
1.距离地图和路径居中
为了使得路径规划的结果居中,需要使用距离地图,下边总结几种方法。
1.jps3d中的距离地图
https://github.com/KumarRobotics/jps3d
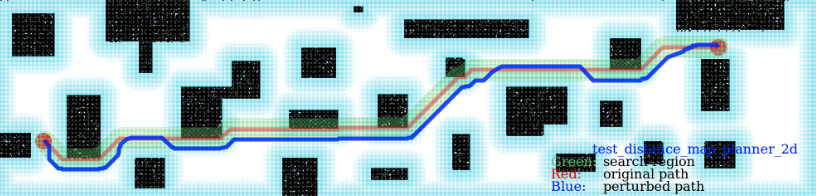
具体算法没有研究,耗时太长了。基于搜索的方法倒是可以借鉴,通过在A*搜索中,g值添加距离障碍物的权重,可以达到路线原理或者贴近障碍物的效果。
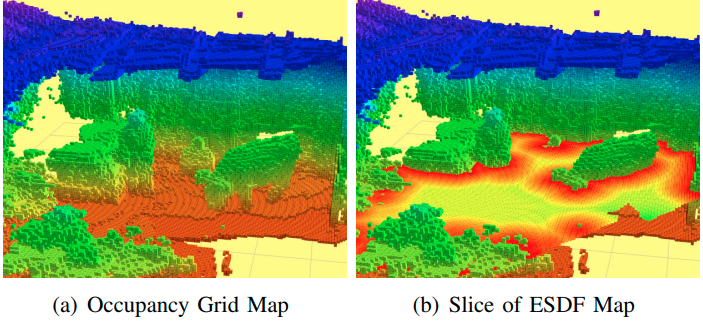
2.Fiesta
https://github.com/HKUST-Aerial-Robotics/FIESTA
非常高效的实时构建,值得学习。
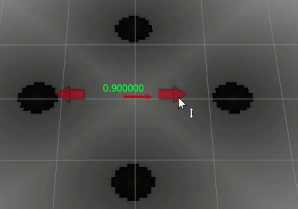
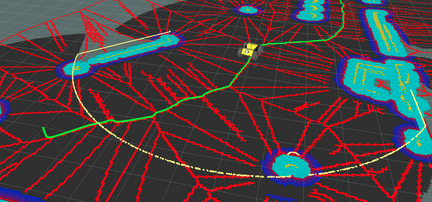
OpenCV距离变换函数:distanceTransform(),项目中的costMapToMat,matToDistanceMap,等一些处理方法,还是很有用的。耗时也很少,可以实时使用。另外可以得到voronoi图,比下边的个快很多。
opencv中的函数处理一些栅格地图的问题,还是非常快的。
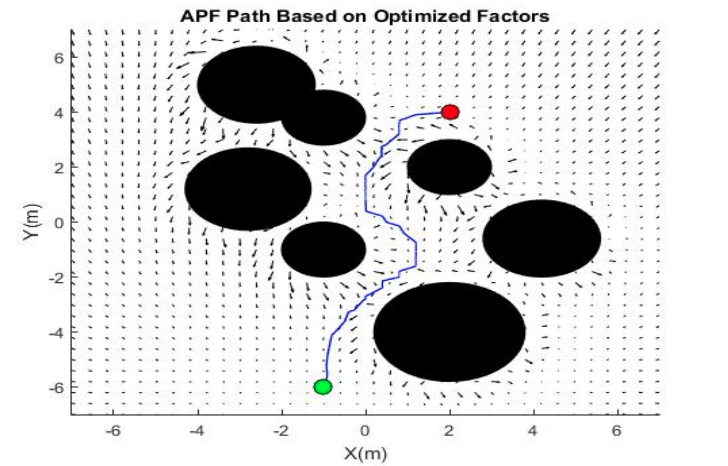
5.AFP人工势场法
这个方法也可以得到原理障碍物的路径,没有研究过
下一篇记录一下在获取esdf后,如何进行轨迹优化,使得路径远离障碍物。

