2.轨迹优化
轨迹优化离不开:安全走廊,距离地图,非线性优化,凸优化。
1.fast planner/ ego planner
高飞教授的开源项目,整个框架值得学习。
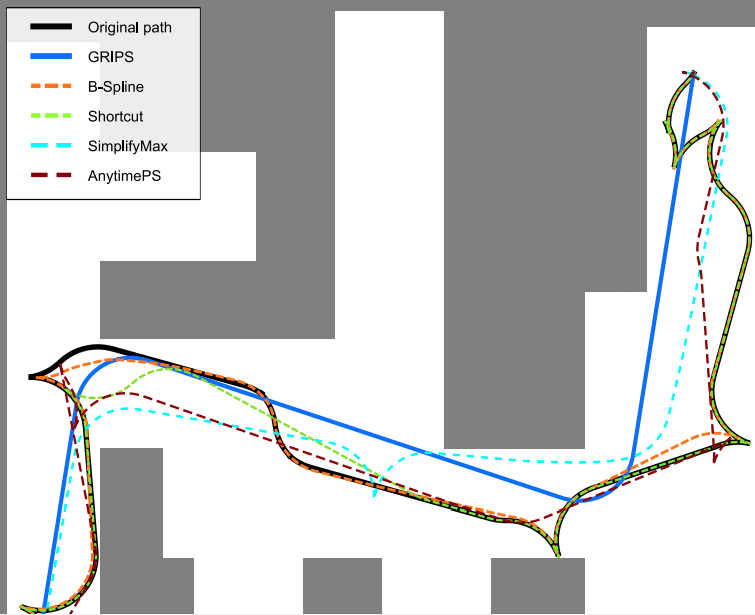
2.grips
https://github.com/eric-heiden/grips
Gradient-Informed Path Smoothing for Wheeled Mobile Robots
值得研究一下。
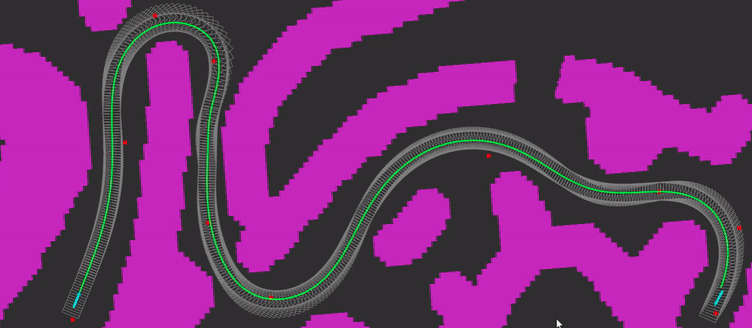
3.path_optimizer
https://github.com/LiJiangnanBit/path_optimizer
看上去也不错,OSQP求解,耗时还可以。
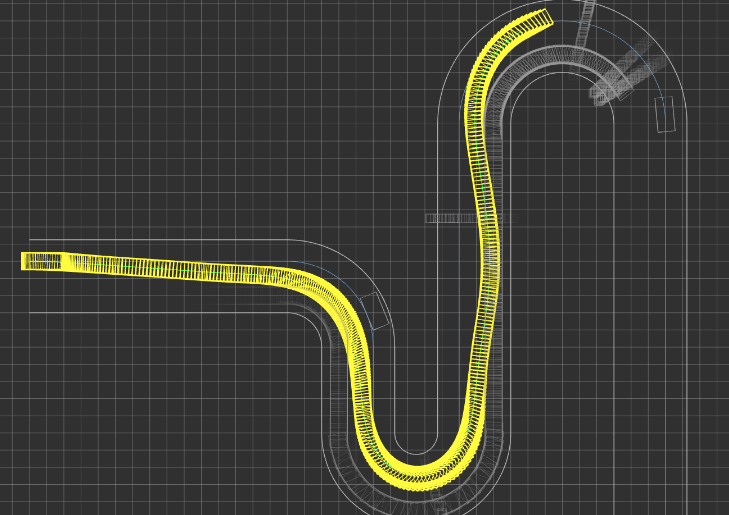
4. CartesianPlanner
李柏教授的轨迹优化,看过他出的两本书,非线性优化。
https://github.com/libai1943/CartesianPlanner
5.Multi-robot Trajectory Planner
https://github.com/LIJUNCHENG001/multi_robot_traj_planner
多车轨迹规划,难得是差分驱动底盘的。IPOPT求解。
6.faster
https://github.com/mit-acl/faster
Gurobi Optimizer求解。各种轨迹优化,描述清楚以后,就是求解器取求解了。