两个不同三维坐标系间的变换
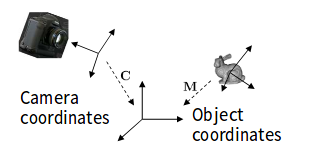
目标:将目标坐标系下的点变换到相机坐标系下。
已知条件:1、物体坐标系到世界坐标系的变换矩阵M ;2、相机坐标系到世界坐标系的变换矩阵C;3、物体坐标系下的点P
变换公式:Pcamera=C-1MPobject
Eigen::Vector4f v4; Eigen::Matrix4f T=C.inverse()*M; //对机器人坐标系下的所有点进行变换 for (auto & p:context.points_) { v4<<p.x,p.y,p.z,1; v4=T*v4; p.x=v4(0); p.y=v4(1); p.z=v4(2); }
列出主要的思路,细节的部分需要精确求解两个变换矩阵。

