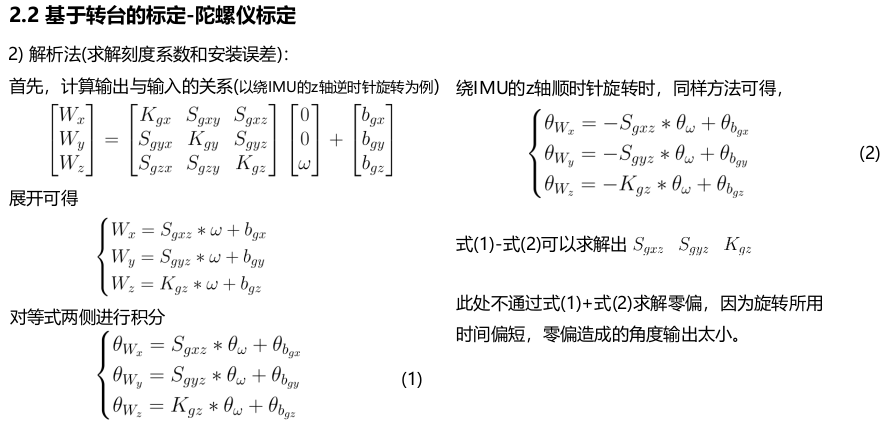
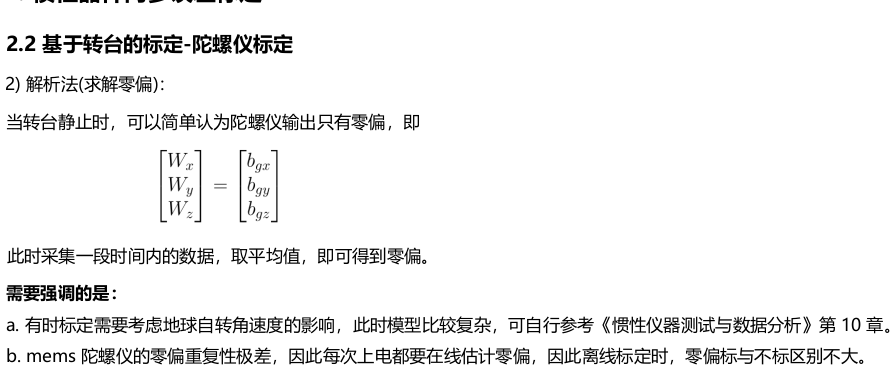
2.2 基于转台的标定-陀螺仪标定
1) 方法思想
转台一般角速度不如角度精度高,因此不是直接以角速度作为真值,而是以积分得到的角度作为真值。
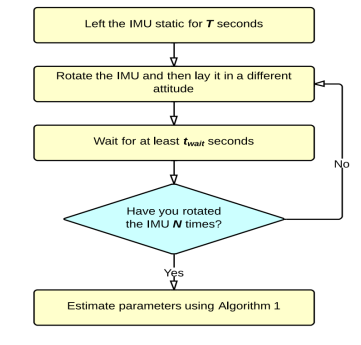
2.3不需要转台的标定
1) 整体思路
加速度输入(重力加速度)是已知的,已知值与测量值的
差异作为残差,通过优化,估计内参。
参考资料:
论文:A Robust and Easy to Implement Method for IMU Calibration without External Equipments
代码:https://github.com/Kyle-ak/imu_tk
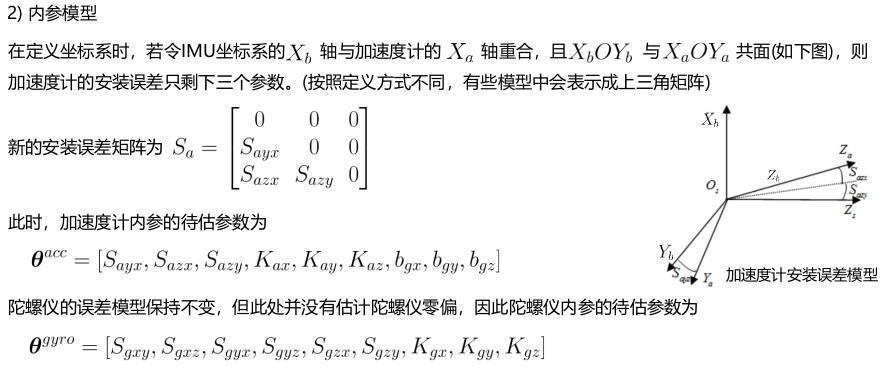
2)内参模型
2.4 标定方法比较
1) 基于转台的标定精度较高,但标定成本高;
2) 不依赖转台的标定精度差,但成本低、效率高,对一般MEMS的标定需求已经足够。
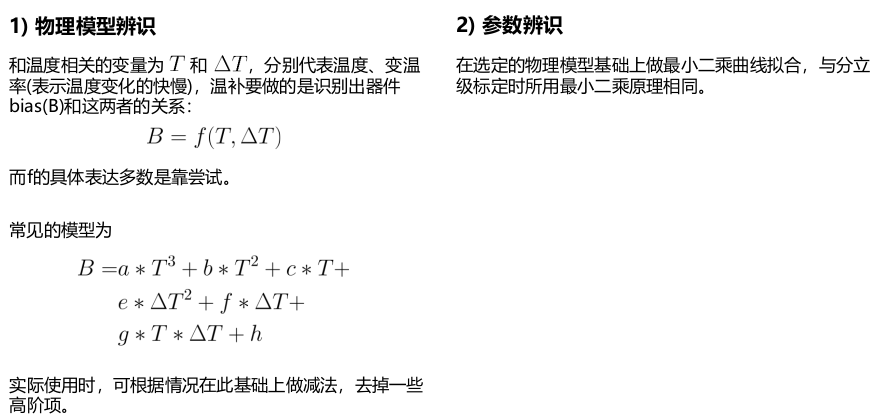
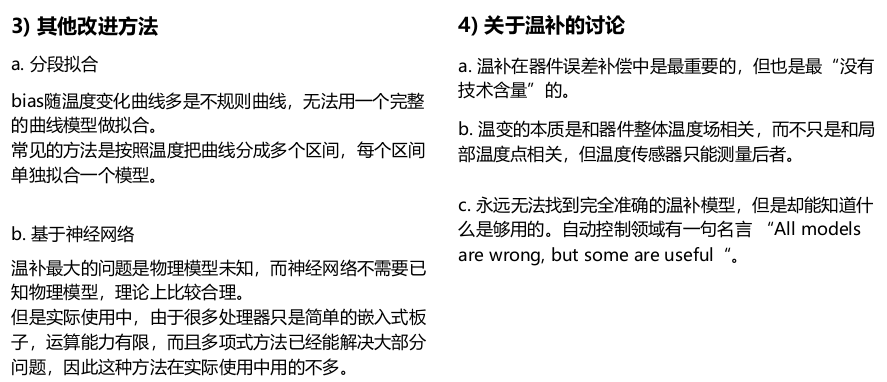
惯性器件温补
温补的本质是系统辨识,既要找出合适的物理模型,又要识别物理模型的参数。
内容:
按照不需要转台标定方法中所给出的内参模型及残差模型,推导加速度计对应残差对加速度内参的
雅可比,在开源代码中按新的内参模型 (开源代码中加速度计内参模型是上三角,本课程模型是下
三角)改成解析式求导,并使用课程给定的仿真数据做验证。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号