卫星导航系统-第7讲 GPS接收机技术-2
基带信号处理
信号的捕获(粗同步)
目的:
1.找打可见卫星;
2.估计C/A码的相位粗值;
3.估计多普勒频移粗值;
信号捕获是一个三维搜索过程,就是上面的三点;
基本原理
利用C/A码良好的自相关性和互相关性。接收机内部产生的C/A码与接收到的卫星信号完全相同时,利用相关运算实现信号解扩。
为什么要讲多普勒频率呢,因为咋捕获的时候,它会涉及到频率的初始化问题。
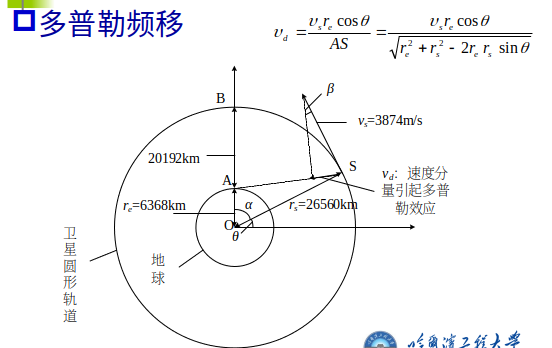
多普勒频移是由相对运动来产生的!
接收机和卫星连线上的相对运动会产生多普勒频移;
卫星在上面图中的S处,用户接收机在A点;关键计算卫星运动的速度来AS连线上的分量;
首先看一下卫星的运动速度,Vs=3874m/s;
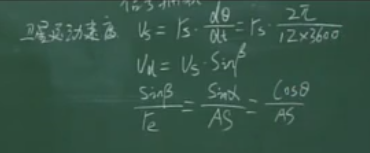
可以看出Vd和角度theta有关系
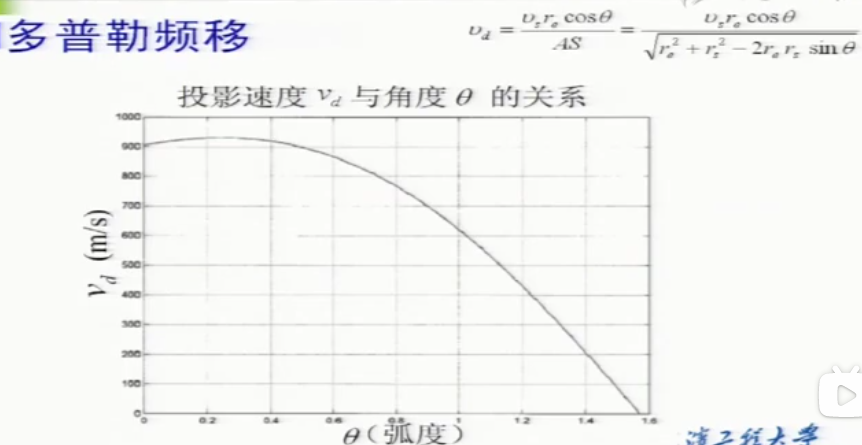
可以对上面式子进行求导,就可以求导在某个角度下的最大的vd值;
当theta为13.87度的时候,投影速度vd最大;
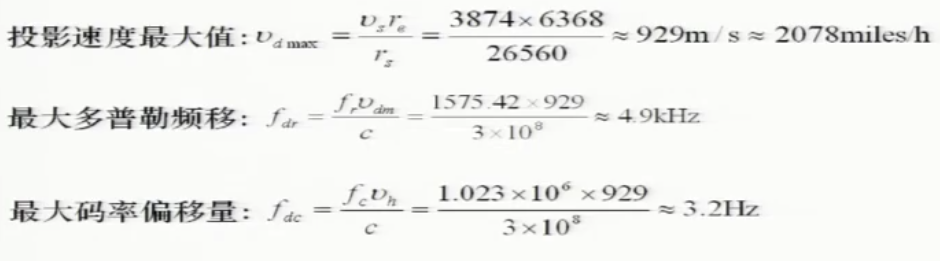
由于卫星运动,使得接收机接收到的卫星信号,这个码速率不等于1.023MHz,它会产生偏移,偏移量是3.2Hz;
载波偏移量最大是4.9kHz;
多普勒频移变化率
假设接收机为1g=9.8m/s2的的加速度,那么由于接收机移动产生的多普勒频移变化率为51.5Hz,这比卫星运动引起的多普勒频移要大得多;这就涉及到在一些高动态的运行环境中,那么在基带处理里面就需要采用一些高动态处理方法;
信号捕获的时候多普勒频移搜索的步长
由于GPS卫星相对接收机的径向运动引起的多普勒频移最大为5KHz。
由于接收机载体运动引起的最大多普勒频率为5KHz;
总的多普勒频移为10KHz(不包含由本地晶振精度引起的多普勒)。
通常在捕获过程中使用的多普勒搜索步长为500Hz。
总的多普勒搜索次数为41次;
C/A码搜索步长
C/A码一个周期有1024个码长;
一般C/A码的搜索步长为0.5个码长;
总的C/A码相位搜索次数为2046.
捕获方法:
时间串行捕获
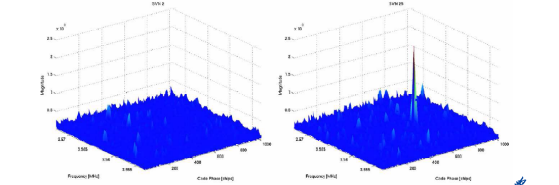
在时间域上是串行的,搜索的方法是在频率单元不同的情况下去搜索码相位,如果没找到,就换下一个频率单元,继续搜索码相位;
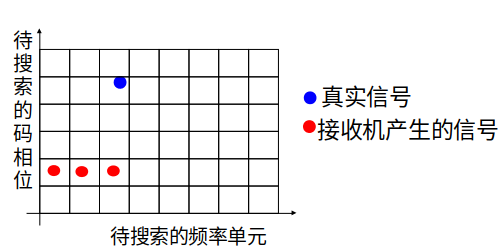
最后找到信号的峰值,然后把真实信号捕获;
输入信号

后面的n(t)看不清楚是它的噪声;
A是幅度,D(t)是数据位,C(t)是C/A码,cos()是载波,cos里面前面的f是它的中频,后面是它的多普勒,后面是接收信号的载波相位;
那么本地会产生两路信号,一路是I,另外一路是Q,二者相差90度

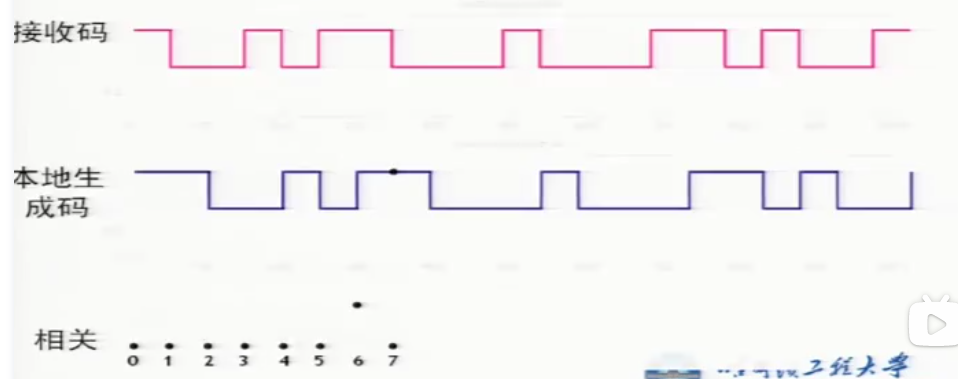
本地伪码:C/A = C(t-г)
积分输出

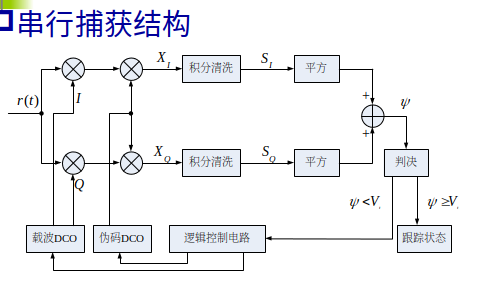
包络监波:

输入信号首先跟本地信号进行载波的混频即相乘,这一步也叫载波过滤,然后再与本地伪码进行相关,之后得到XI和XQ,经过积分清洗,也就是对相关值进行积分,积分周期为码的码周期,然后得到SI和SQ再经过平方后进行相加,得到统计量,最后对其进行判决,判断码相位跟接收的码相位进行对齐,捕获的载波多普勒频率是否在范围内。
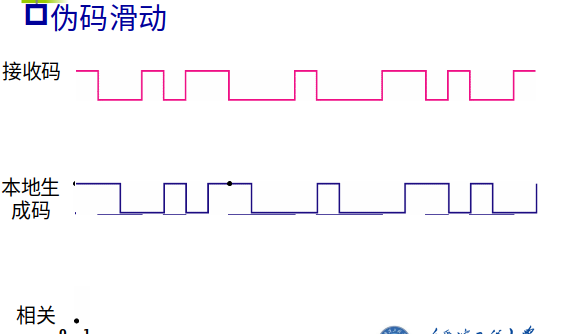
可以看出本地初始的伪码跟接收到的伪码是不对齐的,那么需要对本地码进行滑动,通过滑动改变本地伪码的相位,当两个码相差在一个码片范围内的时候,其相关值就能够体现出来,值比较大;
载波滑动
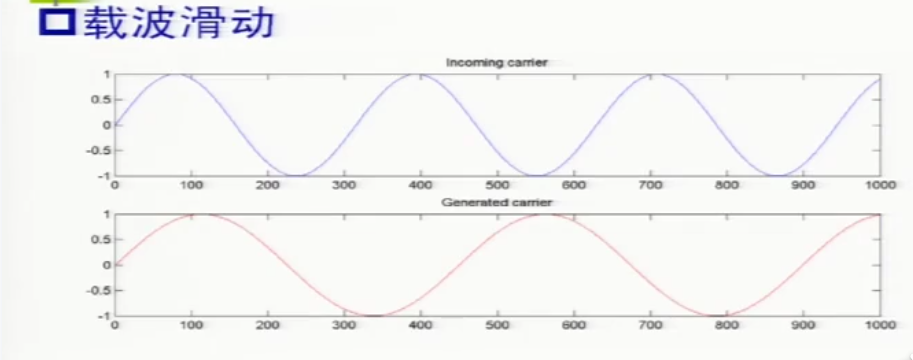
也是通过移动改变本地的载波频率,来进行相关性比较
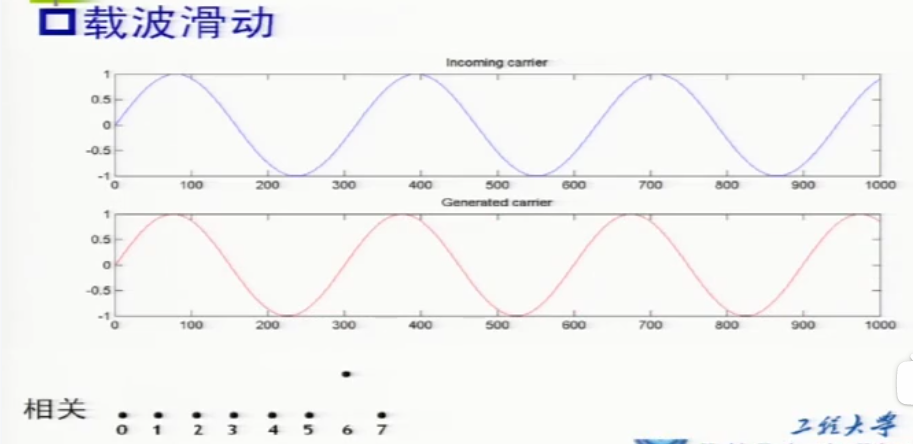
当它对齐或者频差在一定范围内的时候,其相关性就很大;
门限的影响
信号捕获判决是一个统计的过程,接收的信号有两种情况,一是只包含噪声、二是噪声与扩频信号同时存在,两种情形都有各自的概率密度函数。
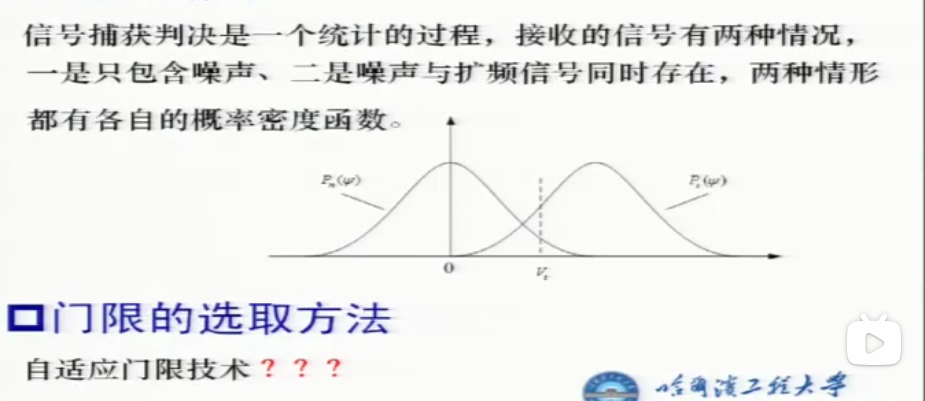
上图中,左边是只有噪声的信号,右边波形是噪声和扩频信号同时存在,那中间的虚竖线就是我们要选择的门限,故选取门限是很重要的。采用自适应选择门限来使用当地接收机的噪声水平;
捕获性能评估
捕获概率
虚警概率
漏检概率
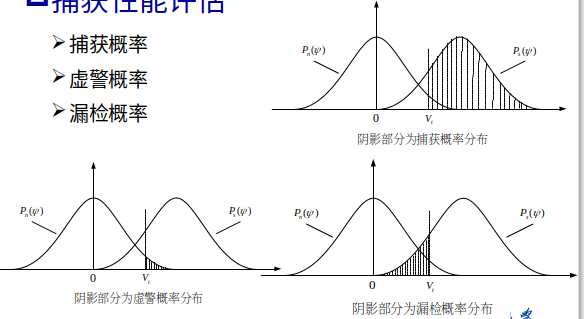
捕获判决策略:就是我捕获的统计量,是不是跟门限一比较,大于门限我们就认为它捕获到了呢,下面就是一些判决策略
搜索单元
41个频率搜索单元
2046个码相位搜索单元
总共41×2046个组合
这里还没有涉及到不同卫星的!!!!
它带来的一个问题就是捕获时间非常长;捕获时间很长,也就是说明GPS接收机的启动时间很长;
那么就要想办法提高它的捕获速率;
频率域并行捕获
对41个频率域单元进行并行捕获
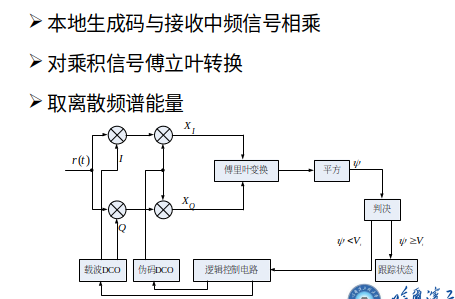
频率域并行捕获原理
将时域相关结果经傅里叶变换转换成频域信号,反映相关结果在各个频率成分处的强度,对该频率域信号的幅值大小进行分析,从中找出残余频率值及相对应的载波频率值。若本地伪码与接收伪码相位不一致,其低相关性将抑制变换后的信号幅值,从而判定伪码相位不对齐。若本地伪码与接收伪码相位对齐,变换后的信号幅值将出现明显的峰值,该峰值所对应的傅里叶变换频带频率值即为频率误差。
频率域并行捕获缺点
将时域相关结果与残余频率损耗因子成正比,其幅值随频率误差的增大而降低。尽管N点傅里叶变换理论上能给出N个频带上的检测量,但是在远离中心频率较远的频带上,检测量会遭到较大的衰减,由此导致信号捕获灵敏度性能的变差。
码相位并行捕获
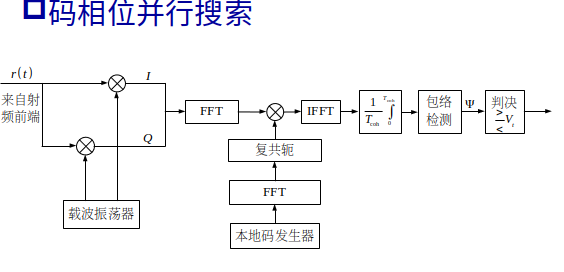
对接收信号进行载波过滤,经过过滤之后,进行傅里叶变换,本地的也进行傅里叶变换取共轭,然后与信号相乘,得到IFFT,再经过检波,得到统计量,,,
比较
传统的硬件接收机采用串行捕获技术,即将接收到的信号与本地产生的参考信号进行自相关,以一定步长搜索所有可能的多普勒频移和所有可能的码相位。
串行捕获运算简单,容易硬件实现,但是计算量非常大,时间串行捕获次数为2046*41。
软件接收机需要采用并行捕获技术。码相位并行捕获次数将搜索空间由频域并行捕获次数2046降低到41次,提高了速度。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号