

1 引入IIO 子系统
随着手机、物联网、工业物联网和可穿戴设备的爆发,传感器的需求越来越多。比如手机或者手环里面的加速度计、光传感器、陀螺仪、气压计、磁力计等,这些传感器本质上都是 ADC。这些传感器对外通过 IIC 或者 SPI 接口来发送ADC转换后的原始数据。
Linux 内核为了管理这些日益增多的 ADC 类传感器,特地推出了 IIO 子系统。
IIO 全称是 Industrial I/O,翻译过来就是工业 I/O,常用的陀螺仪、加速度计、电压/电流测量芯片、光照传感器、压力传感器等内部都是有个 ADC,内部 ADC 将原始的 模拟数据转换为数字量,然后通过其他的通信接口,比如 IIC、SPI 等传输给 SOC。
因此,当使用的传感器本质是 ADC器件的时候,可以优先考虑使用 IIO 驱动框架。
2 IIO 子系统驱动框架
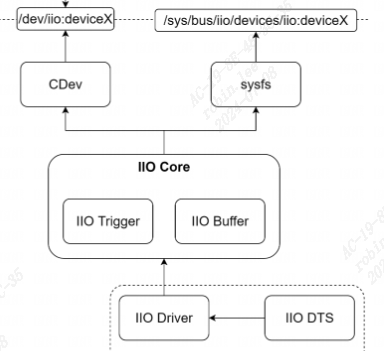
- IIO sysfs对用户空间提供IIO设备访问和配置。
- IIO Core提供IIO设备、
IIO Trigger、IIO Buffer分配、初始化、注册等工作。industrialio-core.cindustrialio-buffer.cindustrialio-event.c
- IIO Driver不同IIO设备的驱动程序。
3 数据结构
3.1 iio_dev-iio设备
struct iio_dev {
int id;
struct module *driver_module;
int modes;//设备支持的模式
int currentmode;//表示设备当前模式
struct device dev;
struct iio_event_interface *event_interface;
struct iio_buffer *buffer;//缓冲区
struct list_head buffer_list;//当前匹配的缓冲区列表
int scan_bytes; //捕获到,并且提供给缓冲区的字节数
struct mutex mlock;
const unsigned long *available_scan_masks;//扫描位掩码,使用触发缓冲区的时候可以通过
//设置掩码来确定使能哪些通道,使能以后的通道会将捕获到的数据发送到 IIO 缓冲区
unsigned masklength;
const unsigned long *active_scan_mask;//缓冲区已经开启的通道掩码
bool scan_timestamp;
unsigned scan_index_timestamp;//扫描时间戳,如果使能以后会将捕获时间戳放到缓冲区里面
struct iio_trigger *trig;// IIO 设备当前触发器
bool trig_readonly;
struct iio_poll_func *pollfunc;
struct iio_poll_func *pollfunc_event;
struct iio_chan_spec const *channels;//IIO设备通道列表
int num_channels;//IIO设备通道数
struct list_head channel_attr_list;
struct attribute_group chan_attr_group;
const char *name;
const struct iio_info *info;
clockid_t clock_id;
struct mutex info_exist_lock;
const struct iio_buffer_setup_ops *setup_ops;
struct cdev chrdev;
};//iio_dev用于描述一个具体IIO设备, include/linux/iio/iio.h
/* Device operating modes */
#define INDIO_DIRECT_MODE 0x01
#define INDIO_BUFFER_TRIGGERED 0x02
#define INDIO_BUFFER_SOFTWARE 0x04
#define INDIO_BUFFER_HARDWARE 0x08
#define INDIO_ALL_BUFFER_MODES \
(INDIO_BUFFER_TRIGGERED | INDIO_BUFFER_HARDWARE | INDIO_BUFFER_SOFTWARE)
| 模式 | 描述 |
|---|---|
| INDIO_DIRECT_MODE | 提供 sysfs 接口 |
| INDIO_BUFFER_TRIGGERED | 支持硬件缓冲触发 |
| INDIO_BUFFER_SOFTWARE | 支持软件缓冲触发 |
| INDIO_BUFFER_HARDWARE | 支持硬件缓冲区 |
3.1.1 iio_buffer_setup_ops
struct iio_buffer_setup_ops {
int (*preenable)(struct iio_dev *); /* 缓冲区使能之前调用 */
int (*postenable)(struct iio_dev *); /* 缓冲区使能之后调用 */
int (*predisable)(struct iio_dev *); /* 缓冲区禁用之前调用 */
int (*postdisable)(struct iio_dev *); /* 缓冲区禁用之后调用 */
bool (*validate_scan_mask)(struct iio_dev *indio_dev, const unsigned long *scan_mask); /* 检查扫描掩码是否有效 */
};
在使能或禁用缓冲区的时候会调用这些函数。
3.2 iio_info-属性和函数实现
iio_info包含每个iio设备的属性和具体实现函数。
struct iio_info {
struct module *driver_module;
struct attribute_group *event_attrs;
const struct attribute_group *attrs;
int (*read_raw)(struct iio_dev *indio_dev,
struct iio_chan_spec const *chan,
int *val,
int *val2,
long mask);//最终读写传感器设备内部数据的操作函数
int (*read_raw_multi)(struct iio_dev *indio_dev,
struct iio_chan_spec const *chan,
int max_len,
int *vals,
int *val_len,
long mask);
int (*write_raw)(struct iio_dev *indio_dev,
struct iio_chan_spec const *chan,
int val,
int val2,
long mask);
int (*write_raw_get_fmt)(struct iio_dev *indio_dev,
struct iio_chan_spec const *chan,
long mask);
int (*read_event_config)(struct iio_dev *indio_dev,
const struct iio_chan_spec *chan,
enum iio_event_type type,
enum iio_event_direction dir);
int (*write_event_config)(struct iio_dev *indio_dev,
const struct iio_chan_spec *chan,
enum iio_event_type type,
enum iio_event_direction dir,
int state);
int (*read_event_value)(struct iio_dev *indio_dev,
const struct iio_chan_spec *chan,
enum iio_event_type type,
enum iio_event_direction dir,
enum iio_event_info info, int *val, int *val2);
int (*write_event_value)(struct iio_dev *indio_dev,
const struct iio_chan_spec *chan,
enum iio_event_type type,
enum iio_event_direction dir,
enum iio_event_info info, int val, int val2);
int (*validate_trigger)(struct iio_dev *indio_dev,
struct iio_trigger *trig);
int (*update_scan_mode)(struct iio_dev *indio_dev,
const unsigned long *scan_mask);
int (*debugfs_reg_access)(struct iio_dev *indio_dev,
unsigned reg, unsigned writeval,
unsigned *readval);
int (*of_xlate)(struct iio_dev *indio_dev,
const struct of_phandle_args *iiospec);
int (*hwfifo_set_watermark)(struct iio_dev *indio_dev, unsigned val);
int (*hwfifo_flush_to_buffer)(struct iio_dev *indio_dev,
unsigned count);
};
indio_dev:需要读写的 IIO 设备。
chan:需要读取的通道。
val,val2:对于 read_raw 来说 val 和 val2 这两个就是应用程序从内核空间读取到数据,一般就是传感器指定通道值,或者传感器的量程、分辨率等。对于 write_raw 来说就是应用程序向设备写入的数据。val 和 val2 共同组成具体值,val 是整数部分,val2 是小数部分。Linux内核无法支持浮点运算,因此val2是放大后的值。扩大的倍数我们不能随便设置,而是要使用 Linux 定义的倍数,Linux 内核里面定义的数据扩大倍数:
| 组合宏 | 描述 |
|---|---|
IIO_VAL_INT |
整数值,没有小数。比如 5000,那么就是 val=5000,不 需要设置 val2 |
IIO_VAL_INT_PLUS_MICRO |
小数部分扩大 1000000 倍,比如 1.00236,此时 val=1, val2=2360 |
IIO_VAL_INT_PLUS_NANO |
小数部分扩大 1000000000 倍,同样是 1.00236,此时 val=1,val2=2360000 |
IIO_VAL_INT_PLUS_MICRO_DB |
dB 数据,和IIO_VAL_INT_PLUS_MICRO数据形式一 样,只是在后面添加 db |
IIO_VAL_INT_MULTIPLE |
多个整数值,比如一次要传回 6 个整数值,那么 val 和 val2就不够用了。此宏主要用于iio_info的read_raw_multi 函数 |
IIO_VAL_FRACTIONAL |
分数值,也就是 val/val2。比如 val=1,val2=4,那么实际 值就是 1/4 |
IIO_VAL_FRACTIONAL_LOG2 |
值为 val>>val2,也就是 val 右移 val2 位。比如 val=25600, val2=4 , 那 么 真 正 的 值 就 是 25600 右 移 4 位 , 25600>>4=1600 |
mask:掩码,用于指定我们读取的是什么数据,比如 ICM20608 这样的传感器,他既有原 始的测量数据,比如 X,Y,Z 轴的陀螺仪、加速度计等,也有测量范围值,或者分辨率。比如加 速度计测量范围设置为±16g,那么分辨率就是 32/65536≈0.000488,我们只有读出原始值以及 对应的分辨率(量程),才能计算出真实的重力加速度。此时就有两种数据值:传感器原始值、分辨率。Linux 内核使用 IIO_CHAN_INFO_RAW 和 IIO_CHAN_INFO_SCALE 这两个宏来表示原 始值以及分辨率,这两个宏就是掩码。
write_raw_get_fmt 用于设置用户空间向内核空间写入的数据格式,write_raw_get_fmt函数决定了 wtite_raw 函数中 val 和 val2 的意义,也就是表中的组合 形式。比如我们需要在应用程序中设置 ICM20608 加速度计的量程为±8g,那么分辨率就是16/65536≈0.000244,我们在 write_raw_get_fmt 函数里面设置加速度计的数据格式为 IIO_VAL_INT_PLUS_MICRO。那么我们在应用程序里面向指定的文件写入 0.000244 以后,最 终传递给内核驱动的就是 0.000244*1000000=244。也就是 write_raw 函数的 val 参数为 0,val2 参数为 244。
3.3 iio_chan_spec-通道属性
一个IIO设备可能有多个通道,每个通道由struct iio_chan_spec表示。比如一个 ADC 芯片支持 8 路采集,那 么这个 ADC 就有 8 个通道。的 ICM20608六轴传感器,可以输出三轴陀螺仪(X、Y、Z)、三轴加速度计(X、Y、Z)和一路温度,共7路数据。
struct iio_chan_spec {
enum iio_chan_type type;//表示channel类型,电压、电流、加速度、电磁等等。
int channel;
int channel2;
unsigned long address;//该通道对应的芯片数据寄存器地址
int scan_index;//当使用触发缓冲区的时候,scan_index 是扫描索引
struct {
char sign;
u8 realbits;
u8 storagebits;
u8 shift;
u8 repeat;
enum iio_endian endianness;
} scan_type;//扫描数据的存储格式
long info_mask_separate;
long info_mask_separate_available;
long info_mask_shared_by_type;//标记导出的信息由相同类型的通道共享,比如
long info_mask_shared_by_type_available;
long info_mask_shared_by_dir;
long info_mask_shared_by_dir_available;
long info_mask_shared_by_all;
long info_mask_shared_by_all_available;
const struct iio_event_spec *event_spec;
unsigned int num_event_specs;
const struct iio_chan_spec_ext_info *ext_info;
const char *extend_name;
const char *datasheet_name;
unsigned modified:1;//modified 为 1 的时候,channel2 为通道修饰符
unsigned indexed:1;// indexed 为 1时候,channel 为通道索引
unsigned output:1;
unsigned differential:1;
};
enum iio_chan_type {
IIO_VOLTAGE, /* 电压类型 */
IIO_CURRENT, /* 电流类型 */
IIO_POWER, /* 功率类型 */
IIO_ACCEL, /* 加速度类型 */
IIO_ANGL_VEL, /* 角度类型(陀螺仪) */
IIO_MAGN, /* 电磁类型(磁力计) */
IIO_LIGHT, /* 灯光类型 */
IIO_INTENSITY, /* 强度类型(光强传感器) */
IIO_PROXIMITY, /* 接近类型(接近传感器) */
IIO_TEMP, /* 温度类型 */
IIO_INCLI, /* 倾角类型(倾角测量传感器) */
IIO_ROT, /* 旋转角度类型 */
IIO_ANGL, /* 转动角度类型(电机旋转角度测量传感器) */
IIO_TIMESTAMP, /* 时间戳类型 */
IIO_CAPACITANCE, /* 电容类型 */
IIO_ALTVOLTAGE, /* 频率类型 */
IIO_CCT, /* 笔者暂时未知的类型 */
IIO_PRESSURE, /* 压力类型 */
IIO_HUMIDITYRELATIVE, /* 湿度类型 */
IIO_ACTIVITY, /* 活动类型(计步传感器) */
IIO_STEPS, /* 步数类型 */
IIO_ENERGY, /* 能量类型(卡路里) */
IIO_DISTANCE, /* 距离类型 */
IIO_VELOCITY, /* 速度类型 */
};
如果是 ICM20608 这样的多轴传感器,那么就是复合类型了,陀螺仪部分是 IIO_ANGL_VEL 类型,加速度计部分是IIO_ACCEL,温度部分就是 IIO_TEMP。
当成员变量 modified 为 1 的时候,channel2 为通道修饰符。Linux 内核给出了 可用的通道修饰符:
enum iio_modifier {
IIO_NO_MOD,
IIO_MOD_X, /* X 轴 */
IIO_MOD_Y, /* Y 轴 */
IIO_MOD_Z, /* Z 轴 */
......
};
比如 ICM20608 的加速度计部分,类型设置为 IIO_ACCEL,X、Y、Z 这三个轴就用 channel2 的通道修饰符来区分.
scan_type 各个成员变量:
scan_type.sign:如果为‘u’表示数据为无符号类型,为‘s’的话为有符号类型。
scan_type.realbits:数据真实的有效位数,比如很多传感器说的 10 位 ADC,其真实有效数
据就是 10 位。
scan_type.storagebits:存储位数,有效位数+填充位。比如有些传感器 ADC 是 12 位的,
那么我们存储的话肯定要用到 2 个字节,也就是 16 位,这 16 位就是存储位数。
scan_type.shift:右移位数,也就是存储位数和有效位数不一致的时候,需要右移的位数,这
个参数不总是需要,一切以实际芯片的数据手册位数。
scan_type.repeat:实际或存储位的重复数量。
scan_type.endianness:数据的大小端模式,可设置为 IIO_CPU、IIO_BE(大端)或 IIO_LE(小
端)。
info_mask_separate 将属性标记为特定于此通
info_mask_shared_by_type 标记导出的信息由相同类型的通道共享。X、Y、Z 轴他们的 type 都 是 IIO_ACCEL,也就是类型相同。而这三个轴的分辨率(量程)是一样的,那么这3个通道info_mask_shared_by_type 中使能IO_CHAN_INFO_SCALE 这个属性,表示 这三个通道的分辨率是共用的,这样在sysfs下就会只生成一个描述分辨率的文件,这三个通道 都可以使用这一个分辨率文件。
info_mask_shared_by_dir 标记某些导出的信息由相同方向的通道共享。
info_mask_shared_by_all 表设计某些信息所有的通道共享,无论这些通道的类 型、方向如何,全部共享。
output 表示为输出通道。
differential 表示为差分通道。
3.4 iio_trigger-触发数据采集
触发器是基于某种信号来触发数据采集,比如:数据就绪中断;周期性中断;用户空间sysfs读写。
struct iio_trigger {
const struct iio_trigger_ops *ops;
struct module *owner;
int id;
const char *name;
struct device dev;
struct list_head list;
struct list_head alloc_list;
atomic_t use_count;
struct irq_chip subirq_chip;
int subirq_base;
struct iio_subirq subirqs[CONFIG_IIO_CONSUMERS_PER_TRIGGER];
unsigned long pool[BITS_TO_LONGS(CONFIG_IIO_CONSUMERS_PER_TRIGGER)];
struct mutex pool_lock;
bool attached_own_device;
};
3.4.1 iio_trigger_ops
struct iio_trigger_ops {
int (*set_trigger_state)(struct iio_trigger *trig, bool state);--设置触发器状态,打开或关闭。
int (*try_reenable)(struct iio_trigger *trig);--当用户计数为0时,重新使能接口。
int (*validate_device)(struct iio_trigger *trig,
struct iio_dev *indio_dev);
};
3.5 iio_buffer-保存采集到的数据
struct iio_buffer {
int length;
int bytes_per_datum;
struct attribute_group *scan_el_attrs;
long *scan_mask;
bool scan_timestamp;
const struct iio_buffer_access_funcs *access;
struct list_head scan_el_dev_attr_list;
struct attribute_group buffer_group;
struct attribute_group scan_el_group;
wait_queue_head_t pollq;
bool stufftoread;
const struct attribute **attrs;
struct list_head demux_list;
void *demux_bounce;
struct list_head buffer_list;
struct kref ref;
unsigned int watermark;
};
4 API
4.1 iio_dev 注册与注销
struct iio_dev *iio_device_alloc(int sizeof_priv)//申请 iio_dev
struct iio_dev *devm_iio_device_alloc(struct device *dev, int sizeof_priv)//申请 iio_dev
void iio_device_free(struct iio_dev *indio_dev);
void devm_iio_device_free(struct device *dev, struct iio_dev *indio_dev);
int iio_device_register(struct iio_dev *indio_dev)//注册iio设备
void iio_device_unregister(struct iio_dev *indio_dev)//注销iio设备
#define iio_device_register(indio_dev) \
__iio_device_register((indio_dev), THIS_MODULE)
int __iio_device_register(struct iio_dev *indio_dev, struct module *this_mod);
void iio_device_unregister(struct iio_dev *indio_dev);
#define devm_iio_device_register(dev, indio_dev) \
__devm_iio_device_register((dev), (indio_dev), THIS_MODULE);
int __devm_iio_device_register(struct device *dev, struct iio_dev *indio_dev,
struct module *this_mod);
void devm_iio_device_unregister(struct device *dev, struct iio_dev *indio_dev);
devm_iio_device_register/iio_device_register
->__iio_device_register
->iio_check_unique_scan_index
->iio_device_register_debugfs
->debugfs_create_file//创建direct_reg_access调试节点,通过此节点可以直接读写寄存器。iio_debugfs_reg_fops调用IIO设备struct iio_dev->info->debugfs_reg_access()函数。
4.1.1 iio_device_register_sysfs过程
devm_iio_device_register过程中会调用iio_device_register_sysfs:
->iio_buffer_alloc_sysfs_and_mask
->iio_device_register_sysfs//创建adc属性和每个channel属性。
->cdev_init//初始化cdev设备,操作函数集为iio_buffer_fileops。
->cdev_device_add//创建cdev设备/dev/iio:deviceX。
展开iio_device_register_sysfs如下:
iio_device_register_sysfs
---> iio_device_add_channel_sysfs
---> iio_device_add_info_mask_type
---> __iio_add_chan_devattr
---> __iio_device_attr_init
其中在iio_device_add_info_mask_type中设置了读写回调函数,比如cat in_voltage0_input就会调用回调函数iio_read_channel_info.
int __iio_device_attr_init()
{...
case IIO_SEPARATE:
if (chan->indexed)
name = kasprintf(GFP_KERNEL, "%s_%s%d_%s",
iio_direction[chan->output],
iio_chan_type_name_spec[chan->type],
chan->channel,
full_postfix);
//in_voltage0_input
//
..........
}
格式为%s_%s%d_%s", 对应了in_voltage0_input,其中iio_direction、iio_chan_type_name_spec、iio_chan_info_postfix对应的值为 "in" 、"voltage" 、"input"
如下代码片段:
static const char * const iio_direction[] = {
[0] = "in",
[1] = "out",
};
static const char * const iio_chan_type_name_spec[] = {
[IIO_VOLTAGE] = "voltage",
[IIO_CURRENT] = "current",
[IIO_POWER] = "power",
[IIO_ACCEL] = "accel",
// 以下省略
};
/* relies on pairs of these shared then separate */
static const char * const iio_chan_info_postfix[] = {
[IIO_CHAN_INFO_RAW] = "raw",
[IIO_CHAN_INFO_PROCESSED] = "input",
[IIO_CHAN_INFO_SCALE] = "scale",
[IIO_CHAN_INFO_OFFSET] = "offset",
// 以下省略
};
4.2 iio_init-子系统的初始化
IIO子系统初始化包括:
- iio总线注册
- 分配IIO字符设备号
- 创建IIO设备
debugfs
iio_init
->bus_register//注册iio bus。
->alloc_chrdev_region//创建iio cdev设备编号iio_devt。
->debugfs_create_dir//创建/sys/kernel/debug/iio调试目录iio_debugfs_dentry。
5 iio实验-操作ICM20608
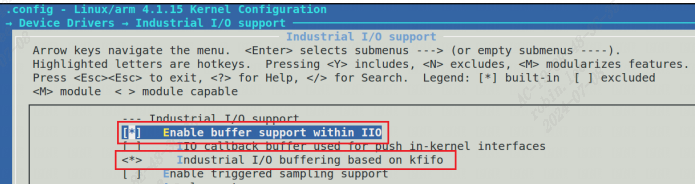
5.1 使能内核 IIO
-> Device Drivers
-> Industrial I/O support (IIO [=y])
-> [*]Enable buffer support within IIO //选中
-> <*>Industrial I/O buffering based on kfifo //选中
5.2 驱动代码分析
5.2.0 源码
#include <linux/spi/spi.h>
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/init.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/errno.h>
#include <linux/platform_device.h>
#include "icm20608reg.h"
#include <linux/gpio.h>
#include <linux/device.h>
#include <asm/uaccess.h>
#include <linux/cdev.h>
#include <linux/regmap.h>
#include <linux/iio/iio.h>
#include <linux/iio/sysfs.h>
#include <linux/iio/buffer.h>
#include <linux/iio/trigger.h>
#include <linux/iio/triggered_buffer.h>
#include <linux/iio/trigger_consumer.h>
#include <linux/unaligned/be_byteshift.h>
#define ICM20608_NAME "icm20608"
#define ICM20608_TEMP_OFFSET 0
#define ICM20608_TEMP_SCALE 326800000
#define ICM20608_CHAN(_type, _channel2, _index) \
{ \
.type = _type, \
.modified = 1, \
.channel2 = _channel2, \
.info_mask_shared_by_type = BIT(IIO_CHAN_INFO_SCALE), \
.info_mask_separate = BIT(IIO_CHAN_INFO_RAW) | \
BIT(IIO_CHAN_INFO_CALIBBIAS), \
.scan_index = _index, \
.scan_type = { \
.sign = 's', \
.realbits = 16, \
.storagebits = 16, \
.shift = 0, \
.endianness = IIO_BE, \
}, \
}
/*
* ICM20608的扫描元素,3轴加速度计、
* 3轴陀螺仪、1路温度传感器,1路时间戳
*/
enum inv_icm20608_scan {
INV_ICM20608_SCAN_ACCL_X,
INV_ICM20608_SCAN_ACCL_Y,
INV_ICM20608_SCAN_ACCL_Z,
INV_ICM20608_SCAN_TEMP,
INV_ICM20608_SCAN_GYRO_X,
INV_ICM20608_SCAN_GYRO_Y,
INV_ICM20608_SCAN_GYRO_Z,
INV_ICM20608_SCAN_TIMESTAMP,
};
struct icm20608_dev {
struct spi_device *spi; /* spi设备 */
struct regmap *regmap; /* regmap */
struct regmap_config regmap_config;
struct mutex lock;
};
/*
* icm20608陀螺仪分辨率,对应250、500、1000、2000,计算方法:
* 以正负250度量程为例,500/2^16=0.007629,扩大1000000倍,就是7629
*/
static const int gyro_scale_icm20608[] = {7629, 15258, 30517, 61035};
/*
* icm20608加速度计分辨率,对应2、4、8、16 计算方法:
* 以正负2g量程为例,4/2^16=0.000061035,扩大1000000000倍,就是61035
*/
static const int accel_scale_icm20608[] = {61035, 122070, 244140, 488281};
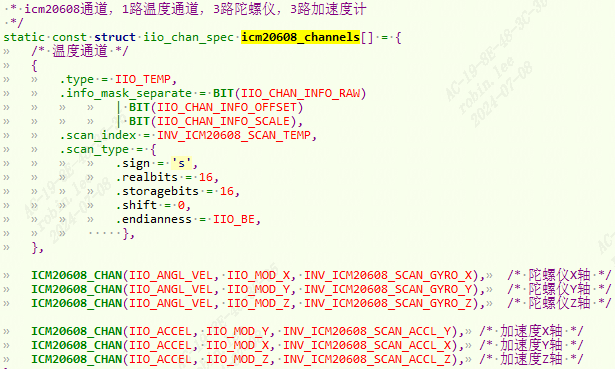
/*
* icm20608通道,1路温度通道,3路陀螺仪,3路加速度计
*/
static const struct iio_chan_spec icm20608_channels[] = {
/* 温度通道 */
{
.type = IIO_TEMP,
.info_mask_separate = BIT(IIO_CHAN_INFO_RAW)
| BIT(IIO_CHAN_INFO_OFFSET)
| BIT(IIO_CHAN_INFO_SCALE),
.scan_index = INV_ICM20608_SCAN_TEMP,
.scan_type = {
.sign = 's',
.realbits = 16,
.storagebits = 16,
.shift = 0,
.endianness = IIO_BE,
},
},
ICM20608_CHAN(IIO_ANGL_VEL, IIO_MOD_X, INV_ICM20608_SCAN_GYRO_X), /* 陀螺仪X轴 */
ICM20608_CHAN(IIO_ANGL_VEL, IIO_MOD_Y, INV_ICM20608_SCAN_GYRO_Y), /* 陀螺仪Y轴 */
ICM20608_CHAN(IIO_ANGL_VEL, IIO_MOD_Z, INV_ICM20608_SCAN_GYRO_Z), /* 陀螺仪Z轴 */
ICM20608_CHAN(IIO_ACCEL, IIO_MOD_Y, INV_ICM20608_SCAN_ACCL_Y), /* 加速度X轴 */
ICM20608_CHAN(IIO_ACCEL, IIO_MOD_X, INV_ICM20608_SCAN_ACCL_X), /* 加速度Y轴 */
ICM20608_CHAN(IIO_ACCEL, IIO_MOD_Z, INV_ICM20608_SCAN_ACCL_Z), /* 加速度Z轴 */
};
static unsigned char icm20608_read_onereg(struct icm20608_dev *dev, u8 reg)
{
u8 ret;
unsigned int data;
ret = regmap_read(dev->regmap, reg, &data);
return (u8)data;
}
static void icm20608_write_onereg(struct icm20608_dev *dev, u8 reg, u8 value)
{
regmap_write(dev->regmap, reg, value);
}
void icm20608_reginit(struct icm20608_dev *dev)
{
u8 value = 0;
icm20608_write_onereg(dev, ICM20_PWR_MGMT_1, 0x80);
mdelay(50);
icm20608_write_onereg(dev, ICM20_PWR_MGMT_1, 0x01);
mdelay(50);
value = icm20608_read_onereg(dev, ICM20_WHO_AM_I);
printk("ICM20608 ID = %#X\r\n", value);
icm20608_write_onereg(dev, ICM20_SMPLRT_DIV, 0x00); /* 输出速率是内部采样率 */
icm20608_write_onereg(dev, ICM20_GYRO_CONFIG, 0x18); /* 陀螺仪±2000dps量程 */
icm20608_write_onereg(dev, ICM20_ACCEL_CONFIG, 0x18); /* 加速度计±16G量程 */
icm20608_write_onereg(dev, ICM20_CONFIG, 0x04); /* 陀螺仪低通滤波BW=20Hz */
icm20608_write_onereg(dev, ICM20_ACCEL_CONFIG2, 0x04); /* 加速度计低通滤波BW=21.2Hz */
icm20608_write_onereg(dev, ICM20_PWR_MGMT_2, 0x00); /* 打开加速度计和陀螺仪所有轴 */
icm20608_write_onereg(dev, ICM20_LP_MODE_CFG, 0x00); /* 关闭低功耗 */
icm20608_write_onereg(dev, ICM20_INT_ENABLE, 0x01); /* 使能FIFO溢出以及数据就绪中断 */
}
/*
* @description : 设置ICM20608传感器,可以用于陀螺仪、加速度计设置
* @param - dev : icm20608设备
* @param - reg : 要设置的通道寄存器首地址。
* @param - anix : 要设置的通道,比如X,Y,Z。
* @param - val : 要设置的值。
* @return : 0,成功;其他值,错误
*/
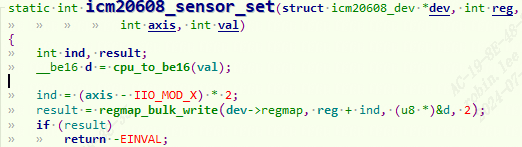
static int icm20608_sensor_set(struct icm20608_dev *dev, int reg,
int axis, int val)
{
int ind, result;
__be16 d = cpu_to_be16(val);
ind = (axis - IIO_MOD_X) * 2;
result = regmap_bulk_write(dev->regmap, reg + ind, (u8 *)&d, 2);
if (result)
return -EINVAL;
return 0;
}
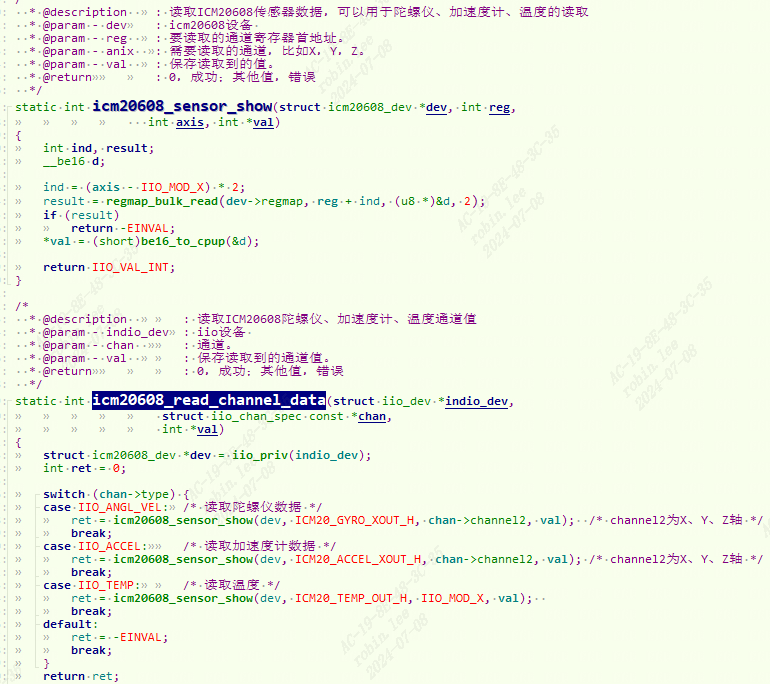
/*
* @description : 读取ICM20608传感器数据,可以用于陀螺仪、加速度计、温度的读取
* @param - dev : icm20608设备
* @param - reg : 要读取的通道寄存器首地址。
* @param - anix : 需要读取的通道,比如X,Y,Z。
* @param - val : 保存读取到的值。
* @return : 0,成功;其他值,错误
*/
static int icm20608_sensor_show(struct icm20608_dev *dev, int reg,
int axis, int *val)
{
int ind, result;
__be16 d;
ind = (axis - IIO_MOD_X) * 2;
result = regmap_bulk_read(dev->regmap, reg + ind, (u8 *)&d, 2);
if (result)
return -EINVAL;
*val = (short)be16_to_cpup(&d);
return IIO_VAL_INT;
}
/*
* @description : 读取ICM20608陀螺仪、加速度计、温度通道值
* @param - indio_dev : iio设备
* @param - chan : 通道。
* @param - val : 保存读取到的通道值。
* @return : 0,成功;其他值,错误
*/
static int icm20608_read_channel_data(struct iio_dev *indio_dev,
struct iio_chan_spec const *chan,
int *val)
{
struct icm20608_dev *dev = iio_priv(indio_dev);
int ret = 0;
switch (chan->type) {
case IIO_ANGL_VEL: /* 读取陀螺仪数据 */
ret = icm20608_sensor_show(dev, ICM20_GYRO_XOUT_H, chan->channel2, val); /* channel2为X、Y、Z轴 */
break;
case IIO_ACCEL: /* 读取加速度计数据 */
ret = icm20608_sensor_show(dev, ICM20_ACCEL_XOUT_H, chan->channel2, val); /* channel2为X、Y、Z轴 */
break;
case IIO_TEMP: /* 读取温度 */
ret = icm20608_sensor_show(dev, ICM20_TEMP_OUT_H, IIO_MOD_X, val);
break;
default:
ret = -EINVAL;
break;
}
return ret;
}
/*
* @description : 设置ICM20608的陀螺仪计量程(分辨率)
* @param - dev : icm20608设备
* @param - val : 量程(分辨率值)。
* @return : 0,成功;其他值,错误
*/
static int icm20608_write_gyro_scale(struct icm20608_dev *dev, int val)
{
int result, i;
u8 d;
for (i = 0; i < ARRAY_SIZE(gyro_scale_icm20608); ++i) {
if (gyro_scale_icm20608[i] == val) {
d = (i << 3);
result = regmap_write(dev->regmap, ICM20_GYRO_CONFIG, d);
if (result)
return result;
return 0;
}
}
return -EINVAL;
}
/*
* @description : 设置ICM20608的加速度计量程(分辨率)
* @param - dev : icm20608设备
* @param - val : 量程(分辨率值)。
* @return : 0,成功;其他值,错误
*/
static int icm20608_write_accel_scale(struct icm20608_dev *dev, int val)
{
int result, i;
u8 d;
for (i = 0; i < ARRAY_SIZE(accel_scale_icm20608); ++i) {
if (accel_scale_icm20608[i] == val) {
d = (i << 3);
result = regmap_write(dev->regmap, ICM20_ACCEL_CONFIG, d);
if (result)
return result;
return 0;
}
}
return -EINVAL;
}
/*
* @description : 读函数,当读取sysfs中的文件的时候最终此函数会执行,此函数
* :里面会从传感器里面读取各种数据,然后上传给应用。
* @param - indio_dev : iio_dev
* @param - chan : 通道
* @param - val : 读取的值,如果是小数值的话,val是整数部分。
* @param - val2 : 读取的值,如果是小数值的话,val2是小数部分。
* @param - mask : 掩码。
* @return : 0,成功;其他值,错误
*/
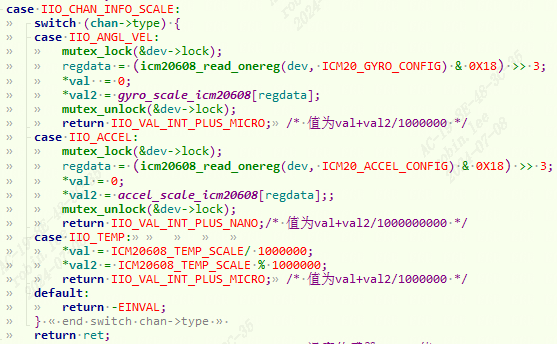
static int icm20608_read_raw(struct iio_dev *indio_dev,
struct iio_chan_spec const *chan,
int *val, int *val2, long mask)
{
struct icm20608_dev *dev = iio_priv(indio_dev);
int ret = 0;
unsigned char regdata = 0;
switch (mask) {
case IIO_CHAN_INFO_RAW: /* 读取ICM20608加速度计、陀螺仪、温度传感器原始值 */
mutex_lock(&dev->lock); /* 上锁 */
ret = icm20608_read_channel_data(indio_dev, chan, val); /* 读取通道值 */
mutex_unlock(&dev->lock); /* 释放锁 */
return ret;
case IIO_CHAN_INFO_SCALE:
switch (chan->type) {
case IIO_ANGL_VEL:
mutex_lock(&dev->lock);
regdata = (icm20608_read_onereg(dev, ICM20_GYRO_CONFIG) & 0X18) >> 3;
*val = 0;
*val2 = gyro_scale_icm20608[regdata];
mutex_unlock(&dev->lock);
return IIO_VAL_INT_PLUS_MICRO; /* 值为val+val2/1000000 */
case IIO_ACCEL:
mutex_lock(&dev->lock);
regdata = (icm20608_read_onereg(dev, ICM20_ACCEL_CONFIG) & 0X18) >> 3;
*val = 0;
*val2 = accel_scale_icm20608[regdata];;
mutex_unlock(&dev->lock);
return IIO_VAL_INT_PLUS_NANO;/* 值为val+val2/1000000000 */
case IIO_TEMP:
*val = ICM20608_TEMP_SCALE/ 1000000;
*val2 = ICM20608_TEMP_SCALE % 1000000;
return IIO_VAL_INT_PLUS_MICRO; /* 值为val+val2/1000000 */
default:
return -EINVAL;
}
return ret;
case IIO_CHAN_INFO_OFFSET: /* ICM20608温度传感器offset值 */
switch (chan->type) {
case IIO_TEMP:
*val = ICM20608_TEMP_OFFSET;
return IIO_VAL_INT;
default:
return -EINVAL;
}
return ret;
case IIO_CHAN_INFO_CALIBBIAS: /* ICM20608加速度计和陀螺仪校准值 */
switch (chan->type) {
case IIO_ANGL_VEL: /* 陀螺仪的校准值 */
mutex_lock(&dev->lock);
ret = icm20608_sensor_show(dev, ICM20_XG_OFFS_USRH, chan->channel2, val);
mutex_unlock(&dev->lock);
return ret;
case IIO_ACCEL: /* 加速度计的校准值 */
mutex_lock(&dev->lock);
ret = icm20608_sensor_show(dev, ICM20_XA_OFFSET_H, chan->channel2, val);
mutex_unlock(&dev->lock);
return ret;
default:
return -EINVAL;
}
default:
return ret -EINVAL;
}
}
/*
* @description : 写函数,当向sysfs中的文件写数据的时候最终此函数会执行,一般在此函数
* :里面设置传感器,比如量程等。
* @param - indio_dev : iio_dev
* @param - chan : 通道
* @param - val : 应用程序写入的值,如果是小数值的话,val是整数部分。
* @param - val2 : 应用程序写入的值,如果是小数值的话,val2是小数部分。
* @return : 0,成功;其他值,错误
*/
static int icm20608_write_raw(struct iio_dev *indio_dev,
struct iio_chan_spec const *chan,
int val, int val2, long mask)
{
struct icm20608_dev *dev = iio_priv(indio_dev);
int ret = 0;
switch (mask) {
case IIO_CHAN_INFO_SCALE: /* 设置陀螺仪和加速度计的分辨率 */
switch (chan->type) {
case IIO_ANGL_VEL: /* 设置陀螺仪 */
mutex_lock(&dev->lock);
ret = icm20608_write_gyro_scale(dev, val2);
mutex_unlock(&dev->lock);
break;
case IIO_ACCEL: /* 设置加速度计 */
mutex_lock(&dev->lock);
ret = icm20608_write_accel_scale(dev, val2);
mutex_unlock(&dev->lock);
break;
default:
ret = -EINVAL;
break;
}
break;
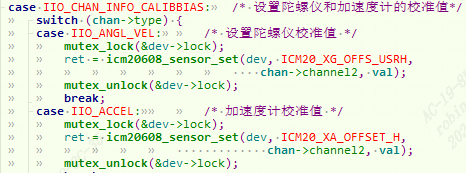
case IIO_CHAN_INFO_CALIBBIAS: /* 设置陀螺仪和加速度计的校准值*/
switch (chan->type) {
case IIO_ANGL_VEL: /* 设置陀螺仪校准值 */
mutex_lock(&dev->lock);
ret = icm20608_sensor_set(dev, ICM20_XG_OFFS_USRH,
chan->channel2, val);
mutex_unlock(&dev->lock);
break;
case IIO_ACCEL: /* 加速度计校准值 */
mutex_lock(&dev->lock);
ret = icm20608_sensor_set(dev, ICM20_XA_OFFSET_H,
chan->channel2, val);
mutex_unlock(&dev->lock);
break;
default:
ret = -EINVAL;
break;
}
break;
default:
ret = -EINVAL;
break;
}
return ret;
}
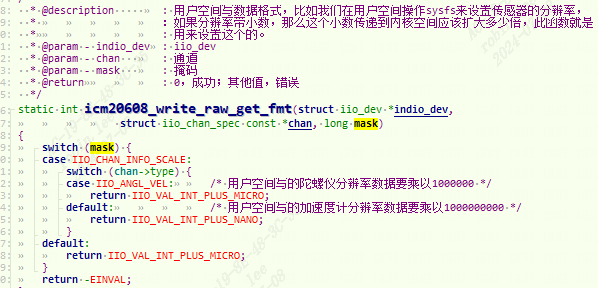
/*
* @description : 用户空间写数据格式,比如我们在用户空间操作sysfs来设置传感器的分辨率,
* :如果分辨率带小数,那么这个小数传递到内核空间应该扩大多少倍,此函数就是
* : 用来设置这个的。
* @param - indio_dev : iio_dev
* @param - chan : 通道
* @param - mask : 掩码
* @return : 0,成功;其他值,错误
*/
static int icm20608_write_raw_get_fmt(struct iio_dev *indio_dev,
struct iio_chan_spec const *chan, long mask)
{
switch (mask) {
case IIO_CHAN_INFO_SCALE:
switch (chan->type) {
case IIO_ANGL_VEL: /* 用户空间写的陀螺仪分辨率数据要乘以1000000 */
return IIO_VAL_INT_PLUS_MICRO;
default: /* 用户空间写的加速度计分辨率数据要乘以1000000000 */
return IIO_VAL_INT_PLUS_NANO;
}
default:
return IIO_VAL_INT_PLUS_MICRO;
}
return -EINVAL;
}
static const struct iio_info icm20608_info = {
.read_raw = icm20608_read_raw,
.write_raw = icm20608_write_raw,
.write_raw_get_fmt = &icm20608_write_raw_get_fmt, /* 用户空间写数据格式 */
};
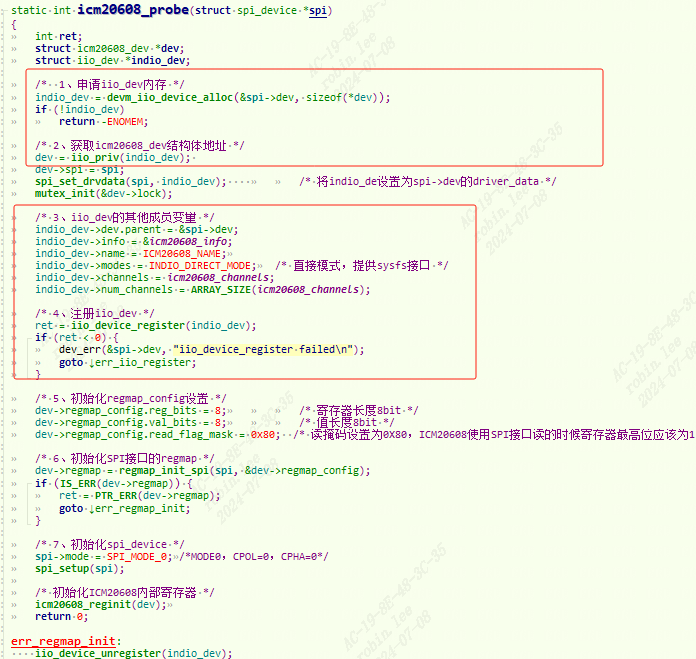
static int icm20608_probe(struct spi_device *spi)
{
int ret;
struct icm20608_dev *dev;
struct iio_dev *indio_dev;
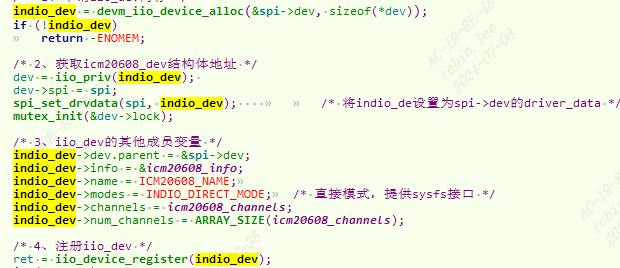
/* 1、申请iio_dev内存 */
indio_dev = devm_iio_device_alloc(&spi->dev, sizeof(*dev));
if (!indio_dev)
return -ENOMEM;
/* 2、获取icm20608_dev结构体地址 */
dev = iio_priv(indio_dev);
dev->spi = spi;
spi_set_drvdata(spi, indio_dev); /* 将indio_de设置为spi->dev的driver_data */
mutex_init(&dev->lock);
/* 3、iio_dev的其他成员变量 */
indio_dev->dev.parent = &spi->dev;
indio_dev->info = &icm20608_info;
indio_dev->name = ICM20608_NAME;
indio_dev->modes = INDIO_DIRECT_MODE; /* 直接模式,提供sysfs接口 */
indio_dev->channels = icm20608_channels;
indio_dev->num_channels = ARRAY_SIZE(icm20608_channels);
/* 4、注册iio_dev */
ret = iio_device_register(indio_dev);
if (ret < 0) {
dev_err(&spi->dev, "iio_device_register failed\n");
goto err_iio_register;
}
/* 5、初始化regmap_config设置 */
dev->regmap_config.reg_bits = 8; /* 寄存器长度8bit */
dev->regmap_config.val_bits = 8; /* 值长度8bit */
dev->regmap_config.read_flag_mask = 0x80; /* 读掩码设置为0X80,ICM20608使用SPI接口读的时候寄存器最高位应该为1 */
/* 6、初始化SPI接口的regmap */
dev->regmap = regmap_init_spi(spi, &dev->regmap_config);
if (IS_ERR(dev->regmap)) {
ret = PTR_ERR(dev->regmap);
goto err_regmap_init;
}
/* 7、初始化spi_device */
spi->mode = SPI_MODE_0; /*MODE0,CPOL=0,CPHA=0*/
spi_setup(spi);
/* 初始化ICM20608内部寄存器 */
icm20608_reginit(dev);
return 0;
err_regmap_init:
iio_device_unregister(indio_dev);
err_iio_register:
return ret;
}
static int icm20608_remove(struct spi_device *spi)
{
struct iio_dev *indio_dev = spi_get_drvdata(spi);
struct icm20608_dev *dev;
dev = iio_priv(indio_dev);
/* 1、删除regmap */
regmap_exit(dev->regmap);
/* 2、注销IIO */
iio_device_unregister(indio_dev);
return 0;
}
static const struct spi_device_id icm20608_id[] = {
{"alientek,icm20608", 0},
{}
};
static const struct of_device_id icm20608_of_match[] = {
{ .compatible = "alientek,icm20608" },
{ /* Sentinel */ }
};
static struct spi_driver icm20608_driver = {
.probe = icm20608_probe,
.remove = icm20608_remove,
.driver = {
.owner = THIS_MODULE,
.name = "icm20608",
.of_match_table = icm20608_of_match,
},
.id_table = icm20608_id,
};
static int __init icm20608_init(void)
{
return spi_register_driver(&icm20608_driver);
}
static void __exit icm20608_exit(void)
{
spi_unregister_driver(&icm20608_driver);
}
module_init(icm20608_init);
module_exit(icm20608_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ALIENTEK");
MODULE_INFO(intree, "Y");
5.2.1 probe
还是按照spi子系统框架,probe时利用iio子系统,初始化iio_dev。
iio_info属性赋值:

iio_channels属性赋值:
温度通道:
-
info_mask_separate设置为IIO_CHAN_INFO_RAW,IIO_CHAN_INFO_SCALE, IIO_CHAN_INFO_OFFSET此通。IIO_CHAN_INFO_RAW为温度通道的原始值,IIO_CHAN_INFO_OFFSET是ICM20608温度 offset 值,这个要查阅数 据手册。IIO_CHAN_INFO_SCALE是ICM20608的比例,也就是一个单位的原始值为多少℃, 这个也要查阅ICM20608的数据手册。 -
扫描元素设置成
SCAN_TEMP。 -
扫描类型:有符号数据,数据位数16位,存储位数16位,右移位数0, 大端传输(一般MSB传输)
陀螺仪通道:
-
modified成员变量为 1,所以channel2就是通道修饰符,用来指定 X、Y、Z 轴。 -
扫描元素设置
SCAN_GYRO_X, Y,Z。 -
info_mask_separate设置为IIO_CHAN_INFO_RAW, IIO_CHAN_INFO_CALIBBIAS此通。“scale”是比例的意思,在这里就是量程(分辨率),因为 ICM20608 的陀螺仪和加速度计的量程是可以调整的,量程不同分辨率也就不同。设置每个通道的IIO_CHAN_INFO_RAW和IIO_CHAN_INFO_CALIBBIAS这两个属性都是独立的,IIO_CHAN_INFO_RAW表示 ICM20608 每个通道的原始值,这个肯定 是每个通道独立的。IIO_CHAN_INFO_CALIBBIAS是 ICM20608 每个通道的校准值,这个是 ICM20608 的特性,不是所有的传感器都有校准值,一切都要以实际所使用的传感器为准。 -
info_mask_shared_by_type设置为IIO_CHAN_INFO_SCALE此通。表示量程分辨率共享对陀螺仪通道。 -
扫描类型:有符号数据,数据位数16位,存储位数16位,右移位数0, 大端传输(一般MSB传输)
加速度通道:同理与陀螺仪通道.
INDIO_DIRECT_MODE 直接模式,提供sysfs接口。
5.2.2 icm20608_read_raw
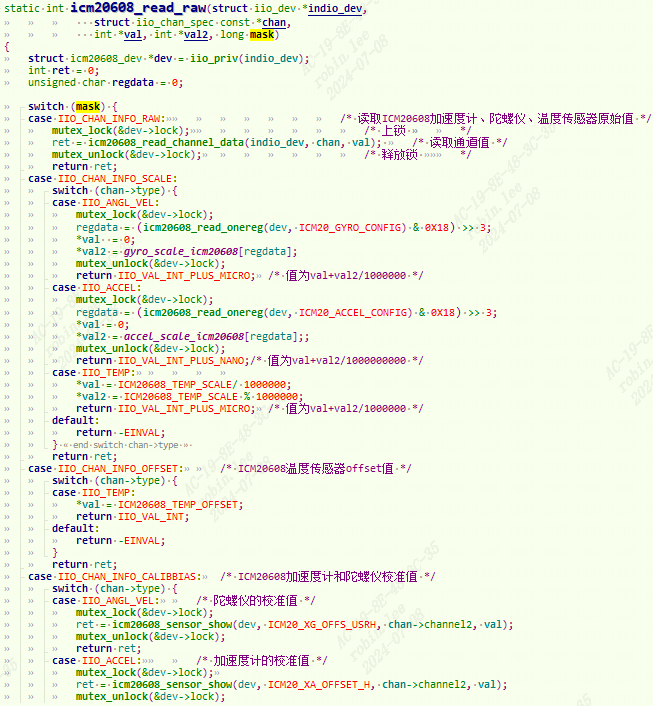
5.2.2.1 读raw数据
icm20608_read_raw会传入具体通道和mask, 比如温度通道的raw,传入ICM20_TEMP_OUT_H寄存器,IIO_MOD_X那么ind就等于0,那么regmap_bulk_read出来就是一个16位的温度值。
同理,读加速度通道,传入ICM20_ACCEL_XOUT_H寄存器,ind = (IIO_MOD_X - IIO_MOD_X )*2 = 0;,因此读出16bit的x数据。再次传入ind = (IIO_MOD_Y - IIO_MOD_X)*2 = 2,得到ICM20_ACCEL_YOUT_H寄存器,因此读取出16bit的y数据。再次传入ind = (IIO_MOD_Z - IIO_MOD_X)*2 = 4,得到ICM20_ACCEL_ZOUT_H寄存器,因此读取出16bit的z数据。
同理,读陀螺仪通道。
5.2.2.2 读量程
温度通道: 直接用预设量程即可或者val1,val2。分别表示整数,小数。
加速度通道: 获取量程参考数据手册:icm20608控制寄存器
根据读到的寄存器值:regdata配置量程如下:
/*
* icm20608陀螺仪分辨率,对应250、500、1000、2000,计算方法:
* 以正负250度量程为例,500/2^16=0.007629,扩大1000000倍,就是7629
*/
static const int gyro_scale_icm20608[] = {7629, 15258, 30517, 61035};
/*
* icm20608加速度计分辨率,对应2、4、8、16 计算方法:
* 以正负2g量程为例,4/2^16=0.000061035,扩大1000000000倍,就是61035
*/
static const int accel_scale_icm20608[] = {61035, 122070, 244140, 488281};
陀螺仪通道:同理
陀螺仪量程计算:
可选的量程有±250、±500、±1000 和±2000°/s。以± 250 这个量程为例,每个数值对应的度数就是 500/2^10≈0.007629°/s。同理,±500 量程对应 的度数为 0.015258,±1000 量程对应的度数为 0.030517,±2000 量程为0.061035。假设现在设 置量程为±2000,读取到的原始值为 12540,那么对应的度数就是 12540*0.061035≈765.37°/s。 注意,这里扩大了 1000000 倍。
加速度量程计算:
计算方法和陀螺仪一样。这里扩大了 1000000000 倍。
5.2.2.3 读offset
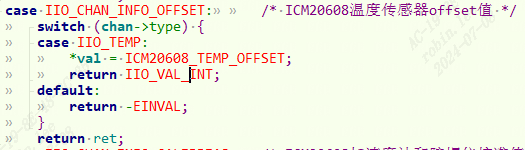
只有温度有offset。
5.2.3 icm20608_write_raw
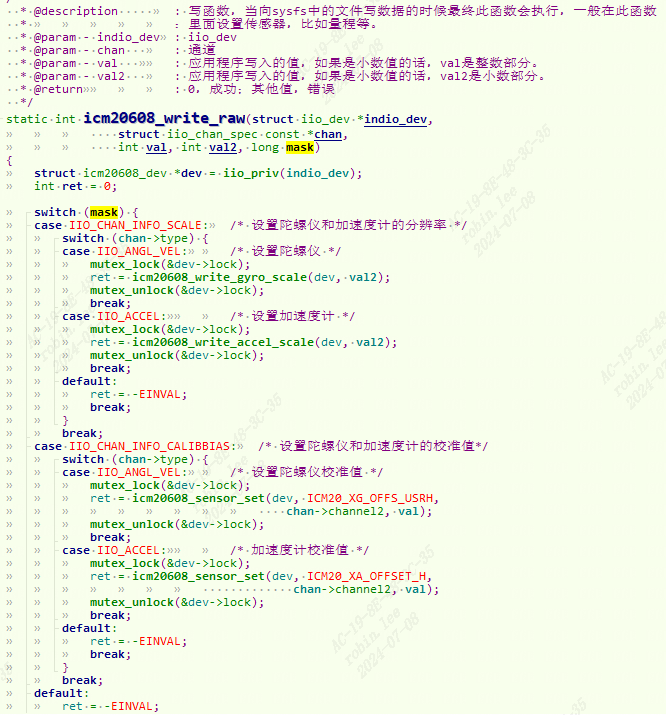
通过写寄存器来配置量程,校准值。
5.2.3.1 配置量程
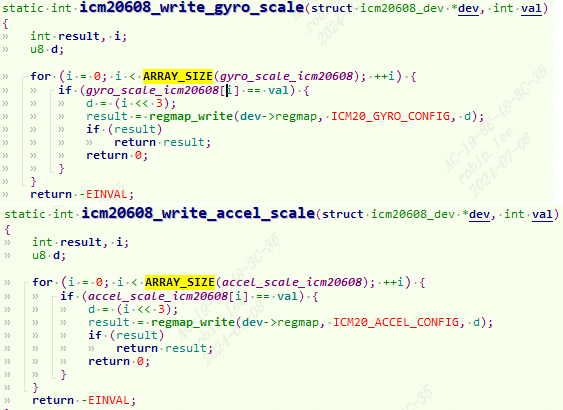
根据设置的val量程值,匹配到i量程等级,d<<3然后设置量程等级。
5.2.3.2 配置校准值

根据静态偏移寄存器,进行校准,写入校准值。
5.2.4 icm20608_write_raw_get_fmt
用户空间设置数据格式。
陀螺仪通道:规定用户空间写的陀螺仪分辨率数据要乘以1000000。
加速度通道:规定用户空间写的陀螺仪分辨率数据要乘以1000000000。
比如我们在用户空间要设置加速度计量程为±4g,只需要向 in_accel_scale 写 入 0.000122070 , 那 么 最 终 传 入 到 驱 动 里 面 的 就 是 0.000122070*1000000000=122070。
5.3 测试
进入“/sys/bus/iio/devices/”目录:可以看到,此时有两个 IIO 设备“iio:device0”,iio:device0 是 I.MX6ULL 内 部 ADC,iio:device1 才是 ICM20608。


可以看出,iio:device1 对应spi2.0 上的设备,也就是 ICM20608。
此目录下有 很多文件,比如in_accel_scale、in_accel_x_calibias、in_accel_x_raw等,这些就是我们设置的通道。in_accel_scale 就是加速度计的比例,也就是分辨率(量程),in_accel_x_calibias 就是加速度 计 X 轴的校准值,in_accel_x_raw 就是加速度计的 X 轴原始值。我们在配置通道的时候,设置 了类型相同的所有通道共用 SCALE,所以这里只有一个 in_accel_scale,而 X、Y、Z 轴的原始值和校准值每个轴都有一个文件,陀螺仪和温度计同理。
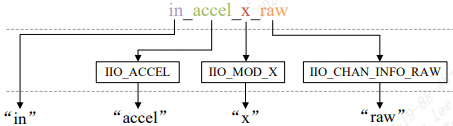
5.3.1 通道文件命名方式
源码见4.1.1 iio_device_register_sysfs过程。
IIO_CHAN_INFO_RAW 和 IIO_CHAN_INFO_CALIBBIAS这两个专属属性,对应in_accel_x_raw 和 in_accel_x_calibias 这两个文件。
通道的命名:[direction]_[type]_[index]_[modifier]_[info_mask]
direction:为属性对应的方向
static const char * const iio_direction[] = {
[0] = "in",
[1] = "out",
};
type:也就是配置通道的时候 type 值,type 对应的字符可以参考 iio_chan_type_name_spec:
static const char * const iio_chan_type_name_spec[] = {
[IIO_VOLTAGE] = "voltage",
[IIO_CURRENT] = "current",
[IIO_POWER] = "power",
[IIO_ACCEL] = "accel",
[IIO_ANGL_VEL] = "anglvel",
...
}
index:索引,如果配置通道的时候设置了 indexed=1,那么就会使用通道的 channel 成员变 量来替代此部分命名。比如,有个 ADC 芯片支持 8 个通道,那么就可以使用 channel 来表示对 应的通道,最终在用户空间呈现的每个通道文件名的 index 部分就是通道号。
modifier:当通道的 modified 成员变量为 1 的时候,channel2 就是修饰符, iio_modifier_names:
static const char * const iio_modifier_names[] = {
[IIO_MOD_X] = "x",
[IIO_MOD_Y] = "y",
[IIO_MOD_Z] = "z",
......
[IIO_MOD_PM4] = "pm4",
[IIO_MOD_PM10] = "pm10",
};
info_mask:属性掩码,也就是属性:
static const char * const iio_chan_info_postfix[] = {
[IIO_CHAN_INFO_RAW] = "raw",
[IIO_CHAN_INFO_PROCESSED] = "input",
[IIO_CHAN_INFO_SCALE] = "scale",
[IIO_CHAN_INFO_OFFSET] = "offset",
[IIO_CHAN_INFO_CALIBSCALE] = "calibscale",
[IIO_CHAN_INFO_CALIBBIAS] = "calibbias",
......
[IIO_CHAN_INFO_DEBOUNCE_TIME] = "debounce_time",
[IIO_CHAN_INFO_CALIBEMISSIVITY] = "calibemissivity",
[IIO_CHAN_INFO_OVERSAMPLING_RATIO] = "oversampling_ratio",
};
综上所述,in_accel_x_raw 组成形式如图:
5.3.2 读取raw数据
进入“/sys/bus/iio/devices/”目录,cat iio:device1/in_ccel_x,这时驱动中的icm20608_read_raw执行。
读取一下 in_accel_scale 这个文件,这是加速度计的分辨率,我们默认设置了加速度计 量程为±16g,因此分辨率为 0.000488281。

这时候有朋友可能会疑问,我们设置加速度计±16g 的分辨率为 488281,也就是扩大了1000000000 倍,为啥这里读出来的是 0.000488281 这个原始值?
驱动返回的是IIO_VAL_INT_PLUS_NANO, 因 此 用 户 空 间 得 到 分 辨 率 以 后 会 除 以 1000000000 , 得 到 真 实 的 分 辨 率 , 488281/1000000000=0.000488281。
再读取一下 in_accel_z_raw,加速度计的 Z 轴原始值。静态情况 下 Z 轴应该是 1g 的重力加速度计。

2074×0.000488281≈1.01g,此时 Z 轴重力为 1g,结果正确。
5.3.3 编写应用程序测试
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "sys/ioctl.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
#include <poll.h>
#include <sys/select.h>
#include <sys/time.h>
#include <signal.h>
#include <fcntl.h>
#include <errno.h>
/* 字符串转数字,将浮点小数字符串转换为浮点数数值 */
#define SENSOR_FLOAT_DATA_GET(ret, index, str, member)\
ret = file_data_read(file_path[index], str);\
dev->member = atof(str);\
/* 字符串转数字,将整数字符串转换为整数数值 */
#define SENSOR_INT_DATA_GET(ret, index, str, member)\
ret = file_data_read(file_path[index], str);\
dev->member = atoi(str);\
/* icm20608 iio框架对应的文件路径 */
static char *file_path[] = {
"/sys/bus/iio/devices/iio:device1/in_accel_scale",
"/sys/bus/iio/devices/iio:device1/in_accel_x_calibbias",
"/sys/bus/iio/devices/iio:device1/in_accel_x_raw",
"/sys/bus/iio/devices/iio:device1/in_accel_y_calibbias",
"/sys/bus/iio/devices/iio:device1/in_accel_y_raw",
"/sys/bus/iio/devices/iio:device1/in_accel_z_calibbias",
"/sys/bus/iio/devices/iio:device1/in_accel_z_raw",
"/sys/bus/iio/devices/iio:device1/in_anglvel_scale",
"/sys/bus/iio/devices/iio:device1/in_anglvel_x_calibbias",
"/sys/bus/iio/devices/iio:device1/in_anglvel_x_raw",
"/sys/bus/iio/devices/iio:device1/in_anglvel_y_calibbias",
"/sys/bus/iio/devices/iio:device1/in_anglvel_y_raw",
"/sys/bus/iio/devices/iio:device1/in_anglvel_z_calibbias",
"/sys/bus/iio/devices/iio:device1/in_anglvel_z_raw",
"/sys/bus/iio/devices/iio:device1/in_temp_offset",
"/sys/bus/iio/devices/iio:device1/in_temp_raw",
"/sys/bus/iio/devices/iio:device1/in_temp_scale",
};
/* 文件路径索引,要和file_path里面的文件顺序对应 */
enum path_index {
IN_ACCEL_SCALE = 0,
IN_ACCEL_X_CALIBBIAS,
IN_ACCEL_X_RAW,
IN_ACCEL_Y_CALIBBIAS,
IN_ACCEL_Y_RAW,
IN_ACCEL_Z_CALIBBIAS,
IN_ACCEL_Z_RAW,
IN_ANGLVEL_SCALE,
IN_ANGLVEL_X_CALIBBIAS,
IN_ANGLVEL_X_RAW,
IN_ANGLVEL_Y_CALIBBIAS,
IN_ANGLVEL_Y_RAW,
IN_ANGLVEL_Z_CALIBBIAS,
IN_ANGLVEL_Z_RAW,
IN_TEMP_OFFSET,
IN_TEMP_RAW,
IN_TEMP_SCALE,
};
/*
* icm20608数据设备结构体
*/
struct icm20608_dev{
int accel_x_calibbias, accel_y_calibbias, accel_z_calibbias;
int accel_x_raw, accel_y_raw, accel_z_raw;
int gyro_x_calibbias, gyro_y_calibbias, gyro_z_calibbias;
int gyro_x_raw, gyro_y_raw, gyro_z_raw;
int temp_offset, temp_raw;
float accel_scale, gyro_scale, temp_scale;
float gyro_x_act, gyro_y_act, gyro_z_act;
float accel_x_act, accel_y_act, accel_z_act;
float temp_act;
};
struct icm20608_dev icm20608;
/*
* @description : 读取指定文件内容
* @param - filename : 要读取的文件路径
* @param - str : 读取到的文件字符串
* @return : 0 成功;其他 失败
*/
static int file_data_read(char *filename, char *str)
{
int ret = 0;
FILE *data_stream;
data_stream = fopen(filename, "r"); /* 只读打开 */
if(data_stream == NULL) {
printf("can't open file %s\r\n", filename);
return -1;
}
ret = fscanf(data_stream, "%s", str);
if(!ret) {
printf("file read error!\r\n");
} else if(ret == EOF) {
/* 读到文件末尾的话将文件指针重新调整到文件头 */
fseek(data_stream, 0, SEEK_SET);
}
fclose(data_stream); /* 关闭文件 */
return 0;
}
/*
* @description : 获取ICM20608数据
* @param - dev : 设备结构体
* @return : 0 成功;其他 失败
*/
static int sensor_read(struct icm20608_dev *dev)
{
int ret = 0;
char str[50];
/* 1、获取陀螺仪原始数据 */
SENSOR_FLOAT_DATA_GET(ret, IN_ANGLVEL_SCALE, str, gyro_scale);
SENSOR_INT_DATA_GET(ret, IN_ANGLVEL_X_RAW, str, gyro_x_raw);
SENSOR_INT_DATA_GET(ret, IN_ANGLVEL_Y_RAW, str, gyro_y_raw);
SENSOR_INT_DATA_GET(ret, IN_ANGLVEL_Z_RAW, str, gyro_z_raw);
/* 2、获取加速度计原始数据 */
SENSOR_FLOAT_DATA_GET(ret, IN_ACCEL_SCALE, str, accel_scale);
SENSOR_INT_DATA_GET(ret, IN_ACCEL_X_RAW, str, accel_x_raw);
SENSOR_INT_DATA_GET(ret, IN_ACCEL_Y_RAW, str, accel_y_raw);
SENSOR_INT_DATA_GET(ret, IN_ACCEL_Z_RAW, str, accel_z_raw);
/* 3、获取温度值 */
SENSOR_FLOAT_DATA_GET(ret, IN_TEMP_SCALE, str, temp_scale);
SENSOR_INT_DATA_GET(ret, IN_TEMP_OFFSET, str, temp_offset);
SENSOR_INT_DATA_GET(ret, IN_TEMP_RAW, str, temp_raw);
/* 3、转换为实际数值 */
dev->accel_x_act = dev->accel_x_raw * dev->accel_scale;
dev->accel_y_act = dev->accel_y_raw * dev->accel_scale;
dev->accel_z_act = dev->accel_z_raw * dev->accel_scale;
dev->gyro_x_act = dev->gyro_x_raw * dev->gyro_scale;
dev->gyro_y_act = dev->gyro_y_raw * dev->gyro_scale;
dev->gyro_z_act = dev->gyro_z_raw * dev->gyro_scale;
dev->temp_act = ((dev->temp_raw - dev->temp_offset) / dev->temp_scale) + 25;
return ret;
}
/*
* @description : main主程序
* @param - argc : argv数组元素个数
* @param - argv : 具体参数
* @return : 0 成功;其他 失败
*/
int main(int argc, char *argv[])
{
int ret = 0;
if (argc != 1) {
printf("Error Usage!\r\n");
return -1;
}
while (1) {
ret = sensor_read(&icm20608);
if(ret == 0) { /* 数据读取成功 */
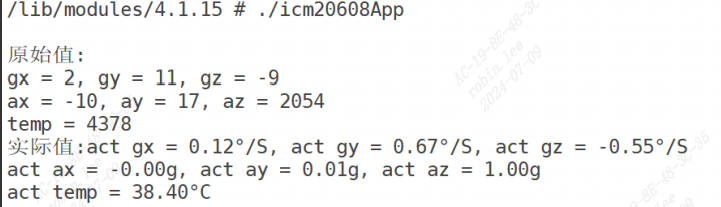
printf("\r\n原始值:\r\n");
printf("gx = %d, gy = %d, gz = %d\r\n", icm20608.gyro_x_raw, icm20608.gyro_y_raw, icm20608.gyro_z_raw);
printf("ax = %d, ay = %d, az = %d\r\n", icm20608.accel_x_raw, icm20608.accel_y_raw, icm20608.accel_z_raw);
printf("temp = %d\r\n", icm20608.temp_raw);
printf("实际值:");
printf("act gx = %.2f°/S, act gy = %.2f°/S, act gz = %.2f°/S\r\n", icm20608.gyro_x_act, icm20608.gyro_y_act, icm20608.gyro_z_act);
printf("act ax = %.2fg, act ay = %.2fg, act az = %.2fg\r\n", icm20608.accel_x_act, icm20608.accel_y_act, icm20608.accel_z_act);
printf("act temp = %.2f°C\r\n", icm20608.temp_act);
}
usleep(100000); /*100ms */
}
return 0;
}
6 IIO实验-操作vf610_adc.c
以imx6ull芯片为例子,drivers/iio/adc/vf610_adc.c
6.1 dts描述
dtsi描述如下:默认是关闭的
adc1: adc@02198000 {
compatible = "fsl,imx6ul-adc", "fsl,vf610-adc";
reg = <0x02198000 0x4000>;
interrupts = <GIC_SPI 100 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&clks IMX6UL_CLK_ADC1>;
num-channels = <2>;
clock-names = "adc";
status = "disabled";
};
我们最后在 imx6ull-alientek-emmc.dts添加节点内容:
pinctrl_adc1: adc1grp {
fsl,pins = <MX6UL_PAD_GPIO1_IO01__GPIO1_IO01 0xb0>;
};
reg_vref_adc: regulator@2 {
compatible = "regulator-fixed";
regulator-name = "VREF_3V3";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
};
&adc1 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_adc1>;
num-channels = <2>;
vref-supply = <®_vref_adc>;
status = "okay";
};
- 添加 ADC 使用的
GPIO1_IO01引脚配置信息 regulators节点下添加参考电源子节点,最后status设置成okay
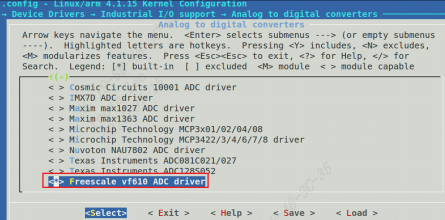
6.2 使能 ADC 驱动
-> Device Drivers
-> Industrial I/O support
-> Analog to digital converters
-> <*> Freescale vf610 ADC driver //选中
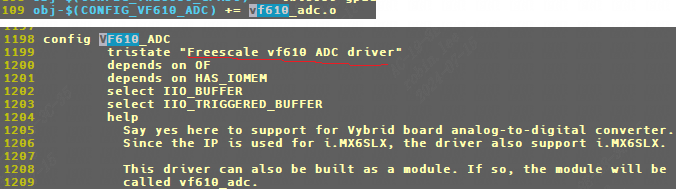
drivers/iio/adc/下的makefile和Kconfig:
6.3 驱动代码分析

6.3.1 probe
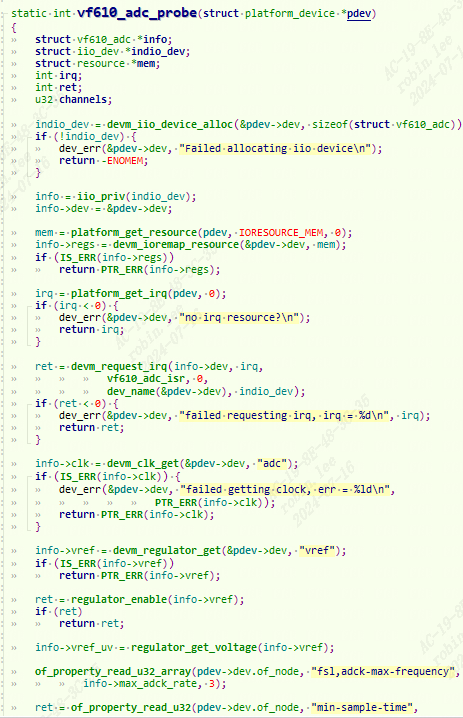
申请初始化iio设备,alloc iio设备有多分一块内存给info结构体。
从dts获取寄存器地址信息,进行ioremap。获取中断号,注册中断服务程序。
获取时钟资源,电源资源,使能电源输出。并且获取电源参考电压vref_uv.
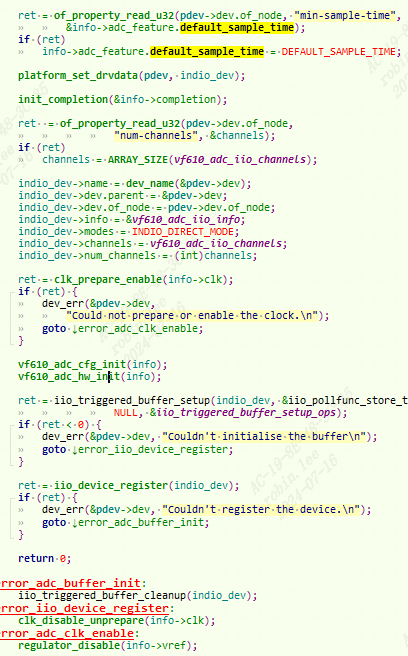
获取adc采样周期,num-channels =2.
中间vf610_adc_cfg_init和vf610_adc_hw_init是ADC controller的寄存器配置不展开介绍。可以参考裸机实验IMX6ULL ADC控制器
然后设置iio_dev结构体,最后注册iio设备。
6.3.2 vf610_read_raw
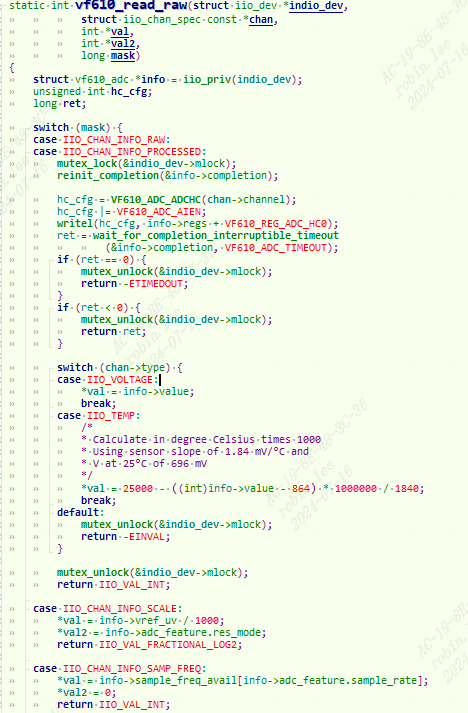
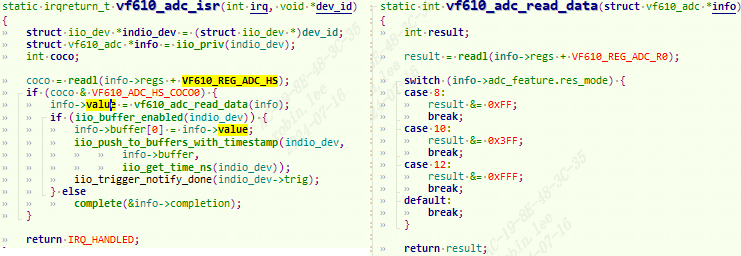
读取 ADC 原始数据值,type 值为 IIO_VOLTAGE,也就是读取电压值。这里info->value是怎么来的呢?
当然是中断服务程序进行ADC采样啊,如下:
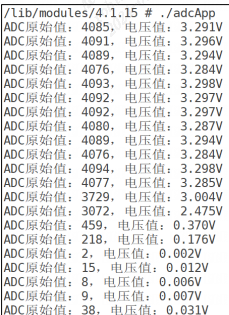
6.4 用户态测试
进入/sys/bus/iio/devices/iio:device0 目录下,该iio就是对应vf610这个ADC:

in_voltage1_raw:ADC1 通道 1 原始值文件。
in_voltage_scale:ADC1 比例文件(分辨率),单位为 mV。实际电压值(mV)=in_voltage1_raw* in_voltage_scale
我的开发板此时 in_voltage1_raw 和 in_voltage_scale 这两个文件内容如下:

经过计算,实际电压:991*0.805664062≈798.4mV,也就是 0.7984V。
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "sys/ioctl.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
#include <poll.h>
#include <sys/select.h>
#include <sys/time.h>
#include <signal.h>
#include <fcntl.h>
#include <errno.h>
/* 字符串转数字,将浮点小数字符串转换为浮点数数值 */
#define SENSOR_FLOAT_DATA_GET(ret, index, str, member)\
ret = file_data_read(file_path[index], str);\
dev->member = atof(str);\
/* 字符串转数字,将整数字符串转换为整数数值 */
#define SENSOR_INT_DATA_GET(ret, index, str, member)\
ret = file_data_read(file_path[index], str);\
dev->member = atoi(str);\
static char *file_path[] = {
"/sys/bus/iio/devices/iio:device0/in_voltage_scale",
"/sys/bus/iio/devices/iio:device0/in_voltage1_raw",
};
enum path_index {
IN_VOLTAGE_SCALE = 0,
IN_VOLTAGE_RAW,
};
struct adc_dev{
int raw;
float scale;
float act;
};
struct adc_dev imx6ulladc;
static int file_data_read(char *filename, char *str) {
int ret = 0;
FILE *data_stream;
data_stream = fopen(filename, "r"); /* 只读打开 */
if(data_stream == NULL) {
printf("can't open file %s\r\n", filename);
return -1;
}
ret = fscanf(data_stream, "%s", str);
if(!ret) {
printf("file read error!\r\n");
} else if(ret == EOF) {
/* 读到文件末尾的话将文件指针重新调整到文件头 */
fseek(data_stream, 0, SEEK_SET);
}
fclose(data_stream); /* 关闭文件 */
return 0;
}
static int adc_read(struct adc_dev *dev){
int ret = 0;
char str[50];
SENSOR_FLOAT_DATA_GET(ret, IN_VOLTAGE_SCALE, str, scale);
SENSOR_INT_DATA_GET(ret, IN_VOLTAGE_RAW, str, raw);
/* 转换得到实际电压值mV */
dev->act = (dev->scale * dev->raw)/1000.f;
return ret;
}
int main(int argc, char *argv[]) {
int ret = 0;
if (argc != 1) {
printf("Error Usage!\r\n");
return -1;
}
while (1) {
ret = adc_read(&imx6ulladc);
if(ret == 0) { /* 数据读取成功 */
printf("ADC原始值:%d,电压值:%.3fV\r\n", imx6ulladc.raw, imx6ulladc.act);
}
usleep(100000); /*100ms */
}
return 0;
}
注意应用程序用到了浮点运算,因此:
arm-linux-gnueabihf-gcc -march=armv7-a -mfpu=neon -mfloat-abi=hard adcApp.c -o adcApp


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
· 【自荐】一款简洁、开源的在线白板工具 Drawnix
· 园子的第一款AI主题卫衣上架——"HELLO! HOW CAN I ASSIST YOU TODAY
· Docker 太简单,K8s 太复杂?w7panel 让容器管理更轻松!