2021.07.09-关于Admissible Heuristic-论文
论文《An Admissible Heuristic to Improve Convergence in Kinodynamic Planners Using Motion Primitives》
最近遇到的问题是,lattice plannner很难到点,虽然加上了dubins shot,但是还是有些情况下一直在终点附近扩展,却到达不了。
归根到底,因为用Dijkstra作为启发值,本身就不合适,那我模仿混合A*的做法,取max(Dijkstra, dubins),在终点附近又不敢用,因为可能转圈。
本文提出了一种基于motion primitives的运动规划的Admissible Heuristic,这种启发值可以用于任何基于motion primitives的运动规划算法,并且是admissible的。这么厉害的么。
运动规划问题描述
系统方程:

轨迹:

cost criterion:
平移不变性:
主要就是根据这个性质,来生成motion primitives库的。


启发式函数:
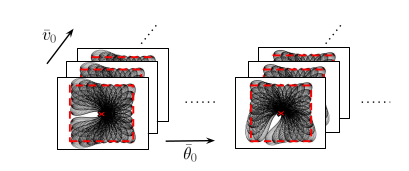
A. 轨迹库
在box内,生成一些motion primitives
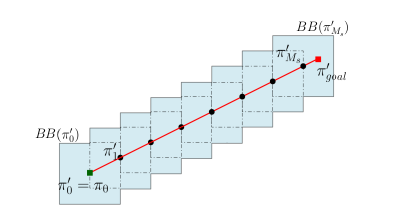
B.启发式函数
没看懂,大概就是连接当前点到终点,形成了很多个box,而box里边有轨迹。怎么计算一下。
different cost metrics:
虽然文章核心没看懂,但是这里还是有收获的。不同的cost metrics,可以体现不同的heuristic,文中介绍了两种:
A.最小时间 最小能量
独轮模型,适合差速底盘,状态空间(x, y, theta, v):

控制输入:
cost function, 这个就是常规用的啦,最小化输入的平方:

其中![]() ,
, ![]()
两点之间的轨迹就是motion primitives,属于两点边界值问题,TPBVP,但是没有讲如何求解。现在需要的就是这个,如何求解汽车底盘或者差速底盘的BVP问题


B.乘客舒适
car-like 模型:




根据IOS 2631-1标准的定义,乘客舒适度与r.m.s acceleration aw有关(加速度均方根)


目标函数: