
Linux下RTC子系统驱动
1 引入RTC
CPU内部有很多定时器,像看门狗WDT,PWM定时器,高精度定时器Timer等等, 只在“启动”即“通电时”运行,断电时停止。
当然,如果时钟不能连续跟踪时间,则必须手动设置。那么当关机后就没办法自动计数统计时间了。RTC 就很好的解决了这个问题,RTC是实时时钟,用于记录当前系统时间。
2 Linux 内核 RTC 驱动框架
RTC在linux内核态也是用一个字符设备驱动去实现的。Linux 内核将 RTC 设备抽象为rtc_device结构体,定义在 include/linux/rtc.h, 进入drivers/rtc子系统目录:
class.c:为底层驱动提供 register 与 unregister 接口用于 RTC 设备的注册/注销。初始化 RTC 设备结构、sysfs、proc
interface.c:提供用户程序与 RTC 的接口函数
dev.c:将 RTC 设备抽象为通用的字符设备,提供文件操作函数集
sysfs.c:管理 RTC 设备的 sysfs 属性,获取 RTC 设备名、日期、时间等
proc.c:管理 RTC 设备的 procfs 属性,提供中断状态和标志查询
lib.c:提供 RTC、Data 和 Time 之间的转换函数
rtc-xxx.c:各平台 RTC 设备的实际驱动
2.1 rtc子系统Makefile
rtc子系统Makefile如下, 可以根据配置宏去裁剪rtc子系统。
obj-$(CONFIG_RTC_LIB) += lib.o
obj-$(CONFIG_RTC_SYSTOHC) += systohc.o
obj-$(CONFIG_RTC_CLASS) += rtc-core.o
obj-$(CONFIG_RTC_MC146818_LIB) += rtc-mc146818-lib.o
rtc-core-y := class.o interface.o
rtc-core-$(CONFIG_RTC_NVMEM) += nvmem.o
rtc-core-$(CONFIG_RTC_INTF_DEV) += dev.o
rtc-core-$(CONFIG_RTC_INTF_PROC) += proc.o
rtc-core-$(CONFIG_RTC_INTF_SYSFS) += sysfs.o
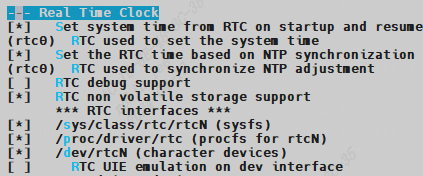
Linux默认rtc是开启的。
Device Drivers
->Real Time Clock
[]Set system time from RTC on startup and resume
[](rtc0) RTC used to set the system time
[]Set the RTC time based on NTP synchronization
[](rtc0) RTC used to synchronize NTP adjustment
[]RTC debug support
[]RTC non volatile storage support
[]/sys/class/rtc/rtcN (sysfs)
[]/proc/driver/rtc (procfs for rtcN)
[]/dev/rtcN (character devices)
2.2 rtc数据结构
2.2.1 rtc_device
struct rtc_device {
struct device dev;
struct module *owner;
int id; /* ID, 当前rtc设备在rtc子系统的子序号*/
char name[RTC_DEVICE_NAME_SIZE]; /* 名字 */
const struct rtc_class_ops *ops; /* RTC 设备底层操作函数 */
struct mutex ops_lock;
struct cdev char_dev; /* 字符设备 */
unsigned long flags;
unsigned long irq_data;
spinlock_t irq_lock;
wait_queue_head_t irq_queue;
struct fasync_struct *async_queue;
struct rtc_task *irq_task;
spinlock_t irq_task_lock;
int irq_freq;
int max_user_freq;
struct timerqueue_head timerqueue;
struct rtc_timer aie_timer;
struct rtc_timer uie_rtctimer;
struct hrtimer pie_timer; /* sub second exp, so needs hrtimer */
int pie_enabled;
struct work_struct irqwork;
/* Some hardware can't support UIE mode */
int uie_unsupported;
};
2.2.2 rtc_class_ops
struct rtc_class_ops {
int (*open)(struct device *);
void (*release)(struct device *);
int (*ioctl)(struct device *, unsigned int, unsigned long);
int (*read_time)(struct device *, struct rtc_time *);
int (*set_time)(struct device *, struct rtc_time *);
int (*read_alarm)(struct device *, struct rtc_wkalrm *);
int (*set_alarm)(struct device *, struct rtc_wkalrm *);
int (*proc)(struct device *, struct seq_file *);
int (*set_mmss64)(struct device *, time64_t secs);
int (*set_mmss)(struct device *, unsigned long secs);
int (*read_callback)(struct device *, int data);
int (*alarm_irq_enable)(struct device *, unsigned int enabled);
};
rtc_class_ops 为 RTC 设备的最底层操作函数集合,包括从 RTC 设备中读取时间、向 RTC 设备写入新的时间值等,对接RTC硬件控制器,不直接对接应用。
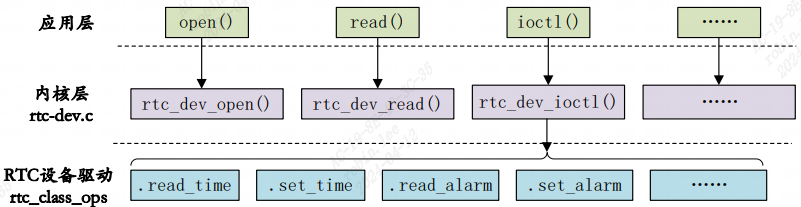
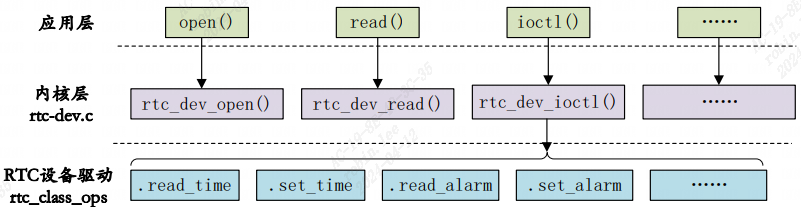
2.2.3 rtc_dev_fops
Linux 内核提供了一个 RTC 通用字符设备驱动文件,文件名为 drivers/rtc/rtc-dev.c,r该文件提供了所有 RTC 设备共用的 file_operations 函数操作集,对接应用ioctl。
static const struct file_operations rtc_dev_fops = {
.owner = THIS_MODULE,
.llseek = no_llseek,
.read = rtc_dev_read,
.poll = rtc_dev_poll,
.unlocked_ioctl = rtc_dev_ioctl,
.open = rtc_dev_open,
.release = rtc_dev_release,
.fasync = rtc_dev_fasync,
};
//调用关系:以RTC_RD_TIME为例
rtc_dev_ioctl
->rtc_read_time
->rtc->ops->read_time(rtc->dev.parent, tm);
//可以看出,rtc_read_time 函数最终会调用 rtc_class_ops 中的.read_time 来从 RTC 设备中获取当前时间
rtc_dev_ioctl 函数对其他的命令处理都是类似的,比 如 RTC_ALM_READ 命令会通过rtc_read_alarm函数获取到闹钟值,而 rtc_read_alarm 函数经过层层调用,最终会调用rtc_class_ops中的 read_alarm 函数来获取闹钟值。上下调用关系如下:
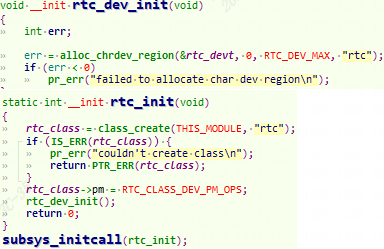
2.3 rtc子系统初始化
rtc子系统初始化,主要分配rtc_class类,以及rtc设备的rtc_devt为设备号:
rtc_init
->class_create--创建rtc_class类。 ->rtc_dev_init ->alloc_chrdev_region--为rtc设备分配子设备号范围0~15。主设备号随机分配。最终结果放入rtc_devt。
系统启动时会将RTC时间设置到系统时间:
rtc_hctosys
->rtc_read_time
->rtc_tm_to_time64
->do_settimeofday64
2.4 rtc设备操作API
对rtc设备的操作主要有:alarm读取和设置、rtc time读取和设置、中断配置, 对应drivers\rtc\interface.c,头文件对应include/linux/rtc.h。
extern int rtc_read_time(struct rtc_device *rtc, struct rtc_time *tm);
extern int rtc_set_time(struct rtc_device *rtc, struct rtc_time *tm);
extern int rtc_set_ntp_time(struct timespec64 now, unsigned long *target_nsec);
int __rtc_read_alarm(struct rtc_device *rtc, struct rtc_wkalrm *alarm);
extern int rtc_read_alarm(struct rtc_device *rtc,struct rtc_wkalrm *alrm);
extern int rtc_set_alarm(struct rtc_device *rtc,struct rtc_wkalrm *alrm);
extern int rtc_initialize_alarm(struct rtc_device *rtc,struct rtc_wkalrm *alrm);
extern void rtc_update_irq(struct rtc_device *rtc,
unsigned long num, unsigned long events);extern int rtc_irq_set_state(struct rtc_device *rtc, int enabled);
extern int rtc_irq_set_freq(struct rtc_device *rtc, int freq);
extern int rtc_update_irq_enable(struct rtc_device *rtc, unsigned int enabled);
extern int rtc_alarm_irq_enable(struct rtc_device *rtc, unsigned int enabled);
2.5 注册RTC设备
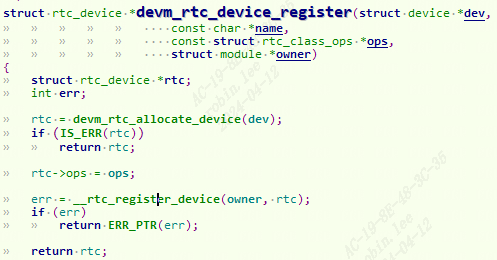
devm_rtc_device_register或者rtc_register_device注册rtc设备到rtc子系统。
struct rtc_device *devm_rtc_device_register(struct device *dev,
const char *name,
const struct rtc_class_ops *ops,
struct module *owner);
int __rtc_register_device(struct module *owner, struct rtc_device *rtc);
void rtc_device_unregister(struct rtc_device *rtc);
3 RTC驱动实例
以nxp的imx6ull芯片为例,打开imx6ull.dtsi,找到snvs_rtc设备节点。
3.1 设备树节点
snvs_rtc: snvs-rtc-lp {
compatible = "fsl,sec-v4.0-mon-rtc-lp";
regmap = <&snvs>;
offset = <0x34>;
interrupts = <GIC_SPI 19 IRQ_TYPE_LEVEL_HIGH>, <GIC_SPI 20 IRQ_TYPE_LEVEL_HIGH>;
};
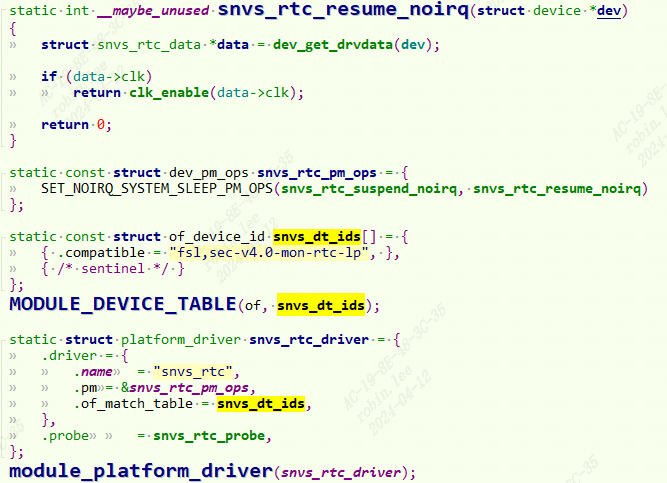
对应驱动文件 drivers/rtc/rtc-snvs.c。
3.2 驱动probe
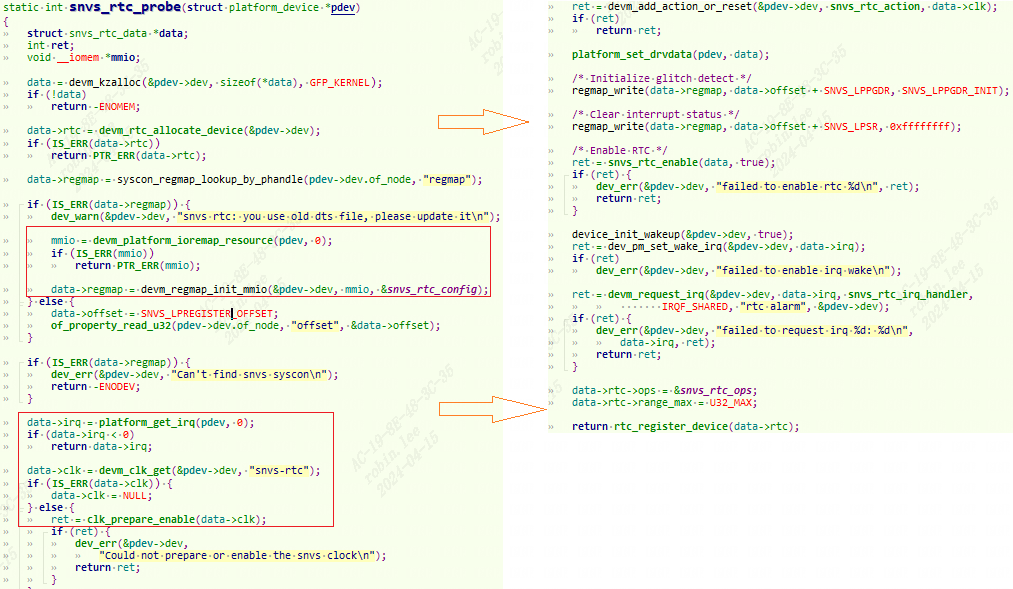
3.2.1 snvs_rtc_probe
-
Linux3.1 引入了一个全新的 regmap 机制(Linux下regmap模型驱动 - fuzidage - 博客园 (cnblogs.com)),
devm_regmap_init_mmio。regmap 用于提供一套方便的 API 函 数去操作底层硬件寄存器,以提高代码的可重用性。snvs-rtc.c文件会采用regmap 机制来读写 RTC 底层硬件寄存器。这里使用devm_regmap_init_mmio函数将 RTC 的硬件寄存器转化为 regmap 形式,这样 regmap 机制的regmap_write、regmap_read等 API 函数才能操作寄存器。 -
获取中断号,时钟,使能时钟。
-
设置
RTC_ LPPGDR寄存器值为SNVS_LPPGDR_INIT= 0x41736166,这里就是用的 regmap 机制的regmap_write函数完成对寄存器进行写操作。 -
RTC_LPSR寄存器,写入0xffffffff,LPSR是RTC 状态寄存器,写 1 清零, 因此这一步就是清除LPSR寄存器。 -
调用
snvs_rtc_enable函数使能 RTC,此函数会设置RTC_LPCR寄存器。 -
devm_request_irq函数请求RTC中断,中断服务函数为snvs_rtc_irq_handler, 用于 RTC 闹钟中断。 -
设置
rtc_class_ops,并且调用rtc_register_device注册rtc子系统。
3.2.2 rtc_class_ops实例
static const struct rtc_class_ops snvs_rtc_ops = {
.read_time = snvs_rtc_read_time,
.set_time = snvs_rtc_set_time,
.read_alarm = snvs_rtc_read_alarm,
.set_alarm = snvs_rtc_set_alarm,
.alarm_irq_enable = snvs_rtc_alarm_irq_enable,
};
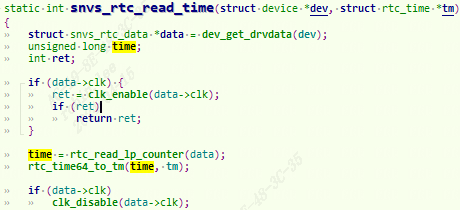
3.2.2.1 snvs_rtc_read_time
获取rtc时间的细节详见 IMX6ULL裸机-RTC定时器。
SNVS_SRTCMR[14:0]代表SRTC计数器的高15位
SNVS_SRTCLR[31:15]代表SRTC计数器的低17位
注意:是以 1970 年 1 月 1 日0点0分0秒为起点,加上经过的总秒数即可得到现在的时间点。
SNVS_HPCOMR[31], NPSWA_EN位,非特权软件访问控制位,如果非特权软件要访问 SNVS 的话此位必须为 1。
SNVS_LPCR[0], SRTC_ENV位,使能 RTC 计数器。
#define SNVS_LPREGISTER_OFFSET 0x34
/* These register offsets are relative to LP (Low Power) range */
#define SNVS_LPCR 0x04
#define SNVS_LPSR 0x18
#define SNVS_LPSRTCMR 0x1c
#define SNVS_LPSRTCLR 0x20
#define SNVS_LPTAR 0x24
#define SNVS_LPPGDR 0x30
#define SNVS_LPCR_SRTC_ENV (1 << 0)
#define SNVS_LPCR_LPTA_EN (1 << 1)
#define SNVS_LPCR_LPWUI_EN (1 << 3)
#define SNVS_LPSR_LPTA (1 << 0)
#define SNVS_LPPGDR_INIT 0x41736166
#define CNTR_TO_SECS_SH 15
static int snvs_rtc_read_time(struct device *dev, struct rtc_time *tm){
struct snvs_rtc_data *data = dev_get_drvdata(dev);
unsigned long time;
int ret;
if (data->clk) {
ret = clk_enable(data->clk);
if (ret)
return ret;
}
time = rtc_read_lp_counter(data);
rtc_time64_to_tm(time, tm);
if (data->clk)
clk_disable(data->clk);
return 0;
}
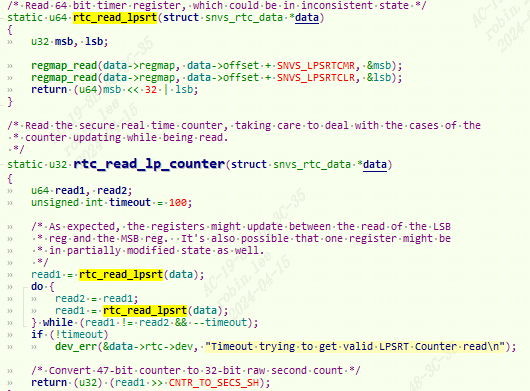
/* Read 64 bit timer register, which could be in inconsistent state */
static u64 rtc_read_lpsrt(struct snvs_rtc_data *data){
u32 msb, lsb;
regmap_read(data->regmap, data->offset + SNVS_LPSRTCMR, &msb);
regmap_read(data->regmap, data->offset + SNVS_LPSRTCLR, &lsb);
return (u64)msb << 32 | lsb;
}
/* Read the secure real time counter, taking care to deal with the cases of the
* counter updating while being read.
*/
static u32 rtc_read_lp_counter(struct snvs_rtc_data *data){
u64 read1, read2;
unsigned int timeout = 100;
/* As expected, the registers might update between the read of the LSB
* reg and the MSB reg. It's also possible that one register might be
* in partially modified state as well.
*/
read1 = rtc_read_lpsrt(data);
do {
read2 = read1;
read1 = rtc_read_lpsrt(data);
} while (read1 != read2 && --timeout);
if (!timeout)
dev_err(&data->rtc->dev, "Timeout trying to get valid LPSRT Counter read\n");
/* Convert 47-bit counter to 32-bit raw second count */
return (u32) (read1 >> CNTR_TO_SECS_SH);
}
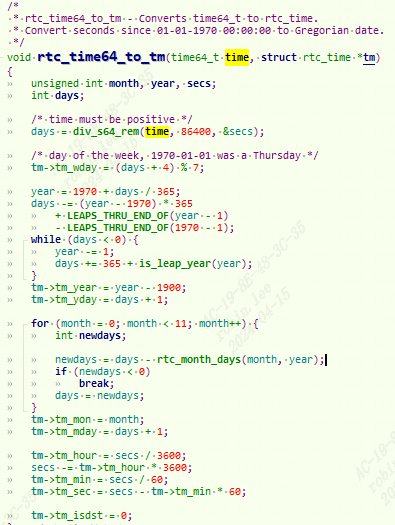
void rtc_time64_to_tm(time64_t time, struct rtc_time *tm) {
unsigned int month, year, secs;
int days;
/* time must be positive */
days = div_s64_rem(time, 86400, &secs);
/* day of the week, 1970-01-01 was a Thursday */
tm->tm_wday = (days + 4) % 7;
year = 1970 + days / 365;
days -= (year - 1970) * 365
+ LEAPS_THRU_END_OF(year - 1)
- LEAPS_THRU_END_OF(1970 - 1);
while (days < 0) {
year -= 1;
days += 365 + is_leap_year(year);
}
tm->tm_year = year - 1900;
tm->tm_yday = days + 1;
for (month = 0; month < 11; month++) {
int newdays;
newdays = days - rtc_month_days(month, year);
if (newdays < 0)
break;
days = newdays;
}
tm->tm_mon = month;
tm->tm_mday = days + 1;
tm->tm_hour = secs / 3600;
secs -= tm->tm_hour * 3600;
tm->tm_min = secs / 60;
tm->tm_sec = secs - tm->tm_min * 60;
tm->tm_isdst = 0;
}
rtc_read_lpsrt函数RTC定时器寄存器,得到64位原始数据。让后将其转换成按秒计算单位。可以看到就是设置读取RTC寄存器信息。- 调用
drivers\rtc\lib.c的rtc_time64_to_tm将秒数转换成rtc_time, 也就是年月日单位。
3.2.2.2 snvs_rtc_set_time
设置时钟,和snvs_rtc_read_time同理,也是寄存器操作,就不展开细节分析。
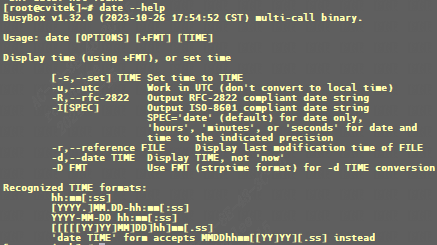
3.3 应用测试
3.3.1 读取rtc时间
[root@imx6ull]~# date
Thu Jan 1 08:00:13 CST 1970
3.3.2 设置rtc时间
现在我要设置当前时间为 2023 年 8 月 31 日 18:13:00。
date -s "2023-08-31 18:13:00"
[root@imx6ull]~# date -s "2023-08-31 18:13:00"
Thu Aug 31 18:13:00 CST 2023
注意我们使用“date -s”命令仅仅是将当前系统时间设置了,此时间还没有写入到RTC 芯片里面,因此系统重启以后时间又会丢失。我们需要将 当前的时间写入到 RTC 里面,这里要用到 hwclock 命令,输入如下命令将系统时间写入到 RTC 里面:
hwclock -w

 浙公网安备 33010602011771号
浙公网安备 33010602011771号