


2021.07.08-state space lattice论文阅读1
无人车的state space lattice,作者是Thomas M,有几篇需要看一下,这是第一篇
论文:《State Space Sampling of Feasible Motions for High Performance Mobile Robot Navigation in Highly Constrained Environments》
本文应用场景:
全局路径-->path following-->local lattice planner
本文核心:
本文讲的是local planner,即如何构建搜索空间,生成单层Lattice,并没有进一步做启发式搜索。
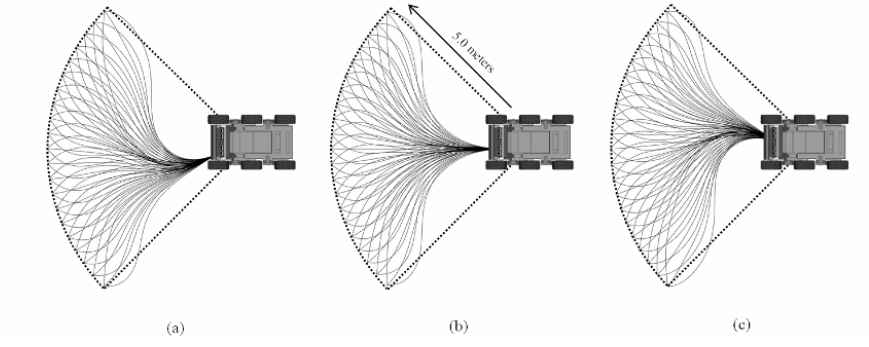
1.构建状态空间的Search Space
horizon是5米,扇形45度,每个采样终点分为3个方向。
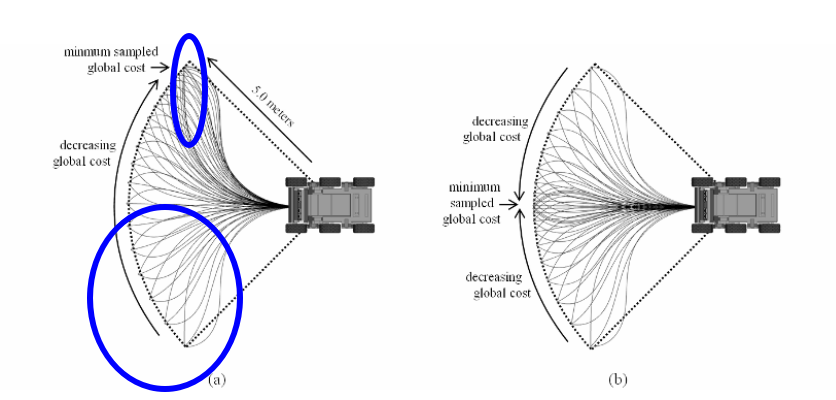
2. 利用Global Guidance信息
3. Model-Based Trajectory Generation
当前状态到各个采样状态之间的轨迹,通过下边论文的方法生成,是可以实时的。《Howard, T.M. and Kelly, A. (2006). Optimal Rough Terrain Trajectory Generation for Wheeled Mobile Robots》
开源项目:
https://github.com/amslabtech/state_lattice_planner
项目介绍说参考了本论文,但是感觉应该是仅仅用了构建搜索空间的方法,单层lattice是离线生成的,并没有用作者的Optimal Rough Terrain Trajectory Generation方法。
总结:
我比较关心的是Optimal Rough Terrain TrajectoryGeneration是怎么实现的,也就是无人车的两点边界值问题是如何求解的!

