CMU Database Systems - Indexes
这章主要描述索引,即通过什么样的数据结构可以更加快速的查询到数据
介绍Hash Tables,B+tree,SkipList
以及索引的并行访问
Hash Tables
hash tables可以实现O(1)的查询,设计主要考虑两点
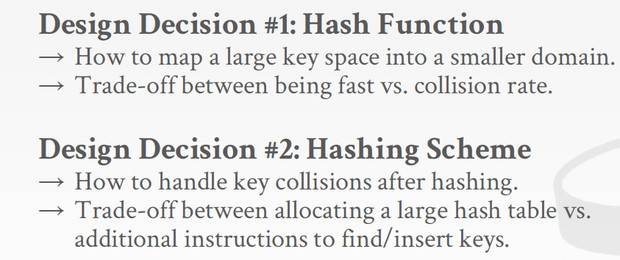
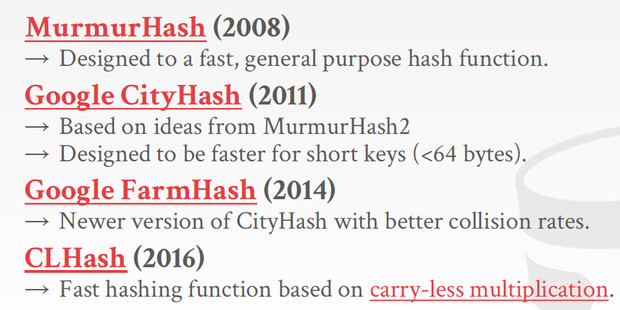
首先用什么hash function?底下列出常用的hash function
然后怎么解决collisions?即hash schemes
首先是static hash schemes
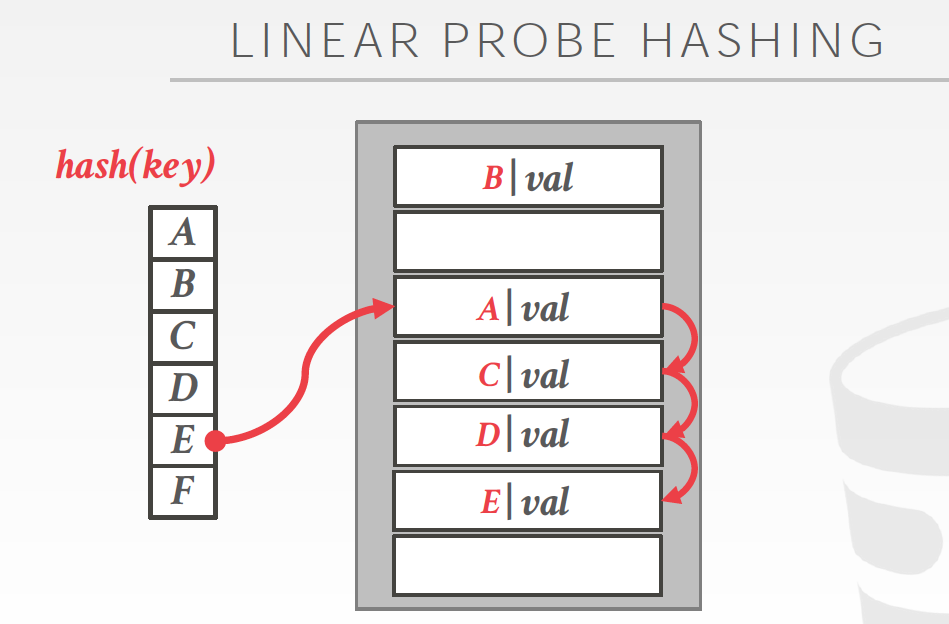
第一个方法是Linear probe hashing
方法,如果发现冲突,就往后找,直到找到一个free的slot,所以要同时记录下key和value,这样才好去比对每个key是不是要找的
问题如图,会出现bad case,比如对于E,需要跳很多步才能找到,这样查询就从O(1)变成O(n)了
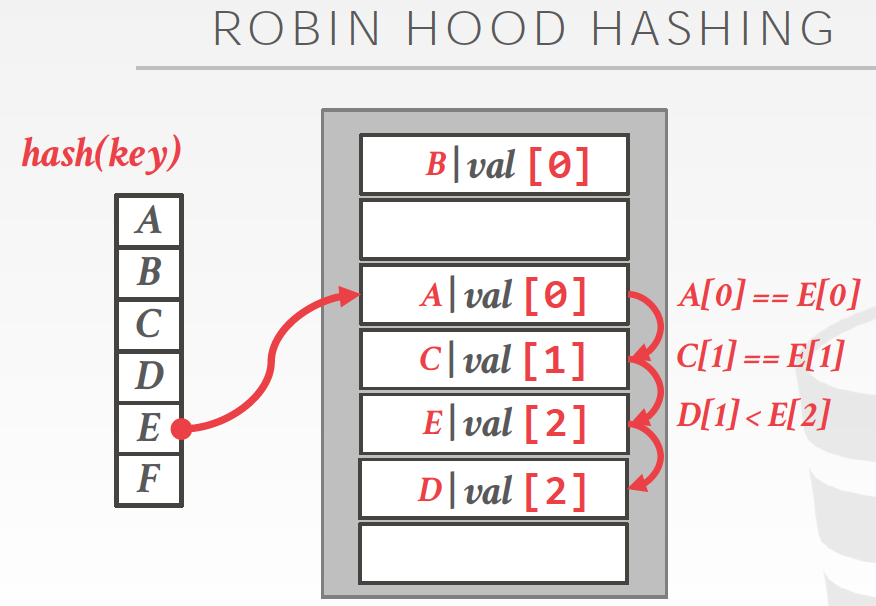
Robin Hood Hashing
像名字一样,罗宾汉,劫富济贫,解决badcase
首先存储到时候,要加上跳数,jump几次;然后根据jump数比较,来判断是否要做平均
左图,如果不用robin hood方式,D为1跳,E为3跳
右图,用robin hood后,D和E都变成2跳

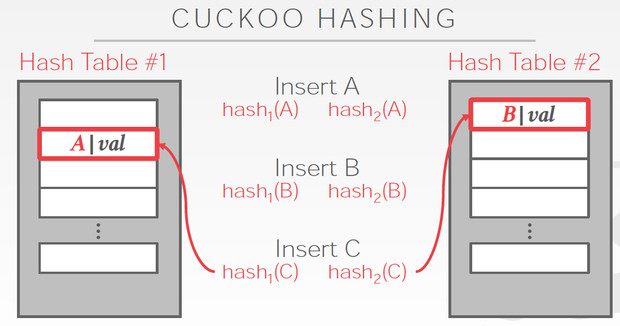
Cuckoo Hashing
简单的说,用多个hash table,对于一个数据,哪边空就存哪边
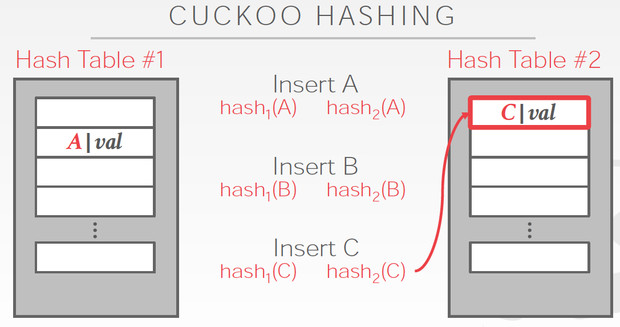
但是对于当前这个C,两边都冲突,他解决的思路是,
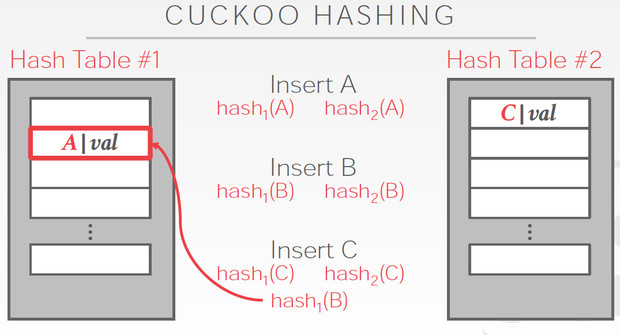
C两边都冲突那肯定是解不了,那我先把C随便存一边,这样如图,我们就要解决B的冲突
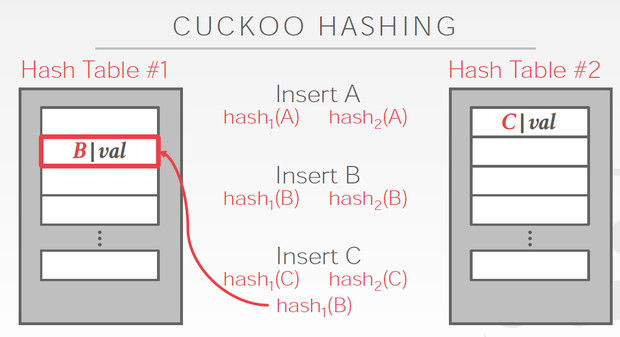
B只能去替换A,最终A可以存在另一张表里面,所以冲突解决
这个方法明显的好处是查询路径短,最多两次
问题是,插入性能容易比较差,如果冲突比较多,有可能死循环,所以如果出现这些情况,就要去降低冲突率,比如增加hash table的大小,或者增加hashtable的个数
但这样变化后,需要完全重新rebuild

static hash schemes的问题就是,容量有限,一旦超出扩容的话,就需要整个索引完全rebuild
所以就需要Dynamic hash table
最直白的想法是Chained Hashing,hash值对应的是buckets,不存在collision,因为buckets是可以无限扩展的
问题是,数据多了,就变成O(n)了
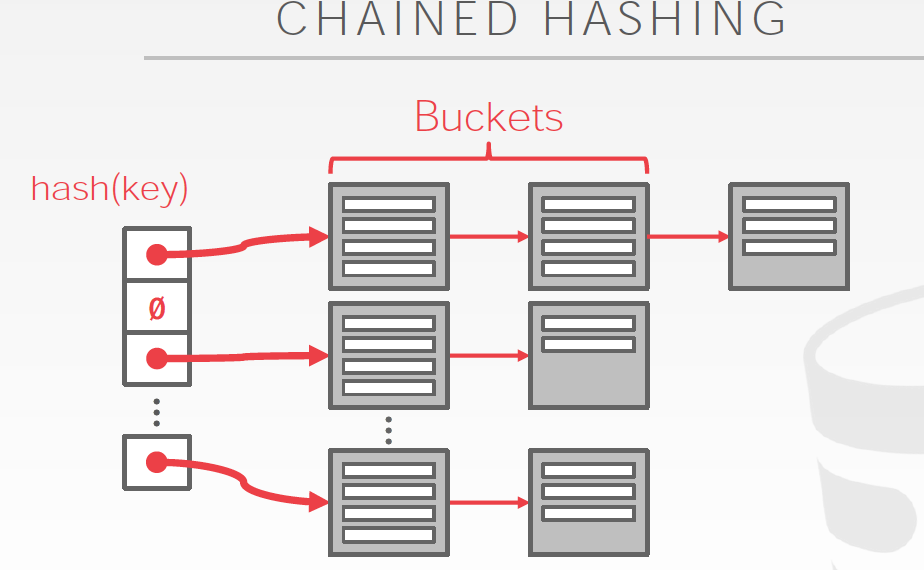
上面的方法的问题是,随着数据的增多不断的增加bucket,但是没有没有增加目录大小,最终对应到目录中一条的数据越来越多,失去了index的意义
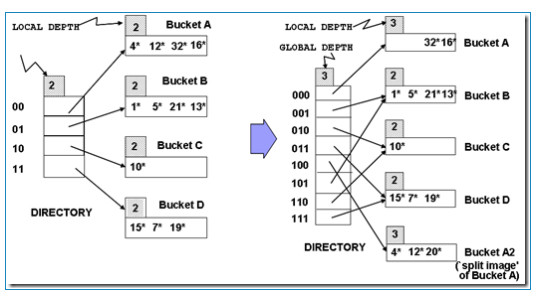
Extendible hashing
这个方法难理解些,
首先这里的hash函数是根据前几位去分bucket,depth的意思是几位
比如,用2位分bucket,目录大小为4,不够了就用3位去分bucket,目录大小就是8
Global depth是目录用几位,local depth其实只是个标识,表示这个bucket用的是几位,
因为只要有一个分区的bucket满了,并且如果这个分区只对应一个目录item,那么目录就需要扩展,global depth会增加
比如下图中,00指向bucketA,已经4个数满了,还要加一个,只有分离bucket,这个时候就需要扩展目录,global depth=3,其中000,001分别指向一个bucket
但是其他的bucket没满啊,所以他们的local depth还是2,并且在新的目录中,有两个item指向depth为2的bucket
但这时来个9,落在bucketB,B也满了,需要分裂,但是这个时候就不需要扩展目录,因为B本身就有两个目录item指向,正好可以分开
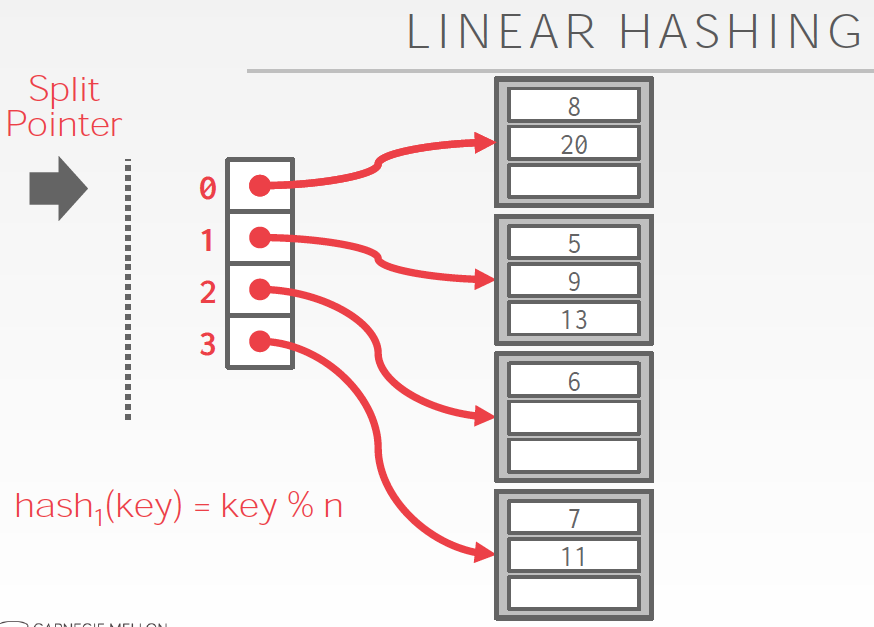
Linear Hashing
这个的思路也是逐步的分裂bucket,但他和extendible hashing相比,不需要维护这个目录
http://queper.in/drupal/blogs/dbsys/linear_hashing,这个链接里面的例子非常清楚
基本思想,
初始bucket数是4,按4取模分bucket,很容易理解
问题是,如果有某个bucket满了,怎么处理?
首先把overflow的数据用一个临时bucket存下来
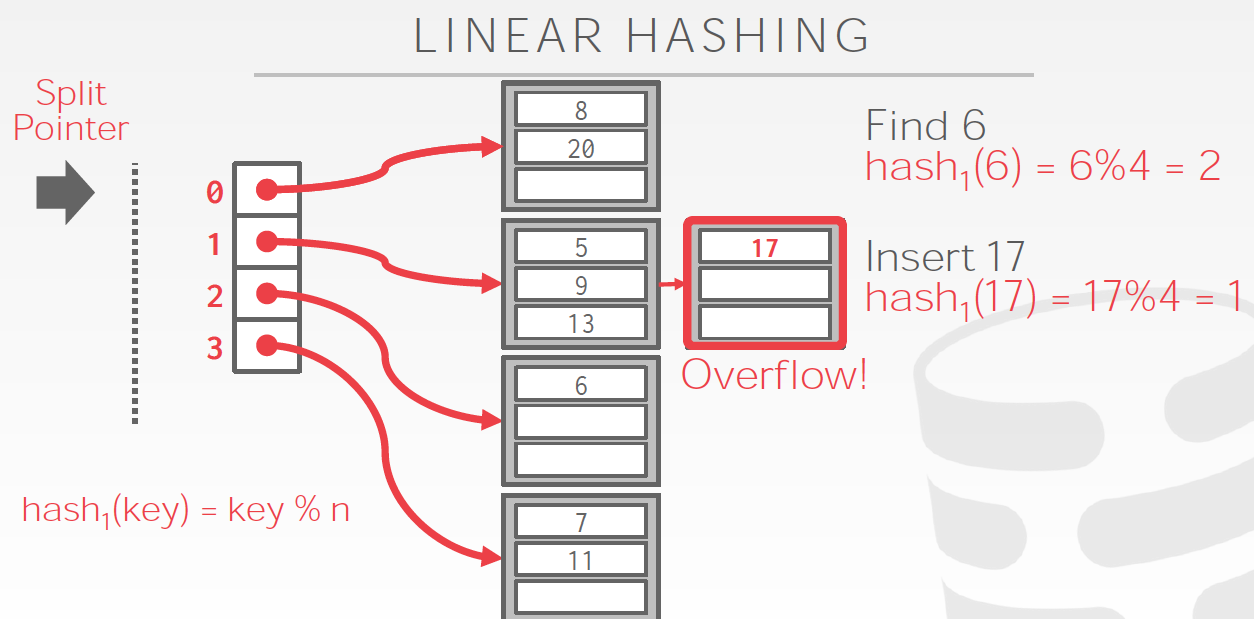
然后接着要做bucket分裂,
这里bucket分裂的过程比较trick是逐步完成的,最终达到的是bucket翻倍
因为要一个个bucket分裂,所以这里有个split point,表示当前分裂到哪个bucket了
这里很难理解的是,他不是分裂overflow的那个bucket,而且按顺序一个个分裂;感觉一次把所有bucket全split掉,也没啥问题
如图,bucket 1 满了,但他是分裂当前split point指向的bucket 0,分成0和4,并且split point + 1
分裂的时候用的hash函数是下一轮的函数,如图的hash2
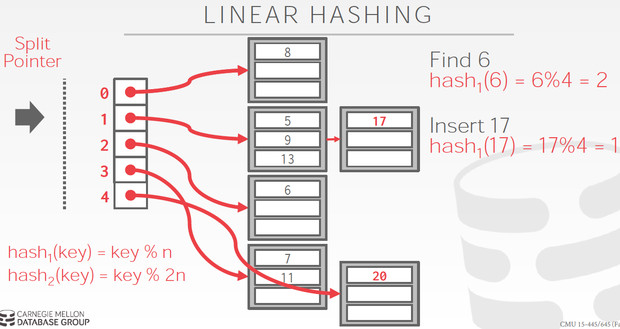
这里每overflow一次,就按顺序分裂一个bucket,当split point为4的时候,即分裂完一轮了,当前bucket=8
把split point重置成0,开始下一轮,每轮的bucket数翻倍,所以hash函数中的取余的数也要翻倍,很容易理解
这样就实现了动态扩展
Tree Indexes
https://www.cnblogs.com/fxjwind/archive/2012/06/09/2543357.html
我们说的B tree,往往说的都是B+ tree;B-tree和B+tree的区别就在于inner node是否存储数据

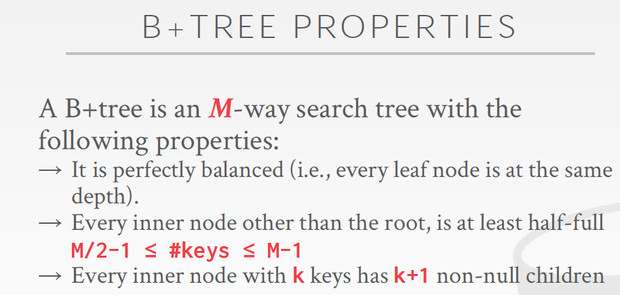
B+树有如下的特性,
m叉而非二叉,可以有效降低树高
每个inner node至少是half-full,这样提高读取效率,读取一个节点,往往是一个page,可以读取尽可能多的数据
inner node,对于k个keys,要有k+1个非null子节点
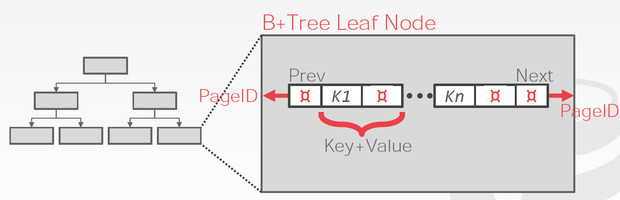
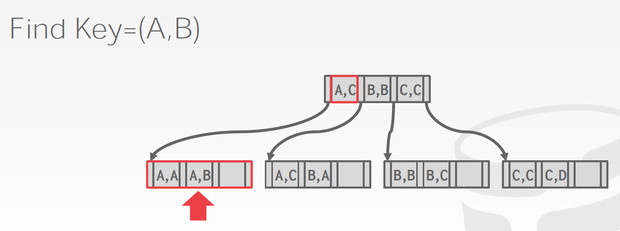
B+数据的结构如下,
分为inner nodes和leaf nodes
inner nodes只有索引,而leaf nodes包含真实数据,而且还有sibling pointers,这是为了更有效的range 查询
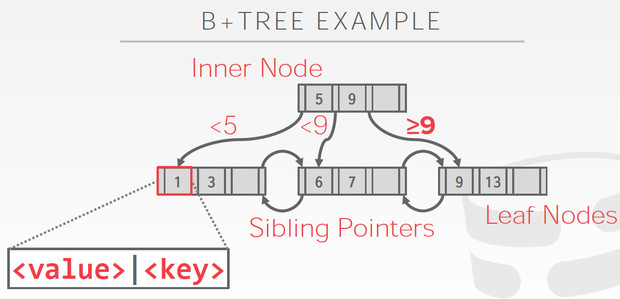
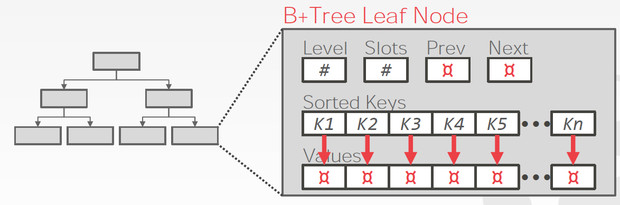
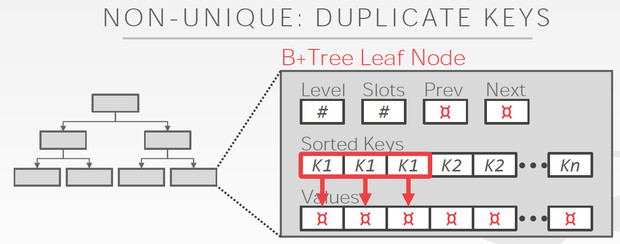
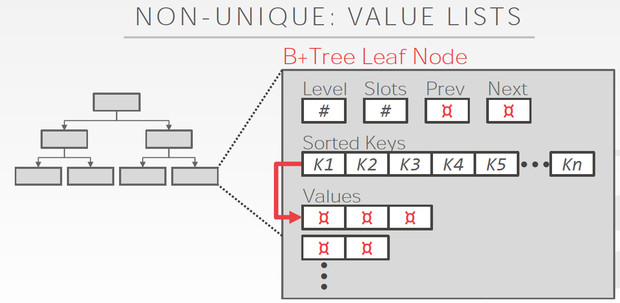
Leaf node的内容也分为两种
Leaf Node的结构如下,
两种kv不同的存储格式,这里pageId,需要理解一下,因为往往B+数的一个节点对应于一个page,所以跳到下一个节点,就是跳到另一个page
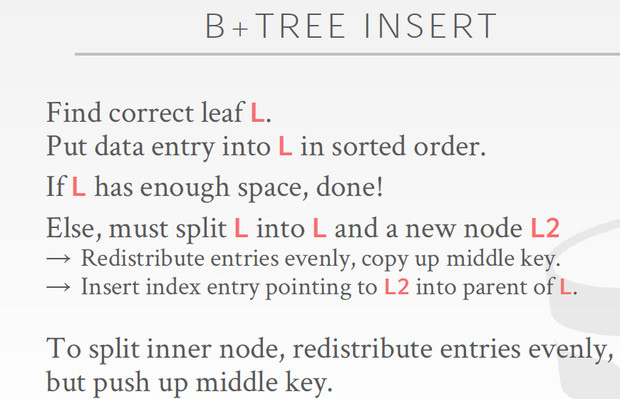
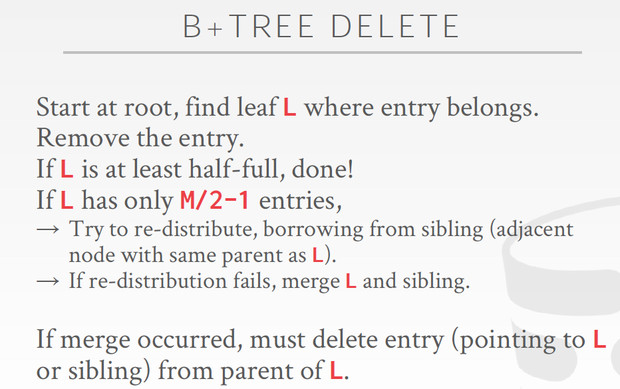
B+树的insert和delete,
Insert,关键就是node满了,需要分裂,分裂完要把middle key放到上一层节点中做索引,如果上一层节点也满了,就需要进一步分裂
delete,关键是如果delete后,节点小于half-full,需要先试图从sibling去借一些达到,half-full,如果sibling也达不到half-full,那么就merge
Clustered Indexes
http://baijiahao.baidu.com/s?id=1598257553176708891&wfr=spider&for=pc
clustered indexes是B+树的应用,
在Innodb里面,每个表都有一个聚簇索引,该索引是根据primary key对行记录生成的B+树索引,如果没有primary key,会生成自增id作为替代;
叶子节点存放的是行数据,称之为数据页,故表中的数据也是聚簇索引中的一部分,数据页之间通过一个双向链表来链接
除了Clustered Indexes以外,都称为Secondary Indexes,与聚簇索引的区别在于辅助索引的叶子节点中存放的是主键的键值
Clustered indexes只有一个,但是辅助索引却可以有多个
可想而知,通过辅助索引只能查到主键id,所以如果你要读到数据,还要再查一次聚簇索引;好处是因为辅助索引不包含数据,所以远小于聚簇索引,查询效率比较高
可以用一列,也可以用多列来创建辅助索引,称为联合索引,
联合索引和普通索引的结构没有不同,只是会在节点中同时记录下多个列的值,遵循最左原则,就是先按第一个列排序,再按第二个列排序。。。。。。
所以查询条件,也需要满足最左原则,否则无法使用索引
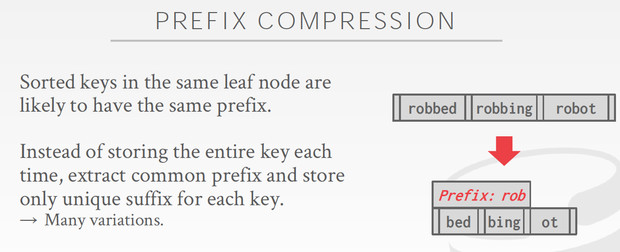
对于变长的keys和重复的keys

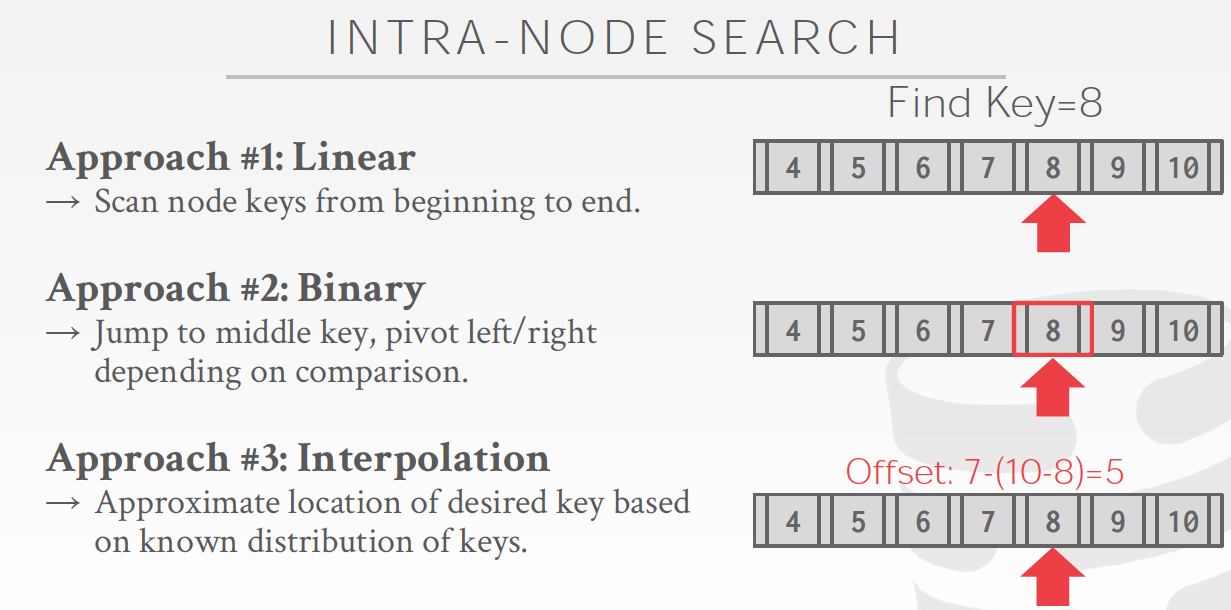
节点内的search方法,
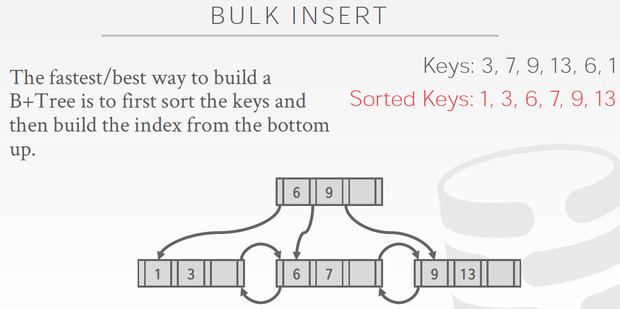
其他B+树还有些优化,

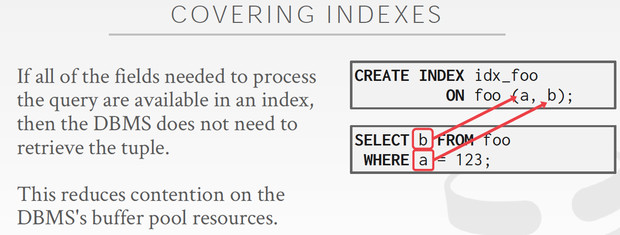
索引覆盖,CoveringIndexes
查询需要的数据,都可以在索引中获取到,不需要读取原始tuple
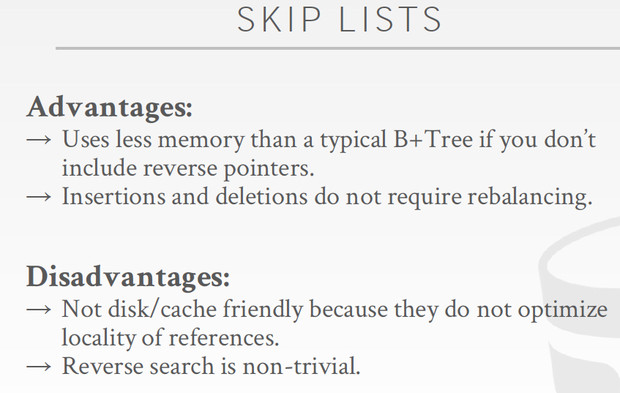
SkipList,跳表
http://www.cnblogs.com/seniusen/p/9870398.html
如果用有序的数组来实现索引,可以简单的用二分查找,但是插入和删除数据会比较麻烦;
最简单的方法实现动态保序的index的方法是用有序链表,但链表的只支持线性搜索,时间复杂度为O(n)
如何让链表也能二分查找,提高查询效率,这就是skiplist
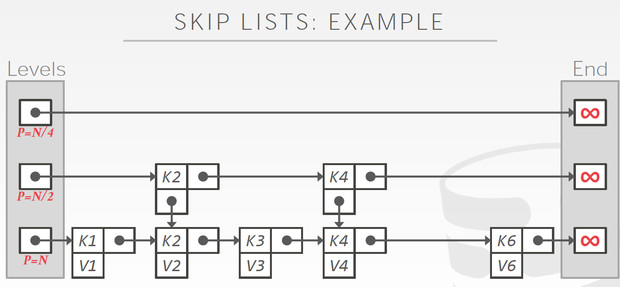
跳表的数据存在第一层,上面的都是索引,想法很简单,避免一个个遍历,越往上层建的索引越稀疏,总之就是为了模拟出二分查找,空间换时间,所以时间复杂度可以近似O(logn)
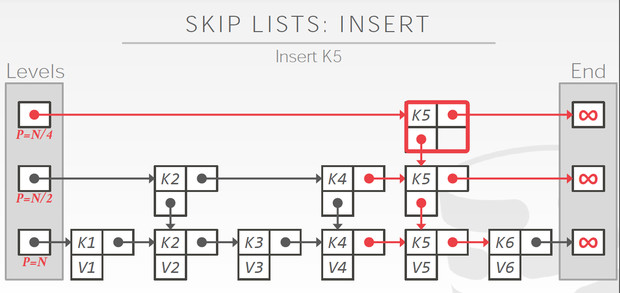
跳表比较有意思的是他的insert过程,
比如插入,k5v5,这里关键是如何建立索引?即要把K5加到哪几层里面
这里的答案是flip coin,就是一个伯努利过程
连续抛硬币,连续出现正面的次数为k,我们就会对前k层建立索引
如果k大于当前最大的level,就需要创建新的level
这有两个好处,
因为是伯努利过程,所以自然约高的level出现概率越低,以1/2降低
并且插入的数据越多,出现较大k的概率越大,因为较大的k是小概率事件
这个设计的还是非常精巧的,和loglogcounting类似的思路
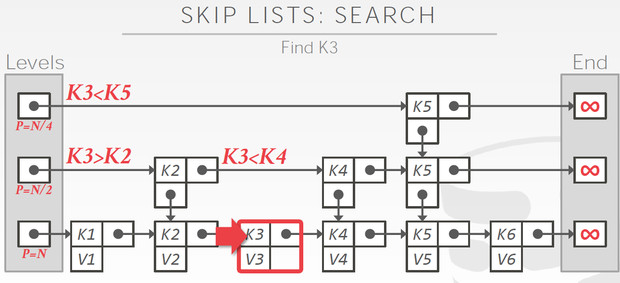
跳表的查询就比较直观了,二分查找下来就ok
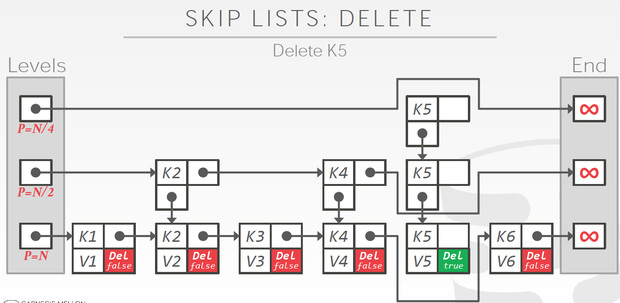
跳表的删除,也不难理解,关键是需要一个标识,先逻辑删除,再物理删除
图中就是刚完成逻辑删除,物理删除就是把这些节点真正删掉
跳表的优缺点
Radix Tree
核心的思路,前缀树,节点的path就代表key,可以reconstructed
树高,取决于key的length,而不是key的多少;其实key多了,表示key的length肯定要变长,一样的
不需要rebalance
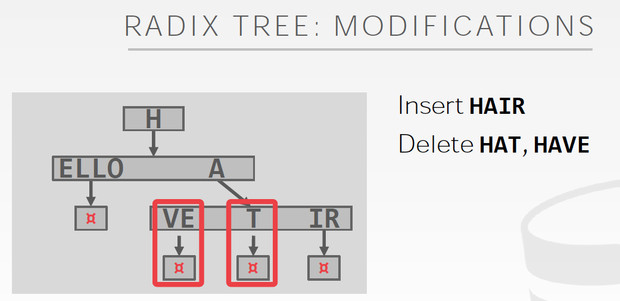
Radix Tree的例子,看出和Trie的区别
Radix只有共享的才需要单独的节点

Radix的优点,就是插入和删除特别简单
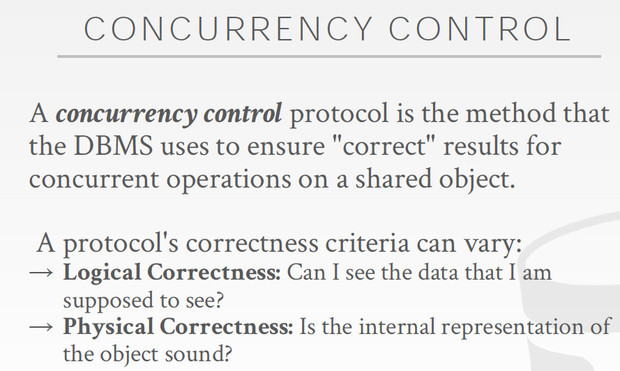
Index Concurrency Control
讨论多线程并发访问索引
其中Logical correctness是指应用层的,transaction
而这里主要讨论的是Physical correctness,内部数据结构的并发访问
这里再解释在数据库领域,lock和latch的区别
既然讨论的是内部数据结构的并发控制,那用的就是latch
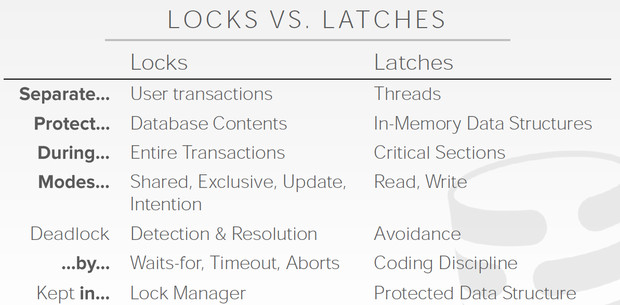
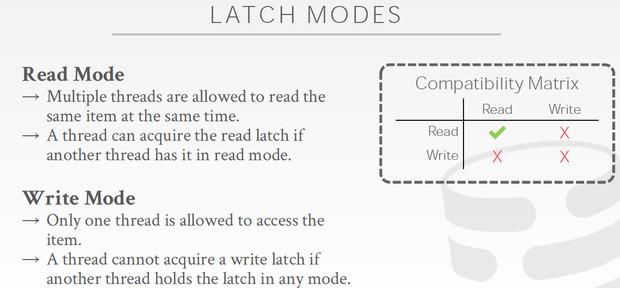
Latch分为两种类型,读和写
从表中可以看出来,我们要解决写写,和读写冲突,读读是没有冲突的
对于数据库中主要的索引结构,B+tree
解决冲突的方式称为,Latch Crabbing/Coupling

这个其实很容易理解,
读比较简单,从root开始,只要能获取到child的latch,就可以释放parent
更新复杂些,因为我更新当前节点,可能会导致split和merge,这样父节点也需要更新
所以要同时获取父子两层的latch,只有当不会发生split和merge,所以没有必要改动父节点,safe,才释放父节点的latch

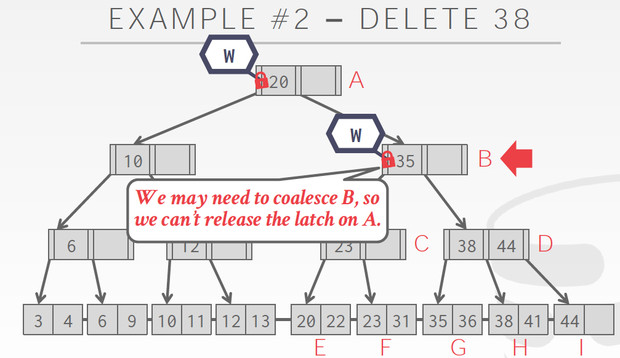
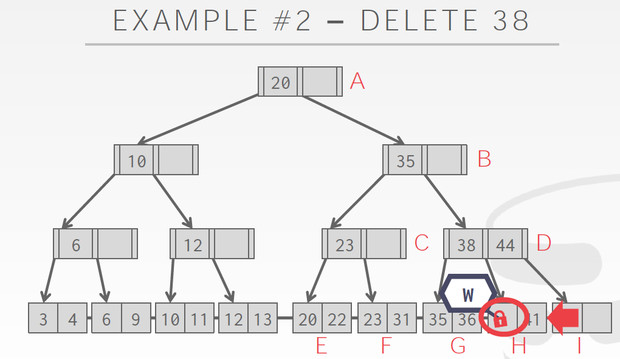
Delete的例子,对于delete我们要考虑的是否要merge
所以在B的时候,我们不能释放A的Latch,因为B只有一个35,可能在delete的过程中需要merge
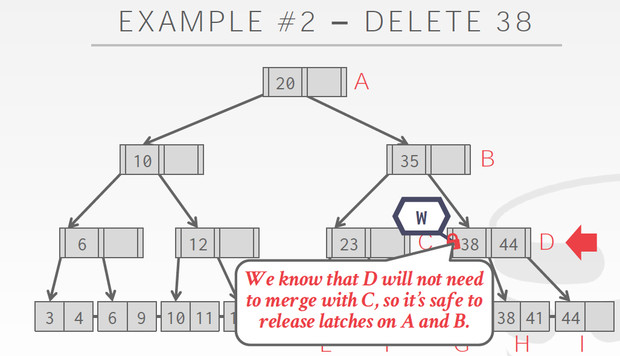
而到了C,C有38,44,删除一个也不会导致merge,所以可以释放A,B的latch
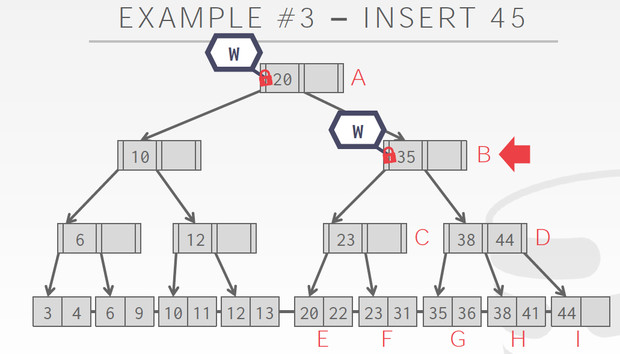
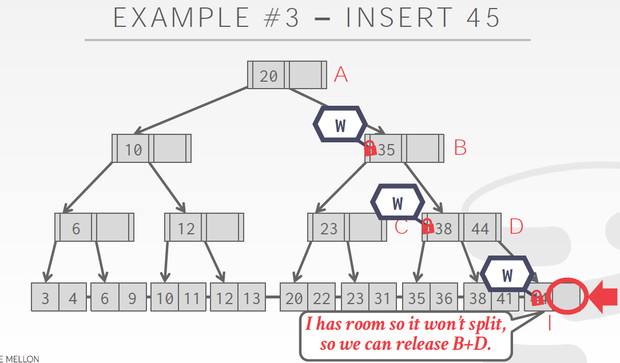
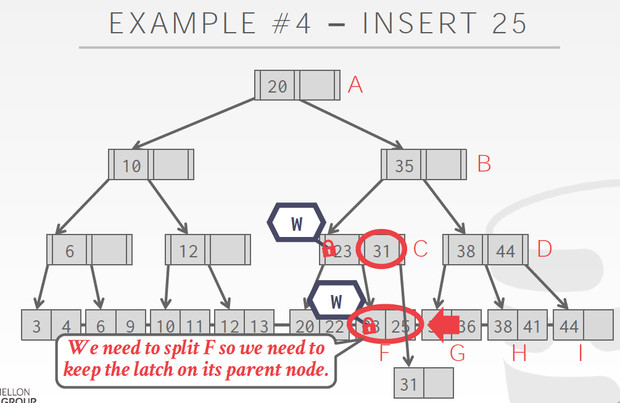
同样对于Insert,我们要考虑的是split
B的时候,有一个空,没有split的风险,释放A
但到D的时候,有split的风险,不能释放B,到I发现有空,不需要split,释放B,D
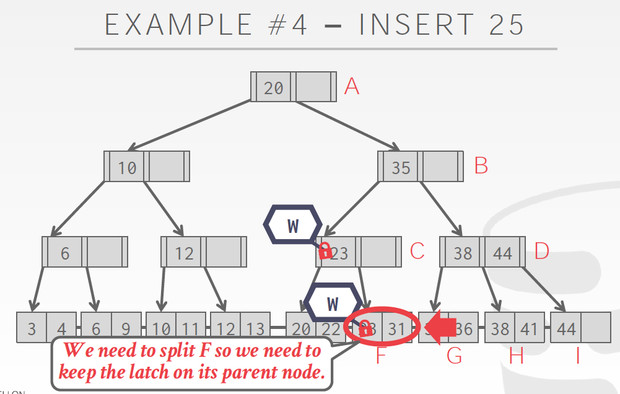
这个Case到F的时候,发现要split,所以不能释放C的latch,C也要增加节点
这个方法有个显著的问题,
Root会成为明显的瓶颈,以为所有锁都要从root开始锁起
优化的思路,
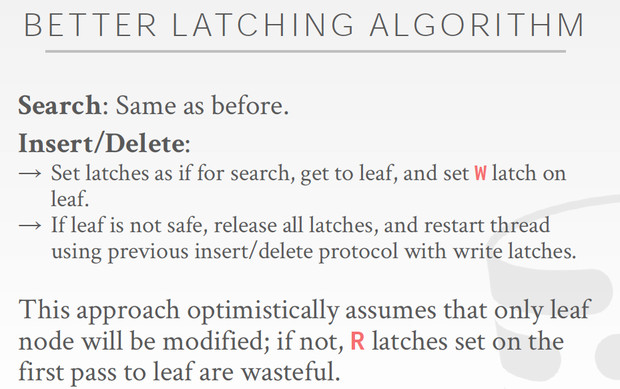
这有个假设,就是大部分更新是不需要,split和merge的,否则效率反而更低了
如果不需要split和merge,就没有必要给parent加写latch,用读latch就可以;用读latch,首先避免每次都在root写写冲突,因为读读是不冲突的,而且又保证了读写冲突,因为别人在更新的同时,你需要等待的
Leaf Node Scan
前面说的latch的方式都是Top-down的,所以不会产生死锁,大家加锁的方向一致的,不会形成环
但是B+tree在leaf node之间也是有pointer的,这就会形成环
读的场景,不冲突

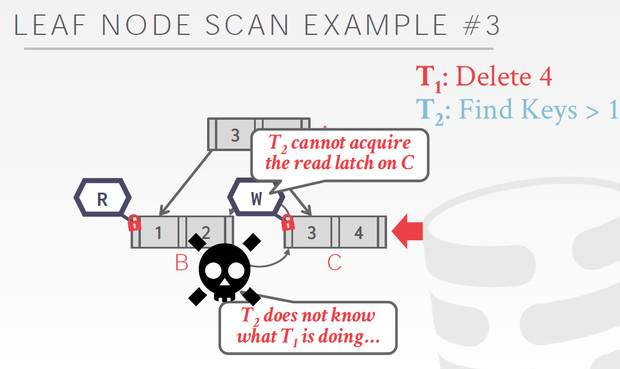
写的场景,就会产生冲突
T2,冲突的时候,有两个选择,一个是等,一个是自杀(防止死锁)
因为T2不知道T1在干啥,所以合理的方式是,等一个timeout,然后自杀,这样可以有效避免死锁
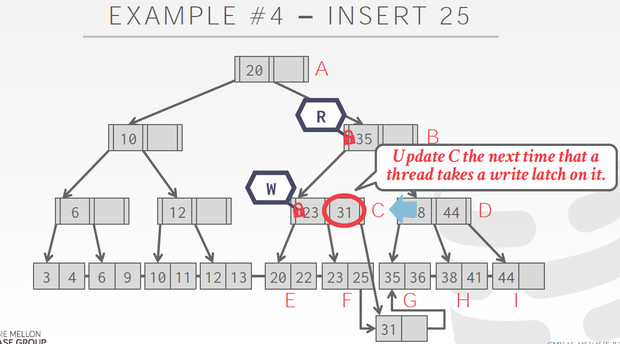
Delayed parent updates
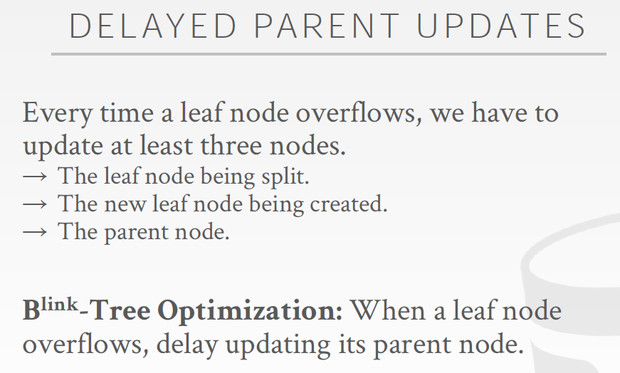
延迟对于parent的变更,这样会更有效
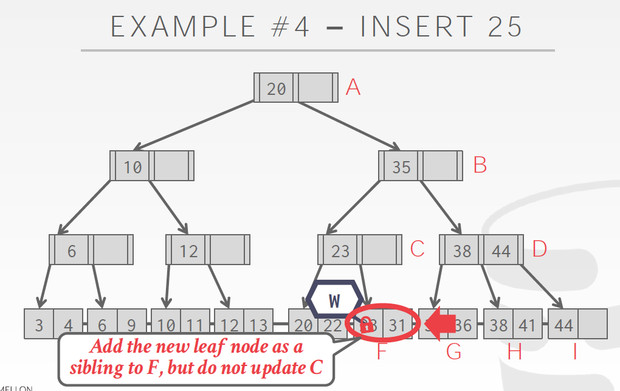

后续会有线程单独的来更新parent
对于parent的更新可以批量,并且降低写latch的冲突的概率

 浙公网安备 33010602011771号
浙公网安备 33010602011771号