METHODS FOR NON-LINEAR LEAST SQUARES PROBLEMS-2.3 线性搜索-2.4信任区域
2.3 线性搜索
给定一个点x以及下降方向h。下一个迭代步从x沿着h的方向移动。为了找出,移动了多远,本文研究给定方程沿着half line(中线的意思??)从x方向为h,

φ(α)的一个行为例子如下图所示:
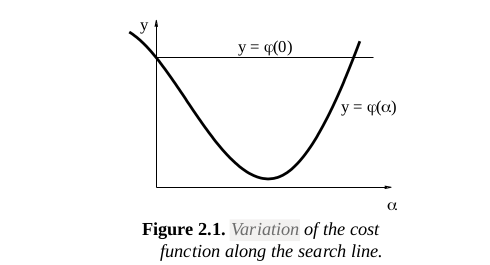
h作为下降的方向保证了(前提是h作为下降方向),上图中F’(x)的导数小于0,在a=0处;

如果a充分小,表明满足下降条件(2.1),等价于
φ(α) < φ(0)
通常,我们给出一个a的初始猜测,例如a=1用牛顿方法,上图证明了三个不同的情形出现
1、α is so small that the gain in value of the objective function is verysmall. α should be increased.
2、α is too large: φ(α) ≥ φ(0). Decrease α in order to satisfy the descent condition (2.1).
3、α is close to the minimizer 1) of φ(α). Accept this α-value.
一个精确的线性搜索是一个迭代的过程产生一系列a1,a2,....。目标是找到真正的最小ae在(2.7)中定义,当迭代as满足如下,则停止

没明白上面的!!!!!????
2.4Trust Region and Damped Methods
假设有一个模型L,这个模型是F在当前迭代x的附近的行为,如下

 这部分的基本意思可能归纳为模型的其他形式,但是在本册子里面我们只讨论(2.14)中给出的L形式。通常,这个模型是F在x周围的一个二阶泰勒展开式,L(h)可能是这个展开的一个近似。通常认为当h足够小的时候,这是一个好的模型。我们将介绍两个方法来决定步长h,h是下降的方向。
这部分的基本意思可能归纳为模型的其他形式,但是在本册子里面我们只讨论(2.14)中给出的L形式。通常,这个模型是F在x周围的一个二阶泰勒展开式,L(h)可能是这个展开的一个近似。通常认为当h足够小的时候,这是一个好的模型。我们将介绍两个方法来决定步长h,h是下降的方向。
在信任区域方法中,我们认为我们知道一个正数δ,以便这个模型以δ为半径的一个球体内这个模型是充分精确的,球体的中心在x,步长的决定如下:

在阻尼方法中,步长定义如下:

上面阻尼参数μ大于等于0. 阻尼项被认为是惩罚大的步长的情况。
阻尼项被认为是惩罚大的步长的情况。
算法2.4的核心部分是基于上面两个方法之一,形式如下:

如果步长h满足式(2.1)的下降条件,对应于a=1,否则,a=0,例如不移动。但是,不能在x处卡住(除非x = x*):通过适当调整δ或者μ,旨在在下一步迭代中获得更好的结果。
因为L(h)被认为是当h很小的时候,是对F(x+h)的一个好的近似,出现步长失败的原因是因为h太大了,应该被减小。进一步,如果步长被接受,这有可能在新一轮迭代时使用更大的步长,因此可以减少到达x*所需要的步长数量。
在计算的步长下,模型的质量可以通过所谓的增益率来评价

例如这个比率是函数的实际值之差与预测值之差的比率。
按照以上结构分母是正的,分子是负的如果这个步长不是下降的话----这太大了,应该被减小。
用信任区域的方法,我们通过半径δ的大小来监控步长。下面的更新策略被广泛使用:

因此,如果 <1/4,我们决定用更小的步长,当大于3/4表明有可能使用更大的步长。一个信任区域算法在阈值1/4和3/4之间值的变化不会敏感,除数p1=2或者倍数p2=3,p1和p2的选择很重要以便δ值不会震荡。
<1/4,我们决定用更小的步长,当大于3/4表明有可能使用更大的步长。一个信任区域算法在阈值1/4和3/4之间值的变化不会敏感,除数p1=2或者倍数p2=3,p1和p2的选择很重要以便δ值不会震荡。
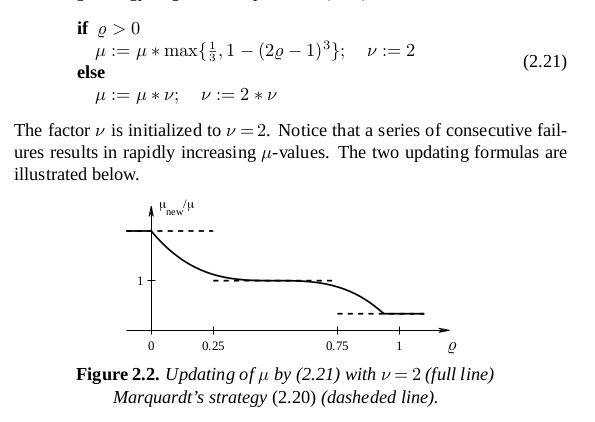
在阻尼方法中一个小的值表明我们应该增加阻尼因子,因此对大的步长增加惩罚项。一个大的值表明L(h)是对F(x+h)一个好的近似,阻尼应该被减小。一个被广泛应用的策略如下,类似于(2.19)

同样的,在阈值0.25与0.75之间的小的变化,本方法不会敏感,或者p1=2,p2=3也不会敏感,但是p1和p2的选择很重要以便μ值不会震荡。经验表明在阈值0.25和0.75之间的不连续的改变可能会引起“颤震”,这会减慢收敛,以下策略更常用:
2.4.1 步长的计算。
在阻尼算法中,这一步作为函数的驻点来计算

这就意味着hdm是下面的解答

从(2.14)中L(h)的定义我们可以知道是等同于如下的

I是单位矩阵,如果μ充分大,对称矩阵B+μI是正定的,则其服从定理1.8,hdm是L的最小取值部分。
例子2.1 在阻尼牛顿算法中,模型L(h)由c=F’(x)以及B=F‘’(x)给定,以及(2.22),形式如下:

hdn称为阻尼牛顿步,如果μ是非常大,那么

例如在接近最速下降法的方向上的一个小的步长,另一方面,如果μ很小,那么hdn是接近于牛顿步hn。因此,我们认为阻尼牛顿方法作为最速下降法和牛顿法的一个混合方法。
在3.2节中我们回到阻尼方法
在一个信任区域方法中步长htr是对一个约束优化问题的解答,

如果在(2.14)中矩阵B是正定的,那么L的无约束最小问题的解如下:

如果这是充分小的(满足) ,这是期望的步长htr。否则,约束是激活的,问题就更加复杂。
,这是期望的步长htr。否则,约束是激活的,问题就更加复杂。
最后,我们提出在阻尼方法和信任区域方法之间的两个相似性假设B是正定的:在无约束中,最小值是在信任区域外,证明存在一个λ>0以便有

通过对方程重新排序,将它与(2.22)相比较,得出htr与阻尼步长hdm(阻尼参数μ=λ)是一致的。另一方面,也可以证明如果在给定μ大于等于0,我们计算hdm,有

例如hdm与htr相等对应于信任区域半径δ=||hdm||。因此,这两类方法是相关的,但是没有一个简单的方程可以把他们在δ和μ值在给出相同的步基础上联系起来。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号