IMU学习
参考https://zhuanlan.zhihu.com/p/356693537
IMU在定位、建图等系统中都是非常核心的传感器。
使用IMU时,核心问题是建立IMU测量值z与系统状态之间的关系
。建立这种关系可以采用两种形式:
1)积分
2)微分
还有一个有趣的现象,迭代形式的IMU预积分公式与直接积分公式,在重力为0的情况下,是相同的。
这样在写代码时我们可以只实现直接积分方法,把重力设成0就变成了预积分了。
1、积分形式的用法
这种方式通过积分IMU数据的形式,建立IMU与State的关系
1.1 IMU ODE
具体可参考:https://arxiv.org/abs/1711.02508
1.2在滤波算法中的用法
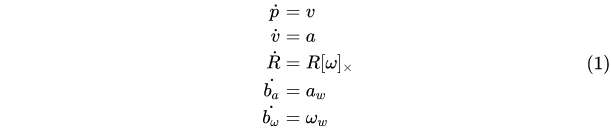
滤波算法中,如EKF,一般用IMU做状态预测。相关的系统如IMU&GPS惯导,MSCKF等。具体的就是对(1)式进行积分,将k时刻的state predict到k+1时刻。
对于上面的式子可以采用各种数值积分(欧拉、中值、RK4)计算。以Euler积分为例:

采用这个式子,就可以做EKF的预测了。状态转移矩阵/雅克比的具体形式可参考这里:https://docs.openvins.com/propagation.html
1.3在优化算法中的用法
IMU的频率远高于相机/Lidar的帧率,基于优化的系统,如VIO/LIO中,一般将两个(关键)帧之间的IMU做积分,形成与两端state的关系方程。构造这个方程有两种方法。
1.3.1直接积分法
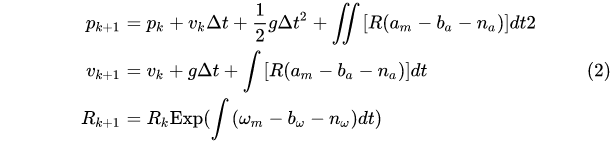
采用(2)式,对IMU进行直接积分,从上一个关键帧state推演到下一个关键帧。这样,我们可以建立下面的约束。

这种方法的缺点很明显,每次优化迭代之后, 变化,积分
就要重新计算。
但是优势也很突出,每次都重新积分,意味着更高的精度。如果对精度要求高,又不在意计算量,建议采用这种形式。
1.3.2 预积分
预积分开始由Lupton提出,后来由Forster推广到了manifold上面。李明扬在MSCKF2.0中也有提到相关的思想。最关键的Paper是https://ieeexplore.ieee.org/document/7557075
(4)式的问题是不能把约束建立成,z为常量,这种形式。这种形式的方程,当状态
变化时,也不会影响到z。预积分的精髓就在于,找到一个与状态无关的测量值z。
具体的,我们把(2)式重写一下,将积分基准设在k帧上, 就与状态无关了,就是我们的预积分量。
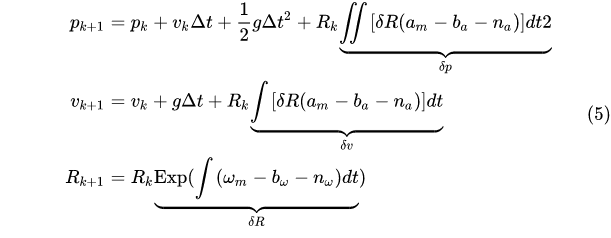
预积分的迭代形式为:
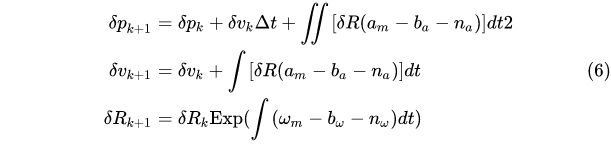
我们对比一下(6)式和(2)式可以发现一个很有意思的现象:把(2)式中的重力加速度 设置成0,(2)和(6)两者在形式上是完全相同的。就是说,迭代形式的IMU预积分公式与IMU直接积分相同。这样我们在写代码的时候,只需要写个直接积分的代码。把重力设成0就可以直接当预积分去使用。
上面的与积分假设了IMU bias不变,但是实际优化过程中 IMU bias是会变的。因此需要进行补偿。具体的是采用一阶近似。
这种近似相对于直接积分的方法就有一些精度损失。
预积分的好处是可以避免重复积分。
但是因为有一些近似,比如(7)式,所以理论上精度上不如直接积分。
具体的预积分实现和论文请可以参考:
https://github.com/borglab/gtsam/tree/develop/gtsam/navigation
https://github.com/UZ-SLAMLab/ORB_SLAM3/blob/master/src/ImuTypes.cc
https://github.com/HKUST-Aerial-Robotics/VINS-Mono/blob/master/vins_estimator/src/factor/integration_base.h
2、微分形式的用法
我们如果对IMU数据进行积分,就可以得到pose,从而可以建立IMU与state的关系。那么我们反过来想,对state进行微分,一阶微分就可以得到速度、角速度,二阶微分就可以得到加速度,这样也可以建立IMU的角速度、加速度与state的关系。
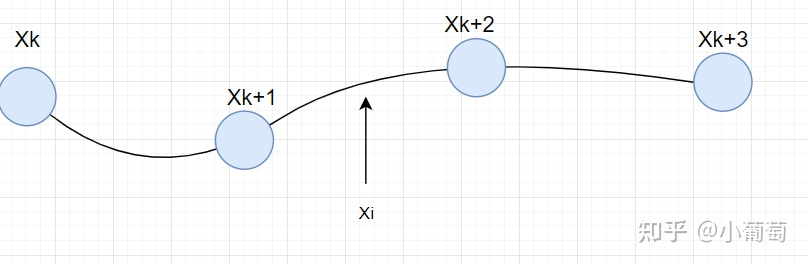
关键是如何对state进行微分呢?而且state一般是离散分布的。常用的办法是插值,给定一些离散的state,可以通过插值获取任意时刻的pose。比较常用的插值方法是b-spline。如下图,我们可以在一个IMU采样时刻,插值一个state ,由与其相邻的四个state插值而来。

对其进行相对时间的微分,可以建立与IMU的关系,即加速度的误差和角速度的误差。

具体形式,可参考:
https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=8432102
https://vision.cs.tum.edu/_media/spezial/bib/sommer19spline.pdf


 浙公网安备 33010602011771号
浙公网安备 33010602011771号