
8.17模拟赛小结
前言
最卡常的一集
T1 激光通讯 原题
题意:给你一个大小不超过 \(100\times 100\) 的矩阵 其中有一个起点,终点和一些障碍物 求从起点到终点不碰到障碍物的最小转弯次数
思考 一开始肯定是想记忆化 dfs 但是那样写了下发现麻烦 于是 改成了 bfs
容易发现转弯次数能小就小 所以将普通的队列改成一个堆即可
时间复杂度 \(O(n^2\log n^2)\)
Code
#include<bits/stdc++.h>
#define N 105
using namespace std;
int n,m,sx,sy,ex,ey,ans=1e9;
char c[N][N];
int vis[N][N][2];//0横1竖
int dx[]={0,0,1,-1},dy[]={1,-1,0,0};
struct point {
int x,y,w,v;
};
bool operator < (point a,point b)
{
return a.v>b.v;
}
priority_queue <point> q;
void bfs()
{
q.push((point){sx,sy,0,0});
q.push((point){sx,sy,1,0});
while(!q.empty())
{
point x=q.top();
q.pop();
if(x.x>n||x.y>m||x.x<1||x.y<1||c[x.x][x.y]=='*') continue;
if(x.x==ex&&x.y==ey)
ans=min(ans,x.v);
vis[x.x][x.y][x.w]=1;
for(int i=0;i<2;i++)
{
int xx=x.x+dx[i],yy=x.y+dy[i];
if(vis[xx][yy][0]) continue;
q.push((point){xx,yy,0,x.v+x.w});
}
for(int i=2;i<4;i++)
{
int xx=x.x+dx[i],yy=x.y+dy[i];
if(vis[xx][yy][1]) continue;
q.push((point){xx,yy,1,x.v+1-x.w});
}
}
}
int main()
{
ios::sync_with_stdio(0);
cin.tie(0),cout.tie(0);
cin>>m>>n;
for(int i=1;i<=n;i++)
for(int j=1;j<=m;j++)
{
cin>>c[i][j];
if(c[i][j]=='C')
if(sx==0) sx=i,sy=j;
else ex=i,ey=j;
}
bfs();
cout<<ans;
return 0;
}
T2 树
题意:已知一棵二叉树点的编号为 \(1\to n\) 且中序遍历也为 \(1\to n\) 给出这棵树的层次遍历 求这棵树的先序遍历
思考:了解过平衡树 BST 堆之类的就知道 原树就是一个 BST 因此满足左儿子小于根 右儿子大于根的性质 因此每个子树都必定是一个区间 然后这个子树的根就是层次遍历最靠前的点 于是用一棵线段树维护即可 时间复杂度 \(O(n\log n)\)
#include<bits/stdc++.h>
#define N 300005
using namespace std;
int n,a[N],id[N];//id:每个数的下标
int tr[4*N];
void Pushup(int x)
{
if(id[tr[x*2]]>id[tr[x*2+1]]) tr[x]=tr[x*2+1];
else tr[x]=tr[x*2];
}
void builds(int l,int r,int x)
{
if(l==r)
{
tr[x]=l;
return;
}
int mid=(l+r)/2;
builds(l,mid,x*2);
builds(mid+1,r,x*2+1);
Pushup(x);
}
int query(int l,int r,int L,int R,int x)
{
if(l>R||r<L) return -1;
if(l>=L&&r<=R) return tr[x];
int mid=(l+r)/2;
int ls=query(l,mid,L,R,x*2),rs=query(mid+1,r,L,R,x*2+1);
if(ls==-1) return rs;
if(rs==-1) return ls;
if(id[ls]>id[rs]) return rs;
return ls;
}
void solve(int l,int r)
{
if(l>r) return;
int root=query(1,n,l,r,1);
printf("%d ",root);
solve(l,root-1);
solve(root+1,r);
}
int main()
{
scanf("%d",&n);
for(int i=1;i<=n;i++)
scanf("%d",&a[i]),id[a[i]]=i;
builds(1,n,1);
solve(1,n);
return 0;
}
T3 石头剪刀布
\(n\le 2000\)
很毒瘤
错误的思路:前\(i\)个数最长上升序列长度为\(j\) 钦定每次最后取的数是 \(k\) 的方案数
因为这道题要求的是全局 所以不能钦定一个点
运用全局 dp
设全局状态 \(f_{i,p_0,p_1,p_2}\) 表示到了 \(i\) 时结尾是 \(0,1,2\) 的最长串长度为 \(p_0,p_1,p_2\) 考虑转移
易得初始化状态 \(f_{0,0,0,0}=1\) 若当前第 \(i\) 位取了 \(1\) 根据一个小 dp 可知\(f_{i-1,p_0,p_1,p_2}\) 就应该贡献给 \(f_{i,p_0,max(p_0+1,p_1),p_2}\) 所以可以根据这个 枚举 \(i,p_0,p_1,p_2\) 最后统计答案时将 \(f_{n,p_0,p_1,p_2}\) 贡献给 \(ans_{max(p_0,p_1,p_2)}\)即可
时间复杂度 \(O(n^4)\) 可以得到 40pts
Code
#include<bits/stdc++.h>
#define N 55
#define ll long long
using namespace std;
ll mod=998244353;
int n,a[N][8];
char c[8];
int f[N][N][N][N],ans[N];
void add(int &x,int &y)
{
x=(1ll*x+1ll*y)%mod;
}
int main()
{
scanf("%d",&n);
for(int i=1;i<=n;i++)
{
scanf("%s",c+1);
for(int j=strlen(c+1);j>=1;j--)
a[i][c[j]-'0']=1;
}
f[0][0][0][0]=1;
for(int i=1;i<=n;i++)
{
for(int p0=0;p0<=i;p0++)
for(int p1=0;p1<=i;p1++)
for(int p2=0;p2<=i;p2++)
{
if(a[i][0]) add(f[i][max(p0,p2+1)][p1][p2],f[i-1][p0][p1][p2]);
if(a[i][1]) add(f[i][p0][max(p1,p0+1)][p2],f[i-1][p0][p1][p2]);
if(a[i][2]) add(f[i][p0][p1][max(p2,p1+1)],f[i-1][p0][p1][p2]);
}
}
for(int p0=0;p0<=n;p0++)
for(int p1=0;p1<=n;p1++)
for(int p2=0;p2<=n;p2++)
add(ans[max(p0,max(p1,p2))],f[n][p0][p1][p2]);
for(int i=1;i<=n;i++)
printf("%d ",ans[i]);
return 0;
}
考虑优化这个 dp
容易发现有很多多余状态
可知 \(p_0,p_1,p_2\) 其中一个是从任意其它一个加 \(1\) 转移过来的 因此 它们两两之间的差不可能大于2 为什么?已知
\(p_0\ge p_2+1\)
\(p_1\ge p_0+1\)
\(p_2\ge p_1+1\)
结合三项试 若满足其中两项 则剩余一项一定不满足 因此它们的差是不会超过 \(2\) 的
所以可以剪枝优化状态
时间复杂度可以优化成 \(O(n^2)\) 结合 map 可以艹出 70pts
但是还是过不了 我们需要优化空间
容易发现因为是围绕一个数不动的 所以可以使用 偏移量 来减少空间复杂度 优化成 \(n^2\) 的
这样理论上就能通过此题了
但是坑点还是有的 比如偏移量要选对 还要判断是否大于 \(0\)
先放一个假 AC 版本的 因为卡常还是 70pts T了
#include<bits/stdc++.h>
#define N 2005
#define ll long long
using namespace std;
ll mod=998244353;
int n,a[N][8];
char c[8];
int f[N][N][5][5],ans[N];
void add(int &x,int &y)
{
x=(1ll*x+1ll*y)%mod;
}
int main()
{
scanf("%d",&n);
for(int i=1;i<=n;i++)
{
scanf("%s",c+1);
for(int j=strlen(c+1);j>=1;j--)
a[i][c[j]-'0']=1;
}
f[0][0][2][2]=1;
for(int i=1;i<=n;i++)
{
for(int p0=0;p0<=i;p0++)
for(int p1=p0+2;p1>=max(p0-2,0);p1--)
for(int p2=p0+2;p2>=max(p0-2,0);p2--)
{
if(a[i][0]) add(f[i][max(p0,p2+1)][p1-max(p0,p2+1)+2][p2-max(p0,p2+1)+2],f[i-1][p0][p1-p0+2][p2-p0+2]);
if(a[i][1]) add(f[i][p0][max(p1,p0+1)-p0+2][p2-p0+2],f[i-1][p0][p1-p0+2][p2-p0+2]);
if(a[i][2]) add(f[i][p0][p1-p0+2][max(p2,p1+1)-p0+2],f[i-1][p0][p1-p0+2][p2-p0+2]);
}
}
for(int p0=0;p0<=n;p0++)
for(int p1=p0+2;p1>=max(p0-2,0);p1--)
for(int p2=p0+2;p2>=max(p0-2,0);p2--)
add(ans[max(p0,max(p1,p2))],f[n][p0][p1-p0+2][p2-p0+2]);
for(int i=1;i<=n;i++)
printf("%d ",ans[i]);
return 0;
}
然后我们选择卡常,具体为:
- 加上 O2 火车头
- 手写 %
- 手写
max - 使用滚动数组
- 加上
reg和inline
成功从4000ms卡成500ms
#include<bits/stdc++.h>
#pragma GCC optimize(1)
#pragma GCC optimize(2)
#pragma GCC optimize(3,"Ofast","inline")
#define N 2023
#define reg register
#define ll long long
using namespace std;
int mod=998244353;
int n,a[N][8];
char c[8];
int f[2][N][6][6],ans[N];
inline void add(int &x,int &y)
{
x=x+y>mod ? x+y-mod:x+y;
}
inline int max(int x,int y)
{
return x>y ? x:y;
}
int main()
{
scanf("%d",&n);
for(reg int i=1;i<=n;i++)
{
scanf("%s",c+1);
for(reg int j=strlen(c+1);j>=1;j--)
a[i][c[j]-'0']=1;
}
f[0][0][2][2]=1;
for(reg int i=1;i<=n;i++)
{
memset(f[i&1],0,sizeof f[i&1]);
for(reg int p0=0;p0<=i;p0++)
for(reg int p1=p0+2;p1>=max(p0-2,0);p1--)
for(reg int p2=p0+2;p2>=max(p0-2,0);p2--)
{
if(a[i][0]) add(f[i&1][max(p0,p2+1)][p1-max(p0,p2+1)+2][p2-max(p0,p2+1)+2],f[(i-1)&1][p0][p1-p0+2][p2-p0+2]);
if(a[i][1]) add(f[i&1][p0][max(p1,p0+1)-p0+2][p2-p0+2],f[(i-1)&1][p0][p1-p0+2][p2-p0+2]);
if(a[i][2]) add(f[i&1][p0][p1-p0+2][max(p2,p1+1)-p0+2],f[(i-1)&1][p0][p1-p0+2][p2-p0+2]);
}
}
for(reg int p0=0;p0<=n;p0++)
for(reg int p1=p0+2;p1>=max(p0-2,0);p1--)
for(reg int p2=p0+2;p2>=max(p0-2,0);p2--)
add(ans[max(p0,max(p1,p2))],f[n&1][p0][p1-p0+2][p2-p0+2]);
for(reg int i=1;i<=n;i++)
printf("%d ",ans[i]);
return 0;
}
T4 快递员
题意:给出 $n\times m4的矩阵 每次给出两种操作
- 1 更改一个点为障碍物/通行
- 2 查询两点最短路
\(n\leq 5,m\leq 5\times 10^5,q\leq 5\times 10^4\)
无语了 刚才知道第四题题干错了 加上这句:
- 任意时刻不允许往左走
有这种东西就可以考虑了
把询问拆成一列一列的就行了
先预处理好一列内的 \(dis_{i,j}\) 表示从 \(i\) 到 \(j\) 的距离 如果中间有障碍物就把它赋值成 \(inf\) 即可
现在考虑怎么考虑合并
如果考虑合并相邻的两列 怎么和?
容易得到 \(dp\) 式
\(disc_{i,j}=\min(disa_{i,k}+disb_{k,j}+1)\)
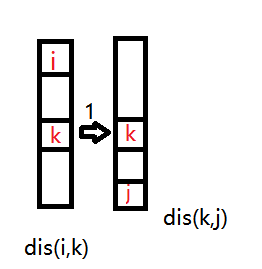
看图一眼理解
然后就会得到一个新的块 这个块也可以合并
然后用线段树维护一下即可
注意:因为 \(m\) 很大 所以不能每次 updata 暴做 需要建树
时间复杂度 \(O(mn^3+qn^3\log m)\)
Code
#include<bits/stdc++.h>
#define M 200005
#define ll long long
using namespace std;
int n,m,q;
struct node{
int r[6][6];
int n;
}tr[4*M],t;
int a[6][M];
node clear(int x)
{
node c;
c.n=n;
for(int i=1;i<=c.n;i++)
for(int j=1;j<=c.n;j++)
c.r[i][j]=1e9;
if(x)
for(int i=1;i<=c.n;i++)
c.r[i][i]=-1;
return c;
}
node operator *(node a,node b)
{
node c=clear(0);
for(int i=1;i<=c.n;i++)
for(int j=1;j<=c.n;j++)
for(int k=1;k<=c.n;k++)
c.r[i][j]=min(c.r[i][j],a.r[i][k]+b.r[k][j]+1);
return c;
}
node change(int x)
{
node c=clear(0);
for(int i=1;i<=n;i++)
{
for(int j=1;j<=n;j++)
{
int p=0;
for(int k=min(i,j);k<=max(i,j);k++)
if(a[k][x]==0) p=1;
if(p) c.r[i][j]=1e9;
else c.r[i][j]=abs(i-j);
}
}
return c;
}
void Pushup(int x)
{
tr[x]=tr[x*2]*tr[x*2+1];
}
void updata(int l,int r,int L,int x)
{
if(l>L||r<L) return;
if(l==r)
{
tr[x]=change(l);
return ;
}
int mid=(l+r)/2;
updata(l,mid,L,x*2);
updata(mid+1,r,L,x*2+1);
Pushup(x);
}
node query(int l,int r,int L,int R,int x)
{
if(l>R||r<L) return t;
if(l>=L&&r<=R) return tr[x];
int mid=(l+r)/2;
node ls=query(l,mid,L,R,x*2),rs=query(mid+1,r,L,R,x*2+1);
if(ls.n==-1) return rs;
if(rs.n==-1) return ls;
return ls*rs;
}
void build(int l,int r,int x)
{
if(l==r)
{
tr[x]=change(l);
return ;
}
int mid=(l+r)/2;
build(l,mid,x*2);
build(mid+1,r,x*2+1);
Pushup(x);
}
int main()
{
t.n=-1;
scanf("%d%d%d",&n,&m,&q);
for(int i=1;i<=n;i++)
for(int j=1;j<=m;j++)
scanf("%d",&a[i][j]);
build(1,m,1);
while(q--)
{
int opr,sx,sy,ex,ey;
scanf("%d%d%d",&opr,&sx,&sy);
if(opr==1)
{
a[sx][sy]^=1;
updata(1,m,sy,1);
}
else
{
scanf("%d%d",&ex,&ey);
node c=query(1,m,sy,ey,1);
printf("%d\n",c.r[sx][ex]==1e9? -1:c.r[sx][ex]);
}
}
return 0;
}

