

1 pwm子系统框架
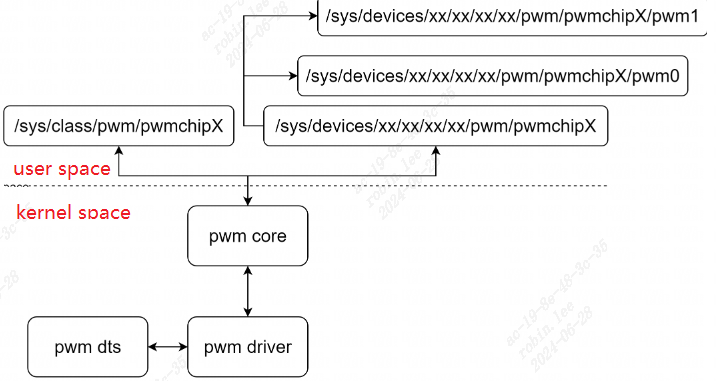
用户态:基于sysfs操作pwm
内核态分为:
pwm core:pwm_chip的添加删除,pwm_class类pwm_chip/pwm_device的sysfs创建。
pwm driver:pwm_chip对象实例,注册添加到pwm core。
pwm_chip可以包含一个或多个pwm_device,每个pwm_device通过设置不同pwm_state来达到目的。
1.1 源码结构
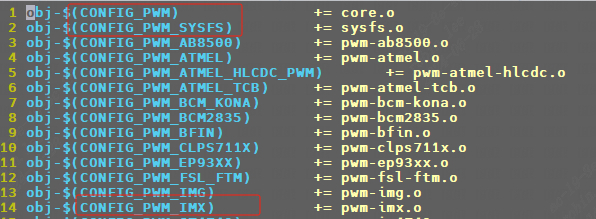
drivers/pwm/
core.c //pwm子系统核心。
sysfs.c//pwm子系统的pwm_class注册,pwm_chip属性,pwm_device属性等定义。
pwm-imx.c//imx的pwm_chip驱动。

我已经编译进vmlinux了,可以看到built-in.o。Makefile如下:
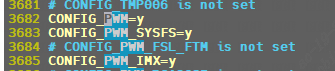
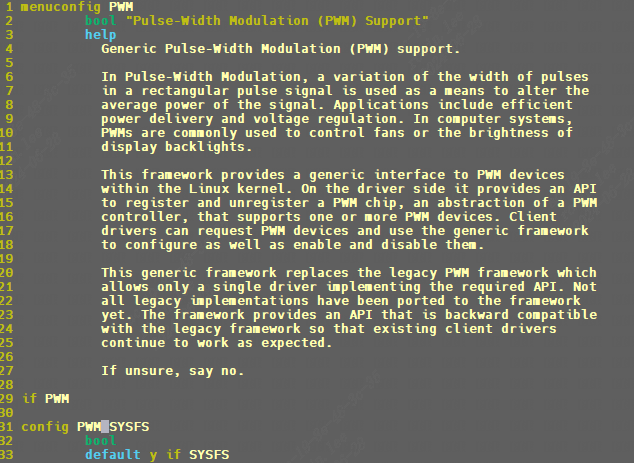
Kconfig如下,我的内核.config配置选中了PWM和PWM_IMX,因此编译进了内核镜像。
1.2 数据结构
1.2.1 pwm_chip
是对一个pwm控制器的抽象。
struct pwm_chip {
struct device *dev;
const struct pwm_ops *ops;
int base;
unsigned int npwm;//pwm控制器的pwm数量。
struct pwm_device * (*of_xlate)(struct pwm_chip *pc,
const struct of_phandle_args *args);
unsigned int of_pwm_n_cells;
/* only used internally by the PWM framework */
struct list_head list;
struct pwm_device *pwms;
}; //include/linux/pwm.h
1.2.2 pwm_ops
pwm控制器的操作接口。
struct pwm_ops {
int (*request)(struct pwm_chip *chip, //请求 PWM
struct pwm_device *pwm);
void (*free)(struct pwm_chip *chip, //释放 PWM
struct pwm_device *pwm);
int (*config)(struct pwm_chip *chip, //配置 PWM 周期和占空比
struct pwm_device *pwm,
int duty_ns, int period_ns);
int (*set_polarity)(struct pwm_chip *chip, //设置 PWM 极性
struct pwm_device *pwm,
enum pwm_polarity polarity);
int (*enable)(struct pwm_chip *chip, //使能 PWM
struct pwm_device *pwm);
void (*disable)(struct pwm_chip *chip, //关闭 PWM
struct pwm_device *pwm);
struct module *owner;
};
1.2.3 pwm_state
pwm_state就是控制占空比控制转速,亮度参数。
struct pwm_state {
unsigned int period; //pwm的周期,单位ns。
unsigned int duty_cycle; //占空比duty_cycle,单位ns。
enum pwm_polarity polarity;//PWM_POLARITY_NORMAL表示高电平持续duty_cycle,
//然后是低电平持续剩余时间。PWM_POLARITY_INVERSED表示低电平持续duty_cycle,然后是高电平持续剩余时间。
bool enabled; //是否使能
};
1.3 API
api声明见linux\include\linux\pwm.h,实现linux\drivers\pwm\core.c
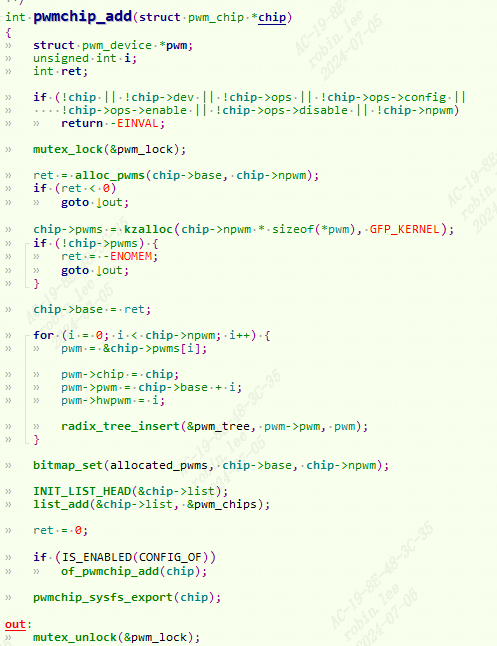
1.3.1 pwmchip_add
向pwm子系统注册一个pwm_chip。
int pwmchip_add(struct pwm_chip *chip);
pwmchip_add
pwmchip_add_with_polarity
->pwm_ops_check //检查pwm_ops是否支持apply等。
->alloc_pwms //为pwm_chip的pwm_device分配allocated_pwms。
->//初始化每个pwm_device,并加入pwm_tree。
->pwmchip_sysfs_export
->pwmchip_sysfs_export //创建pwm_class类设备pwmchpX,位于/sys/class/pwm/pwmchipX。
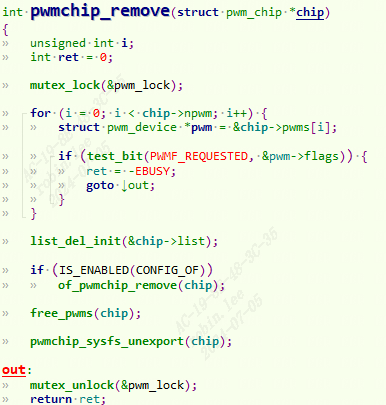
1.3.2 pwmchip_remove
int pwmchip_remove(struct pwm_chip *chip);
删除一个pwm_chip。
1.3.3 pwm_request
请求 PWM。
struct pwm_device *pwm_request(int pwm, const char *label)
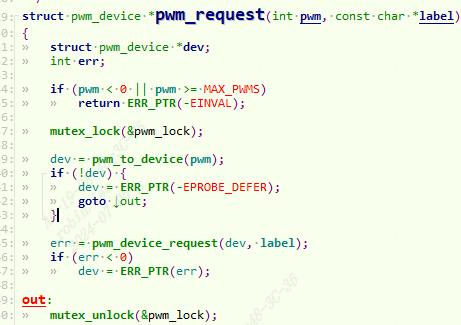
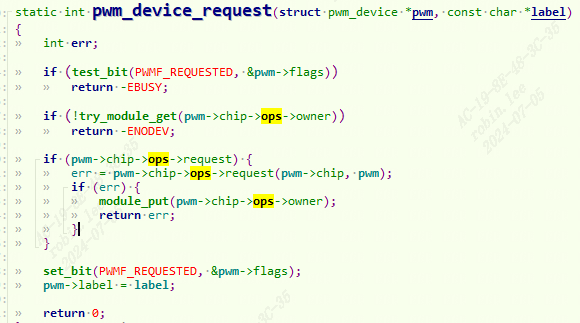
可以看到就是调用具体pwm示例的request函数。
1.3.4 pwm_free
释放 PWM。
void pwm_free(struct pwm_device *pwm)
1.3.5 pwm_config
配置 PWM 周期和占空比,操作具体pwm实例。
int pwm_config(struct pwm_device *pwm, int duty_ns, int period_ns)
1.3.6 pwm_set_polarity
设置 PWM 极性。
int pwm_set_polarity(struct pwm_device *pwm, enum pwm_polarity polarity)
1.3.6 pwm_enable
1.3.7 pwm_disable
从1.3.3到1.3.7本质都是调用pwm_ops。
2 pwm驱动实例
I.MX6ULL 有 8 路 PWM 控制器。这 8 路 PWM 都属于I.MX6ULL 的 AIPS-1域,但是在设备树imx6ull.dtsi中 分为了两部分,PWM1~PWM4 在一起,PWM5~PWM8 在一起。以pwm3为例:
2.1 dts描述
打开imx6ull.dtsi:可以看到pwm3的描述:
pwm3: pwm@02088000 {
compatible = "fsl,imx6ul-pwm", "fsl,imx27-pwm";
reg = <0x02088000 0x4000>;
interrupts = <GIC_SPI 85 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&clks IMX6UL_CLK_PWM3>,
<&clks IMX6UL_CLK_PWM3>;
clock-names = "ipg", "per";
#pwm-cells = <2>;
};
关 于I.MX6ULL的PWM dts节点描述参考对应的绑定文档 : Documentation/devicetree/bindings/pwm/ imx-pwm.txt
GPIO1_IO04 这里作为PWM3的输出引脚,所以我们需要在设备树里面添加 GPIO1_IO04 的引脚信息以及PWM3控制器对应的节点信息:
打开 imx6ull-alientek-emmc.dts, 添加iomux配置信息:
pinctrl_pwm3: pwm3grp {
fsl,pins = <MX6UL_PAD_GPIO1_IO04__PWM3_OUT 0x110b0>;
};
&pwm3 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_pwm3>;
status = "okay";
};
2.2 使能PWM驱动
从.config中已经使能了,但是为了学习, 我们还是需要知道怎么使能。
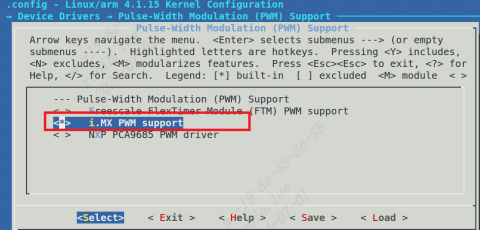
-> Device Drivers
-> Pulse-Width Modulation (PWM) Support
-> <*> i.MX PWM support
2.3 PWM 背光设置
linux 内核里面关于 backlight(背光)的绑定文档,路径为 Documentation/devicetree/bindings/video/backlight/pwm-backlight.txt,此文档描述了如何创建 backlight 节点来使用linux内核自带的pwm背光驱动。
compatible:内容必须为“pwm-backlight”,通过这个可以匹配到内核自带的 PWM 背光驱
动,驱动文件为 drivers/video/backlight/pwm_bl.c,这里就不去分析驱动源码了。
pwms:此属性指定背光使用哪一路 PWM,以及 PWM 相关的属性。
brightness-levels:背光等级数组,范围 0~255,对应占空比为 0%~100%。数组内的值必须
从 0 开始,也就是 0%占空比,最后一个值必须是 255,也就是 100%占空比。数组中间值的个
数以及值大小可以自行定义。
default-brightness-level:默认的背光等级,也就是 brightness-levels 属性中第几个值,注意
这里是数索引编号,不是具体的数值!
power-supply:支持的电压,此属性可以不需要
backlight {
compatible = "pwm-backlight";
pwms = <&pwm1 0 5000000>;// PWM 周期为 5000000ns,频率为 200Hz
brightness-levels = <0 4 8 16 32 64 128 255>;
default-brightness-level = <7>;
status = "okay";
};
2.4 驱动源码分析
2.4.1 probe过程
2.4.1.1 imx_chip
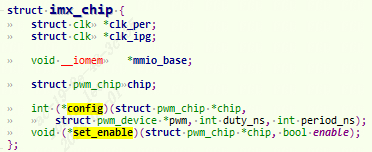
定义了imx_chip,包装了pwm_chip结构。
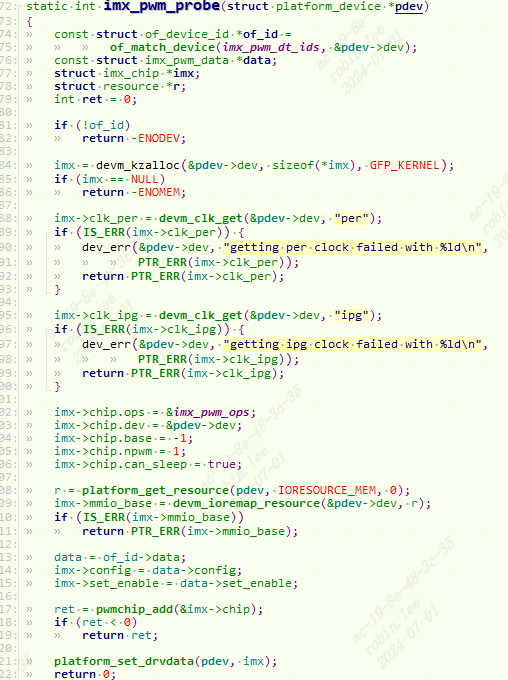
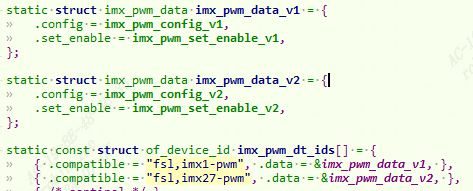
probe时,先分配内存,从dts获取per, ipg等时钟信息,设置pwm的ops为imx_pwm_ops。最后pwmchip_add注册进pwm子系统。注意这里有一个of_id->data,对应如下:可以看到有v1,v2两2版本,到时候会被ops中的函数调用。
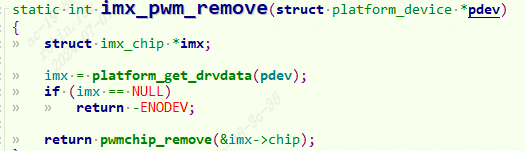
同理,驱动卸载最后调用pwmchip_remove注销pwm。
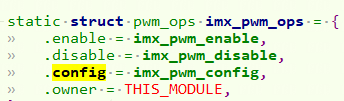
2.4.2 imx_pwm_ops
2.4.2.1 imx_pwm_config
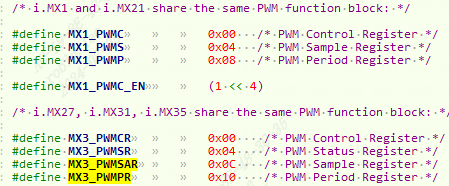
配置 PWM 周期和占空比。根据dts描述(”imx27-pwm“)我们使用的是v2。
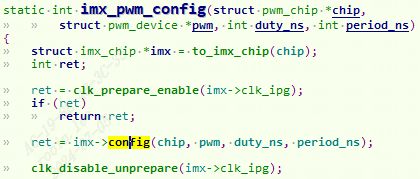
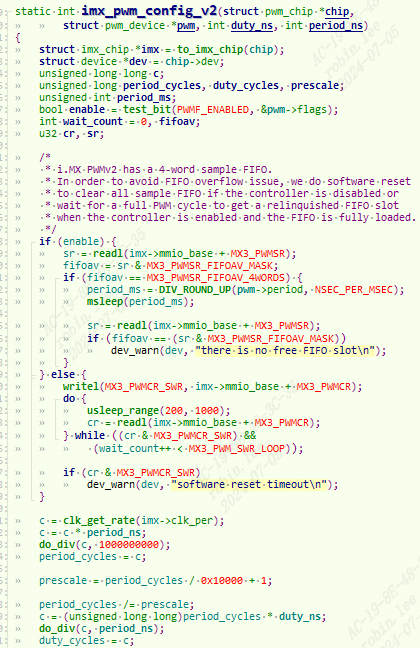
PWMv2会有4 word的采样fifo, 为了避免采样FIFO溢出,当pwm关闭时,对所有采样FIFO进行软件复位。当pwm使能后处于工作中,要等待完整的 PWM 周期以保证pwm空闲。
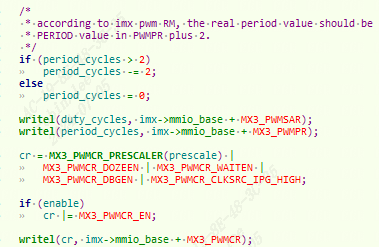
然后设置PWM 周期period_cycles,和占空比duty_cycles。
最后调用writel写入寄存器。
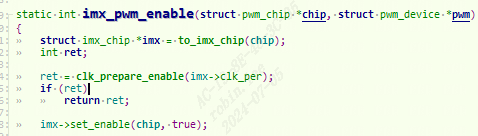
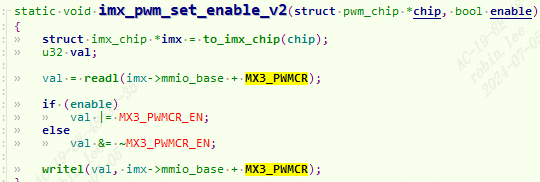
2.4.2.2 imx_pwm_enable
控制MX3_PWMCR寄存器,使能关闭开关。
2.4.2.3 imx_pwm_disable

3 基于pwm sysfs测试
alpha开发板 JP2 排针上的 GPIO_4(GPIO1_IO04)引脚连接到 示波器上。等下看pwm信号效果。
可以看到一共8 路 PWM 控制器:

我们使用的pwm3,对应出 pwmchip2, 导出chip2通道的0设备文件:
echo 0 > /sys/class/pwm/pwmchip2/export
执行完成会在pwmchip2 目录下生成一个名为“pwm0”的子目录:

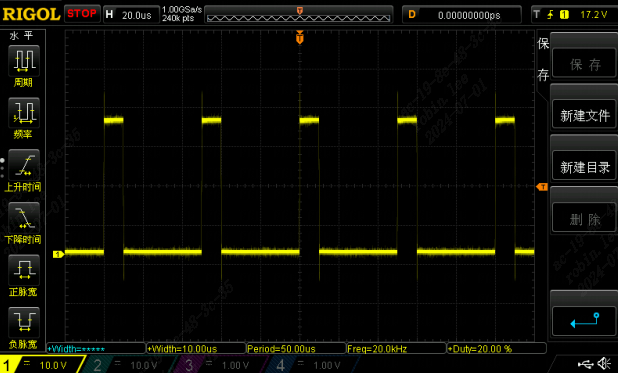
echo 1 > /sys/class/pwm/pwmchip2/pwm0/enable #使能pwm3
echo 50000 > /sys/class/pwm/pwmchip2/pwm0/period #设置周期值,单位为 ns,比如 20KHz 频率的周期就是 50000ns
echo 10000 > /sys/class/pwm/pwmchip2/pwm0/duty_cycle #20%占空比
总结:
导出chip1通道的0设备文件:echo 0 > /sys/class/pwm/pwmchip1/export
配置chip1通道0的周期: echo 10000000 > /sys/class/pwm/pwmchip1 /pwm0/period
配置chip1通道0的占空比:echo 4000000 >/sys/class/pwm/pwmchip1/pwm0/duty_cycle
配置片chip通道0使能: echo 1 > /sys/class/pwm/pwmchip1/pwm0/enable
配置片chip通道0禁能: echo 0 > /sys/class/pwm/pwmchip1/pwm0/enable
取消导出片chip通道0设备文件: echo 0 >/sys/class/pwm/pwmchip1/unexport


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· 阿里巴巴 QwQ-32B真的超越了 DeepSeek R-1吗?
· 如何调用 DeepSeek 的自然语言处理 API 接口并集成到在线客服系统
· 【译】Visual Studio 中新的强大生产力特性
· 2025年我用 Compose 写了一个 Todo App