

1 引入Framebuffer
s3c2440裸机编程-LDC | Hexo (fuzidage.github.io)
介绍了LDC的基本原理。裸机 LCD 驱动编写流程如下:
- 初始化 I.MX6U 的 eLCDIF 控制器,屏幕宽(width)、高(height)、
hspw、 hbp、hfp、vspw、vbp 和 vfp等信息。 - 初始化 LCD 像素时钟。
- 设置 RGBLCD 显存属性。
- 应用程序直接通过操作显存来操作 LCD,实现在 LCD 上显示字符、图片等信息。
同理linux系统下也是希望应用程序来直接操作一块内存来实现实现在 LCD 上显示字符、图片等信息,Framebuffer就是用来干这件事的。Framebuffer 翻译过来就是帧缓冲,简称 fb。
作用:把显示设备描述成一个缓冲区,允许应用程序通过帧缓冲定义好的接口访问这些图形设备,从而不用关心具体的硬件细节。
因此需要在底层framebuffer框架去对接具体的显示设备,显示设备控制器。
2 Framebuffer驱动介绍
2.1 Framebuffer设备节点
当我们编写好 LCD 驱动以后会生成一个名为/dev/fbX(X=0~n)的设备,应用程序通 过访问/dev/fbX 这个设备就可以访问 LCD。

2.2 Framebuffer框架
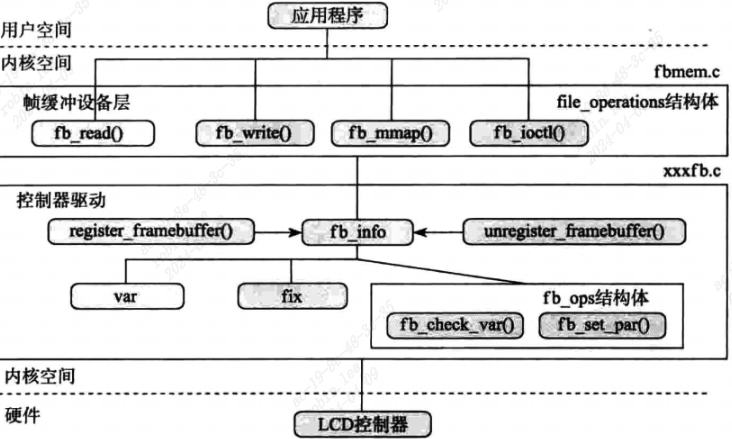
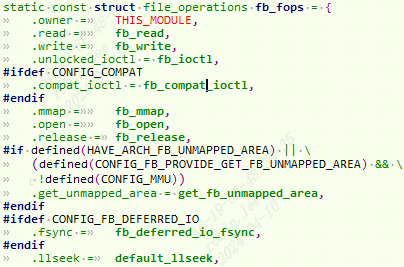
drivers/video/fbmem.c:主要任务是创建graphics类、注册FB的字符设备驱动(主设备号是29)、提供register_framebuffer接口给具体framebuffer驱动编写着来注册fb设备的。
#define FB_MAJOR 29 /* /dev/fb* framebuffers */
-
drivers/video/fbsys.c:是fbmem.c引出来的,处理fb在/sys/class/graphics/fb0目录下的一些属性文件的。 -
xxx_fb.c: 具体的显示设备控制器驱动代码,dts描述对应的显示设备,控制器去驱动显示设备。
2.3 Framebuffer数据结构
2.3.1 fb_info
fb_info结构体记录了帧缓冲设备的全部信息,包括设备的设置参数、状态以及操作函数指针,对于每一个帧缓冲设备都必须对应一个fb_info结构体实例。
struct fb_info {
atomic_t count;
int node;
int flags;
struct mutex lock; /* 互斥锁 */
struct mutex mm_lock; /* 互斥锁,用于 fb_mmap 和 smem_*域*/
struct fb_var_screeninfo var; /* 当前可变参数 */
struct fb_fix_screeninfo fix; /* 当前固定参数 */
struct fb_monspecs monspecs; /* 当前显示器特性 */
struct work_struct queue; /* 帧缓冲事件队列 */
struct fb_pixmap pixmap; /* 图像硬件映射 */
struct fb_pixmap sprite; /* 光标硬件映射 */
struct fb_cmap cmap; /* 当前调色板 */
struct list_head modelist; /* 当前模式列表 */
struct fb_videomode *mode; /* 当前视频模式 */
#ifdef CONFIG_FB_BACKLIGHT /* 如果 LCD 支持背光的话 */
/* assigned backlight device */
/* set before framebuffer registration,
remove after unregister */
struct backlight_device *bl_dev; /* 背光设备 */
/* Backlight level curve */
struct mutex bl_curve_mutex;
u8 bl_curve[FB_BACKLIGHT_LEVELS];
#endif
...
struct fb_ops *fbops; /* 帧缓冲操作函数集 */
struct device *device; /* 父设备 */
struct device *dev; /* 当前 fb 设备 */
int class_flag; /* 私有 sysfs 标志 */
...
char __iomem *screen_base; /* 虚拟内存基地址(屏幕显存) */
unsigned long screen_size; /* 虚拟内存大小(屏幕显存大小) */
void *pseudo_palette; /* 伪 16 位调色板 */
};
2.3.1.1 fb_ops
帧缓冲操作函数集,包含open,release,read,write等操作函数。
/*
* Frame buffer operations
*
* LOCKING NOTE: those functions must _ALL_ be called with the console
* semaphore held, this is the only suitable locking mechanism we have
* in 2.6. Some may be called at interrupt time at this point though.
*
* The exception to this is the debug related hooks. Putting the fb
* into a debug state (e.g. flipping to the kernel console) and restoring
* it must be done in a lock-free manner, so low level drivers should
* keep track of the initial console (if applicable) and may need to
* perform direct, unlocked hardware writes in these hooks.
*/
struct fb_ops {
/* open/release and usage marking */
struct module *owner;
int (*fb_open)(struct fb_info *info, int user);
int (*fb_release)(struct fb_info *info, int user);
/* For framebuffers with strange non linear layouts or that do not
* work with normal memory mapped access
*/
ssize_t (*fb_read)(struct fb_info *info, char __user *buf,
size_t count, loff_t *ppos);
ssize_t (*fb_write)(struct fb_info *info, const char __user *buf,
size_t count, loff_t *ppos);
/* checks var and eventually tweaks it to something supported,
* DO NOT MODIFY PAR */
int (*fb_check_var)(struct fb_var_screeninfo *var, struct fb_info *info);
/* set the video mode according to info->var */
int (*fb_set_par)(struct fb_info *info);
/* set color register */
int (*fb_setcolreg)(unsigned regno, unsigned red, unsigned green,
unsigned blue, unsigned transp, struct fb_info *info);
/* set color registers in batch */
int (*fb_setcmap)(struct fb_cmap *cmap, struct fb_info *info);
/* blank display */
int (*fb_blank)(int blank, struct fb_info *info);
/* pan display */
int (*fb_pan_display)(struct fb_var_screeninfo *var, struct fb_info *info);
/* Draws a rectangle */
void (*fb_fillrect) (struct fb_info *info, const struct fb_fillrect *rect);
/* Copy data from area to another */
void (*fb_copyarea) (struct fb_info *info, const struct fb_copyarea *region);
/* Draws a image to the display */
void (*fb_imageblit) (struct fb_info *info, const struct fb_image *image);
/* Draws cursor */
int (*fb_cursor) (struct fb_info *info, struct fb_cursor *cursor);
/* wait for blit idle, optional */
int (*fb_sync)(struct fb_info *info);
/* perform fb specific ioctl (optional) */
int (*fb_ioctl)(struct fb_info *info, unsigned int cmd,
unsigned long arg);
/* Handle 32bit compat ioctl (optional) */
int (*fb_compat_ioctl)(struct fb_info *info, unsigned cmd,
unsigned long arg);
/* perform fb specific mmap */
int (*fb_mmap)(struct fb_info *info, struct vm_area_struct *vma);
/* get capability given var */
void (*fb_get_caps)(struct fb_info *info, struct fb_blit_caps *caps,
struct fb_var_screeninfo *var);
/* teardown any resources to do with this framebuffer */
void (*fb_destroy)(struct fb_info *info);
/* called at KDB enter and leave time to prepare the console */
int (*fb_debug_enter)(struct fb_info *info);
int (*fb_debug_leave)(struct fb_info *info);
};
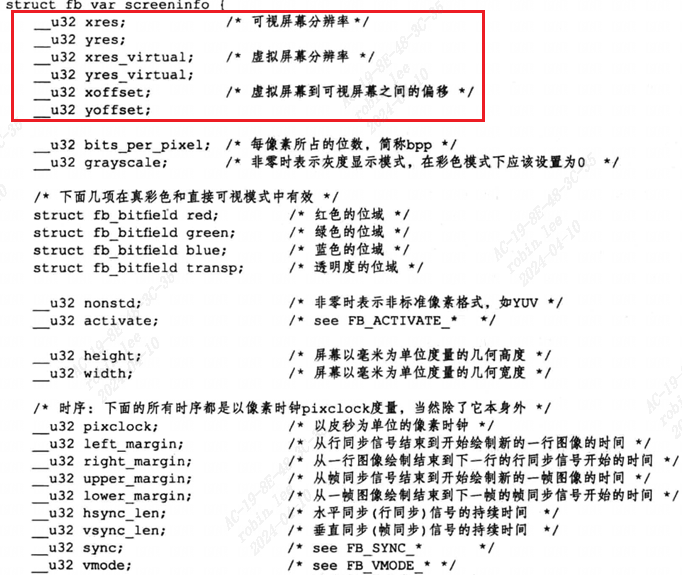
2.3.1.2 fb_var_screeninfo
记录用户可修改的显示控制器参数,包括了屏幕的分辨率和每个像素点的比特数bpp,pixclock等。
struct fb_var_screeninfo {
__u32 xres; /* visible resolution */
__u32 yres;
__u32 xres_virtual; /* virtual resolution */
__u32 yres_virtual;
__u32 xoffset; /* offset from virtual to visible */
__u32 yoffset; /* resolution */
__u32 bits_per_pixel; /* guess what */
__u32 grayscale; /* 0 = color, 1 = grayscale, */
/* >1 = FOURCC */
struct fb_bitfield red; /* bitfield in fb mem if true color, */
struct fb_bitfield green; /* else only length is significant */
struct fb_bitfield blue;
struct fb_bitfield transp; /* transparency */
__u32 nonstd; /* != 0 Non standard pixel format */
__u32 activate; /* see FB_ACTIVATE_* */
__u32 height; /* height of picture in mm */
__u32 width; /* width of picture in mm */
__u32 accel_flags; /* (OBSOLETE) see fb_info.flags */
/* Timing: All values in pixclocks, except pixclock (of course) */
__u32 pixclock; /* pixel clock in ps (pico seconds) */
__u32 left_margin; /* time from sync to picture */
__u32 right_margin; /* time from picture to sync */
__u32 upper_margin; /* time from sync to picture */
__u32 lower_margin;
__u32 hsync_len; /* length of horizontal sync */
__u32 vsync_len; /* length of vertical sync */
__u32 sync; /* see FB_SYNC_* */
__u32 vmode; /* see FB_VMODE_* */
__u32 rotate; /* angle we rotate counter clockwise */
__u32 colorspace; /* colorspace for FOURCC-based modes */
__u32 reserved[4]; /* Reserved for future compatibility */
};
2.3.1.2.1 引入可视屏幕和虚拟屏幕
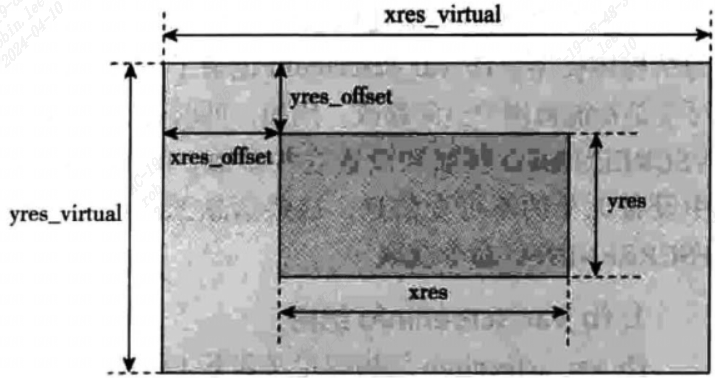
(1)可视屏幕:LCD分辨率,这是硬件相关的。比如:LCD屏幕的分辨率是800x480,那可视屏幕的最大分辨率就是800x480;
(2)虚拟屏幕:我们在内核中开辟的帧缓冲区的大小。比如:屏幕分辨率是800x480,但是我们可以将帧缓冲区开辟成1920x1080,在刷新屏幕时可以直接将1080p的图像一次性刷新到帧缓冲区中;
(3)虚拟屏到可视屏的偏移量:虚拟屏大小是超过可视屏幕的大小,偏移量决定了可视屏显示虚拟屏的哪一个部分;
(4)总结:通过改变虚拟屏到可视屏的偏移量,可以将虚拟屏的不同部分图像显示到可视屏中,而不需要每次都刷新帧缓冲区;
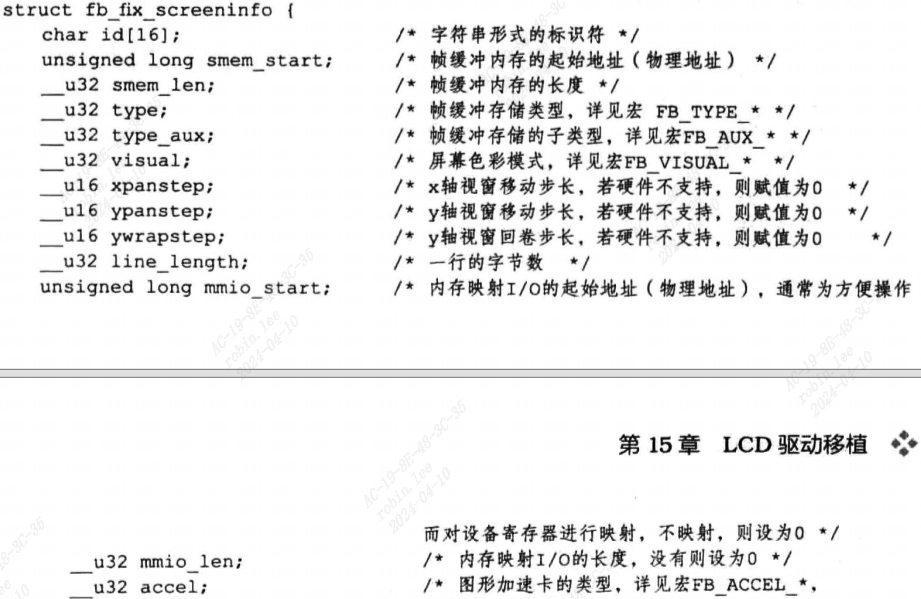
2.3.1.3 fb_fix_screeninfo
记录了用户不能修改的显示控制器的参数,比如说屏幕缓冲区的物理地址、长度。
struct fb_fix_screeninfo {
char id[16]; /* identification string eg "TT Builtin" */
unsigned long smem_start; /* Start of frame buffer mem */
/* (physical address) */
__u32 smem_len; /* Length of frame buffer mem */
__u32 type; /* see FB_TYPE_* */
__u32 type_aux; /* Interleave for interleaved Planes */
__u32 visual; /* see FB_VISUAL_* */
__u16 xpanstep; /* zero if no hardware panning */
__u16 ypanstep; /* zero if no hardware panning */
__u16 ywrapstep; /* zero if no hardware ywrap */
__u32 line_length; /* length of a line in bytes */
unsigned long mmio_start; /* Start of Memory Mapped I/O */
/* (physical address) */
__u32 mmio_len; /* Length of Memory Mapped I/O */
__u32 accel; /* Indicate to driver which */
/* specific chip/card we have */
__u16 capabilities; /* see FB_CAP_* */
__u16 reserved[2]; /* Reserved for future compatibility */
};
2.3.1.4 fb_bitfield
描述每一像素缓冲区的组织方式,包括域偏移、位域长度和MSB指示。
struct fb_bitfield {
__u32 offset; /* beginning of bitfield */
__u32 length; /* length of bitfield */
__u32 msb_right; /* != 0 : Most significant bit is */
/* right */
};
2.4 Framebuffer源码分析
2.4.1 编写fb驱动大致流程
- 构建fb_info结构体
register_framebuffer注册fb_info到fb框架中,驱动框架会自动创建/dev/fbx设备节点- app通过open、ioctl等函数接口去操作设备节点
/dev/fb0,驱动框架就会调用fb_info实例化中对应的open、ioctl接口去完成具体的硬件操作。
2.4.2 fb子系统注册卸载
如果定义了MODULE宏就表示要fb子系统单独编译成ko文件,否则用subsys_initcall编译进内核。入口在drivers\video\fbdev\core\fbmem.c
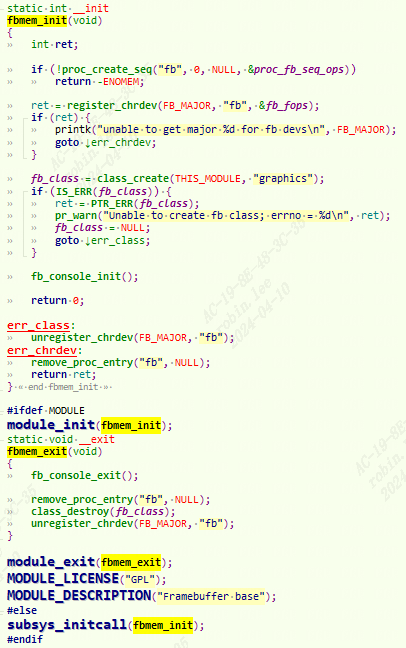
-
创建proc条目
/proc/fb -
注册成字符设备,fb主设备号定义在
include\uapi\linux\major.h#define FB_MAJOR 29 /* /dev/fb* framebuffers */ -
建立
graphics类。
2.4.2.1 fb注册卸载相关函数
2.4.2.1.1 framebuffer_alloc
struct fb_info *framebuffer_alloc(size_t size, struct device *dev)
{
//计算私有数据起始地址需要补齐的字节数
#define BYTES_PER_LONG (BITS_PER_LONG/8)
#define PADDING (BYTES_PER_LONG - (sizeof(struct fb_info) % BYTES_PER_LONG))
int fb_info_size = sizeof(struct fb_info);
struct fb_info *info;
char *p;
if (size)
fb_info_size += PADDING;
//申请内存
p = kzalloc(fb_info_size + size, GFP_KERNEL);
if (!p)
return NULL;
info = (struct fb_info *) p;
//将申请的私有数据的地址赋值给info->par
if (size)
info->par = p + fb_info_size;
//设备的父节点
info->device = dev;
#ifdef CONFIG_FB_BACKLIGHT
mutex_init(&info->bl_curve_mutex);
#endif
return info;
#undef PADDING
#undef BYTES_PER_LONG
}
(1)famebuffer_alloc函数是用来申请一个struct fb_info结构体的,传参的size是设备私有数据的大小;
(2)申请sizeof(struct fb_info) + PADDING + size大小的空间分配给fb_info结构体类型的指针info,加上PADDING 字节是为了后面的设备私有数据保持BYTES_PER_LONG字节对齐;
(3)将fb_info结构体后面size大小且BYTES_PER_LONG 字节的设备私有数据地址赋值info->par;
(4)将传入的参数dev赋值给info->device,作为父设备;
(5)返回创建好的struct fb_into结构体指针info;
2.4.2.1.2 register_framebuffer
int register_framebuffer(struct fb_info *fb_info) {
int i;
struct fb_event event;
struct fb_videomode mode;
//检查已经注册的帧缓冲设备是否已经达到上限
if (num_registered_fb == FB_MAX)
return -ENXIO;
//判断 fb_ info->flags 标志中关于控制器大小端的设置是否正确
if (fb_check_foreignness(fb_info))
return -ENOSYS;
//在registered_fb数组中找一个空闲的变量
num_registered_fb++;
for (i = 0 ; i < FB_MAX; i++)
if (!registered_fb[i])
break;
//将申请到的变量在数组中的下标赋值给fb_info->node
fb_info->node = i;
mutex_init(&fb_info->lock);
mutex_init(&fb_info->mm_lock);
//创建帧缓冲设备
fb_info->dev = device_create(fb_class, fb_info->device,
MKDEV(FB_MAJOR, i), NULL, "fb%d", i);
if (IS_ERR(fb_info->dev)) {
printk(KERN_WARNING "Unable to create device for framebuffer %d; errno = %ld\n", i, PTR_ERR(fb_info->dev));
fb_info->dev = NULL;
} else
//初始化帧缓冲设备,创建更多设备属性文件
fb_init_device(fb_info);
//初始化fb_info->pixmap,该变量的作用是将用于显示的硬件无关数据转换为设备需要的格式
if (fb_info->pixmap.addr == NULL) {
fb_info->pixmap.addr = kmalloc(FBPIXMAPSIZE, GFP_KERNEL);
if (fb_info->pixmap.addr) {
fb_info->pixmap.size = FBPIXMAPSIZE;
fb_info->pixmap.buf_align = 1;
fb_info->pixmap.scan_align = 1;
fb_info->pixmap.access_align = 32;
fb_info->pixmap.flags = FB_PIXMAP_DEFAULT;
}
}
fb_info->pixmap.offset = 0;
if (!fb_info->pixmap.blit_x)
fb_info->pixmap.blit_x = ~(u32)0;
if (!fb_info->pixmap.blit_y)
fb_info->pixmap.blit_y = ~(u32)0;
//初始化显示模式链表 fb_ info->modelist
if (!fb_info->modelist.prev || !fb_info->modelist.next)
INIT_LIST_HEAD(&fb_info->modelist);
//根据fb_info->var设置一个 mode
fb_var_to_videomode(&mode, &fb_info->var);
//将该mode添加到fb_info->modelist中
fb_add_videomode(&mode, &fb_info->modelist);
//将fb_info注册到registered_fb结构体中
registered_fb[i] = fb_info;
event.info = fb_info;
if (!lock_fb_info(fb_info))
return -ENODEV;
//〕通知发生了FB_EVENT_FB_REGISTERED事件(帧缓冲设备注册事件)
fb_notifier_call_chain(FB_EVENT_FB_REGISTERED, &event);
unlock_fb_info(fb_info);
return 0;
}
2.4.2.1.3 unregister_framebuffer
int unregister_framebuffer(struct fb_info *fb_info) {
struct fb_event event;
int i, ret = 0;
//检查传入的fb_info是否已经注册过
i = fb_info->node;
if (!registered_fb[i]) {
ret = -EINVAL;
goto done;
}
if (!lock_fb_info(fb_info))
return -ENODEV;
event.info = fb_info;
//通知发生FB_EVENT_FB_UNBIND事件,绑定了该帧缓冲设备的都解绑
ret = fb_notifier_call_chain(FB_EVENT_FB_UNBIND, &event);
unlock_fb_info(fb_info);
if (ret) {
ret = -EINVAL;
goto done;
}
//释放掉申请的fb_info->pixmap.addr
if (fb_info->pixmap.addr &&
(fb_info->pixmap.flags & FB_PIXMAP_DEFAULT))
kfree(fb_info->pixmap.addr);
//销毁fb_info->modelist模式链表
fb_destroy_modelist(&fb_info->modelist);
//将占用的registered_fb数组中的变量置为NULL,表示空闲
registered_fb[i]=NULL;
//内核中注册的帧缓冲设备数量减一
num_registered_fb--;
//销毁点帧缓冲设备的属性文件
fb_cleanup_device(fb_info);
//销毁掉帧缓冲设备
device_destroy(fb_class, MKDEV(FB_MAJOR, i));
event.info = fb_info;
//通知发生了FB_EVENT_FB_UNREGISTERED事件,表示该帧缓冲设备已经被注销掉
fb_notifier_call_chain(FB_EVENT_FB_UNREGISTERED, &event);
//如果fb_info结构体中有销毁函数就调用销毁函数
/* this may free fb info */
if (fb_info->fbops->fb_destroy)
fb_info->fbops->fb_destroy(fb_info);
done:
return ret;
}
2.4.3 fb_ops分析
fb_ops中的操作函数属于框架部分,并不和具体的硬件相关,在进行一些处理后最后都是调用struct fb_info结构体中fb_ops定义的操作方法;
!
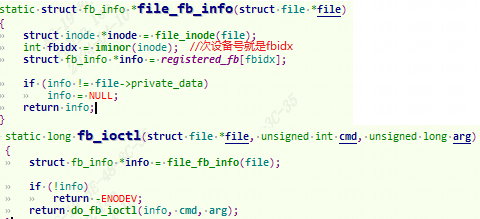
2.4.3.1 fb_open
static int fb_open(struct inode *inode, struct file *file)
__acquires(&info->lock)
__releases(&info->lock)
{
//获取次设备号
int fbidx = iminor(inode);
struct fb_info *info;
int res = 0;
//判断次设备号是否在合法范围
if (fbidx >= FB_MAX)
return -ENODEV;
//根据次设备号找到对应的struct fb_info结构体指针
info = registered_fb[fbidx];
if (!info)
//如果数组下标fbidx的变量是NULL,手动加载帧缓冲设备
request_module("fb%d", fbidx);
//再次从registered_fb数组中获取对应的struct fb_info结构体指针
info = registered_fb[fbidx];
if (!info)
return -ENODEV;
mutex_lock(&info->lock);
if (!try_module_get(info->fbops->owner)) {
res = -ENODEV;
goto out;
}
//将struct fb_info结构体指针保存到struct file结构体的私有数据指针中,后续的接口会用到
file->private_data = info;
//调用帧缓冲设备驱动的fb_open函数
if (info->fbops->fb_open) {
res = info->fbops->fb_open(info,1);
if (res)
module_put(info->fbops->owner);
}
out:
mutex_unlock(&info->lock);
return res;
}
2.4.3.2 fb_write
static ssize_t fb_write(struct file *file, const char __user *buf, size_t count, loff_t *ppos){
//显示的偏移量
unsigned long p = *ppos;
//获取到设备节点的struct inode结构体
struct inode *inode = file->f_path.dentry->d_inode;
//从inode节点中获取次设备号
int fbidx = iminor(inode);
//以次设备号为下标在registered_fb数组中获取到对应的struct fb_info结构体指针
struct fb_info *info = registered_fb[fbidx];
u32 *buffer, *src;
u32 __iomem *dst;
int c, i, cnt = 0, err = 0;
unsigned long total_size;
if (!info || !info->screen_base)
return -ENODEV;
if (info->state != FBINFO_STATE_RUNNING)
return -EPERM;
//如果帧缓冲设备驱动中的struct fb_ops中有定义写帧缓冲的方法就执行
if (info->fbops->fb_write)
return info->fbops->fb_write(info, buf, count, ppos);
/*************执行通用的写帧缓冲的方法*************/
//虚拟内存的大小
total_size = info->screen_size;
if (total_size == 0)
total_size = info->fix.smem_len;
if (p > total_size)
return -EFBIG;
if (count > total_size) {
err = -EFBIG;
count = total_size;
}
//检查偏移量加上写入数据的大小是否超过虚拟内存的大小
if (count + p > total_size) {
if (!err)
err = -ENOSPC;
count = total_size - p;
}
buffer = kmalloc((count > PAGE_SIZE) ? PAGE_SIZE : count,
GFP_KERNEL);
if (!buffer)
return -ENOMEM;
//得到要写入帧缓冲区的起始地址:帧缓冲虚拟起始地址加上偏移量
dst = (u32 __iomem *) (info->screen_base + p);
//对于某些帧缓冲设备来说,必须等待它完成之前的显示处理操作,
//才能继续向帧缓冲中送入显示数据,该方t法用于该过程的同步
if (info->fbops->fb_sync)
info->fbops->fb_sync(info);
//向帧缓冲写入count个字节数据,如果写入的数据超过一个页的大小,则分多次写入
while (count) {
//将预写数据依次读到buffer中,每次写数据不超过PAGE_SIZE大小
c = (count > PAGE_SIZE) ? PAGE_SIZE : count;
src = buffer;
//把数据从用户空间拷贝到内核空间
if (copy_from_user(src, buf, c)) {
err = -EFAULT;
break;
}
//将数据写入到目标帧缓冲区地址
for (i = c >> 2; i--; )
fb_writel(*src++, dst++);
if (c & 3) {
u8 *src8 = (u8 *) src;
u8 __iomem *dst8 = (u8 __iomem *) dst;
for (i = c & 3; i--; )
fb_writeb(*src8++, dst8++);
dst = (u32 __iomem *) dst8;
}
*ppos += c;
buf += c;
cnt += c;
count -= c;
}
kfree(buffer);
return (cnt) ? cnt : err;
}
2.4.3.3 fb_mmap
static int fb_mmap(struct file *file, struct vm_area_struct * vma){
//获取次设备号
int fbidx = iminor(file->f_path.dentry->d_inode);
//根据次设备号获取到struct fb_info 结构体
struct fb_info *info = registered_fb[fbidx];
//得到驱动的fbops操作方法
struct fb_ops *fb = info->fbops;
unsigned long off;
unsigned long start;
u32 len;
if (vma->vm_pgoff > (~0UL >> PAGE_SHIFT))
return -EINVAL;
off = vma->vm_pgoff << PAGE_SHIFT;
if (!fb)
return -ENODEV;
mutex_lock(&info->mm_lock);
//如果fb_ops中实现了mmap方法,则调用之
if (fb->fb_mmap) {
int res;
res = fb->fb_mmap(info, vma);
mutex_unlock(&info->mm_lock);
return res;
}
/*******下面是通用的mmap方法********/
/* 获取映射帧缓冲的物理起始地址和长度 */
start = info->fix.smem_start;
len = PAGE_ALIGN((start & ~PAGE_MASK) + info->fix.smem_len);
if (off >= len) {
/* 如果off大于帧缓冲长度.则认为映射的是内存映射IO */
off -= len;
if (info->var.accel_flags) {
mutex_unlock(&info->mm_lock);
return -EINVAL;
}
//获取内存映射IO的物理起始地址和长度
start = info->fix.mmio_start;
len = PAGE_ALIGN((start & ~PAGE_MASK) + info->fix.mmio_len);
}
mutex_unlock(&info->mm_lock);
//保证页对齐
start &= PAGE_MASK;
if ((vma->vm_end - vma->vm_start + off) > len)
return -EINVAL;
//现在off表示映射设备内存实际的物理地址
off += start;
vma->vm_pgoff = off >> PAGE_SHIFT;
/* This is an IO map - tell maydump to skip this VMA */
vma->vm_flags |= VM_IO | VM_RESERVED;
//置页保护标识
fb_pgprotect(file, vma, off);
//建立从物理页帧号为 off》PAGE SH 工FT的物理内存,到虚拟地址为 vma->vm start 、
//大小为 vma->vm_end - vma->vm_start 、页保护标志为 vma->vm_page_prot的映射
if (io_remap_pfn_range(vma, vma->vm_start, off >> PAGE_SHIFT,
vma->vm_end - vma->vm_start, vma->vm_page_prot))
return -EAGAIN;
return 0;
}
2.4.3.4 fb_ioctl
| 宏定义 | 功能说明 |
|---|---|
| FBIOGET_VSCREENINFO | 获取屏幕可变参数 |
| FBIOPUT_VSCREENINFO | 设置屏幕可变参数 |
| FBIOGET_FSCREENINFO | 获取屏幕固定参数 |
| FBIOPUTCMAP | 设置颜色表 |
| FBIOGETCMAP | 获取颜色表 |
| FBIOPAN_DISPLAY | 动视窗显示 |
| FBIO_CURSOR | 光标设置,目前不支持 |
| FBIOGET_CON2FBMAP | 获取指定帧缓冲控制台对应的帧缓冲设备 |
| FBIOPUT_CON2FBMAP | 置指定的帧缓冲控制台对应的帧缓冲设备 |
| FBIOBLANK | 显示空白 |
3 Framebuffer驱动实例
3.1定义fb_info实例
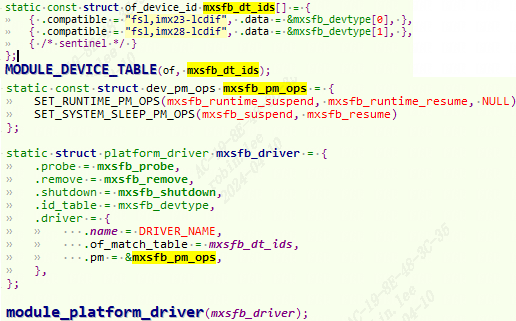
以飞思卡尔nxp的LCD控制器来说,叫做lcdif。位于drivers/video/fbdev/mxsfb.c,以像素时钟模式为例:

3.1.0 控制器dts配置
打开imx6ull.dtsi:
lcdif: lcdif@021c8000 {
compatible = "fsl,imx6u l-lcdif", "fsl,imx28-lcdif";
reg = <0x021c8000 0x4000>;
interrupts = <GIC_SPI 5 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&clks IMX6UL_CLK_LCDIF_PIX>,
<&clks IMX6UL_CLK_LCDIF_APB>,
<&clks IMX6UL_CLK_DUMMY>;
clock-names = "pix", "axi", "disp_axi";
status = "disabled";
};
compatible匹配,probe执行。
3.1.1 mxsfb_probe过程分析
static int mxsfb_probe(struct platform_device *pdev){
const struct of_device_id *of_id =
of_match_device(mxsfb_dt_ids, &pdev->dev);
struct resource *res;
struct mxsfb_info *host;
struct fb_info *fb_info;
struct pinctrl *pinctrl;
int irq = platform_get_irq(pdev, 0);
int gpio, ret;
if (of_id)
pdev->id_entry = of_id->data;
gpio = of_get_named_gpio(pdev->dev.of_node, "enable-gpio", 0);
if (gpio == -EPROBE_DEFER)
return -EPROBE_DEFER;
if (gpio_is_valid(gpio)) {
ret = devm_gpio_request_one(&pdev->dev, gpio, GPIOF_OUT_INIT_LOW, "lcd_pwr_en");
if (ret) {
dev_err(&pdev->dev, "faild to request gpio %d, ret = %d\n", gpio, ret);
return ret;
}
}
res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
if (!res) {
dev_err(&pdev->dev, "Cannot get memory IO resource\n");
return -ENODEV;
}
host = devm_kzalloc(&pdev->dev, sizeof(struct mxsfb_info), GFP_KERNEL);
if (!host) {
dev_err(&pdev->dev, "Failed to allocate IO resource\n");
return -ENOMEM;
}
fb_info = framebuffer_alloc(sizeof(struct fb_info), &pdev->dev);
if (!fb_info) {
dev_err(&pdev->dev, "Failed to allocate fbdev\n");
devm_kfree(&pdev->dev, host);
return -ENOMEM;
}
host->fb_info = fb_info;
fb_info->par = host;
ret = devm_request_irq(&pdev->dev, irq, mxsfb_irq_handler, 0,
dev_name(&pdev->dev), host);
if (ret) {
dev_err(&pdev->dev, "request_irq (%d) failed with error %d\n",
irq, ret);
ret = -ENODEV;
goto fb_release;
}
host->base = devm_ioremap_resource(&pdev->dev, res);
if (IS_ERR(host->base)) {
dev_err(&pdev->dev, "ioremap failed\n");
ret = PTR_ERR(host->base);
goto fb_release;
}
host->pdev = pdev;
platform_set_drvdata(pdev, host);
host->devdata = &mxsfb_devdata[pdev->id_entry->driver_data];
host->clk_pix = devm_clk_get(&host->pdev->dev, "pix");
if (IS_ERR(host->clk_pix)) {
host->clk_pix = NULL;
ret = PTR_ERR(host->clk_pix);
goto fb_release;
}
host->clk_axi = devm_clk_get(&host->pdev->dev, "axi");
if (IS_ERR(host->clk_axi)) {
host->clk_axi = NULL;
ret = PTR_ERR(host->clk_axi);
goto fb_release;
}
host->clk_disp_axi = devm_clk_get(&host->pdev->dev, "disp_axi");
if (IS_ERR(host->clk_disp_axi)) {
host->clk_disp_axi = NULL;
ret = PTR_ERR(host->clk_disp_axi);
goto fb_release;
}
host->reg_lcd = devm_regulator_get(&pdev->dev, "lcd");//电流整流:和电源管理有关,实现低功耗
if (IS_ERR(host->reg_lcd))
host->reg_lcd = NULL;
fb_info->pseudo_palette = devm_kzalloc(&pdev->dev, sizeof(u32) * 16,
GFP_KERNEL);
if (!fb_info->pseudo_palette) {
ret = -ENOMEM;
goto fb_release;
}
INIT_LIST_HEAD(&fb_info->modelist);
pm_runtime_enable(&host->pdev->dev);
ret = mxsfb_init_fbinfo(host);
if (ret != 0)
goto fb_pm_runtime_disable;
mxsfb_dispdrv_init(pdev, fb_info);
if (!host->dispdrv) {
pinctrl = devm_pinctrl_get_select_default(&pdev->dev);
if (IS_ERR(pinctrl)) {
ret = PTR_ERR(pinctrl);
goto fb_pm_runtime_disable;
}
}
if (!host->enabled) {
writel(0, host->base + LCDC_CTRL);
mxsfb_set_par(fb_info);
mxsfb_enable_controller(fb_info);
pm_runtime_get_sync(&host->pdev->dev);
}
ret = register_framebuffer(fb_info);
if (ret != 0) {
dev_err(&pdev->dev, "Failed to register framebuffer\n");
goto fb_destroy;
}
console_lock();
ret = fb_blank(fb_info, FB_BLANK_UNBLANK);
console_unlock();
if (ret < 0) {
dev_err(&pdev->dev, "Failed to unblank framebuffer\n");
goto fb_unregister;
}
dev_info(&pdev->dev, "initialized\n");
return 0;
fb_unregister:
unregister_framebuffer(fb_info);
fb_destroy:
if (host->enabled)
clk_disable_unprepare(host->clk_pix);
fb_destroy_modelist(&fb_info->modelist);
fb_pm_runtime_disable:
pm_runtime_disable(&host->pdev->dev);
devm_kfree(&pdev->dev, fb_info->pseudo_palette);
fb_release:
framebuffer_release(fb_info);
devm_kfree(&pdev->dev, host);
return ret;
}
-
host结构体指针变量,表示LDCIF控制器,包含Framebuffer设备详细信息,比如时钟、eLCDIF控制器寄存器基地址、fb_info等。 -
从dts中提取
gpio, irq, res,时钟等信息。初始化host, fb_info等结构体。 -
host->base = devm_ioremap_resource(&pdev->dev, res);对io内存进行ioremap, 把eLCDIF控制器地址映射成虚拟地址。 -
mxsfb_init_fbinfo: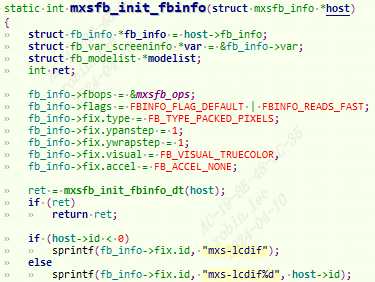
-
设置
eLCDIF控制器具体的fb_opsstatic struct fb_ops mxsfb_ops = { .owner = THIS_MODULE, .fb_check_var = mxsfb_check_var, .fb_set_par = mxsfb_set_par, .fb_setcolreg = mxsfb_setcolreg, .fb_ioctl = mxsfb_ioctl, .fb_blank = mxsfb_blank, .fb_pan_display = mxsfb_pan_display, .fb_mmap = mxsfb_mmap, .fb_fillrect = cfb_fillrect, .fb_copyarea = cfb_copyarea, .fb_imageblit = cfb_imageblit, }; -
从dts获取LCD 的各个参数信息,然后调用
mxsfb_map_videomem申请framebuffer空间,也就是显存。
-
-
fb_videomode_to_var设置ldc的可变属性 -
设置控制器寄存器信息
writel(0, host->base + LCDC_CTRL); mxsfb_set_par(fb_info); mxsfb_enable_controller(fb_info); -
调用
register_framebuffer函数向 Linux 内核注册fb_info。
在mxsfb.c中已经定义了 eLCDIF 控制器各个寄存器相比于基地址的偏移值:
#define LCDC_CTRL 0x00
#define LCDC_CTRL1 0x10
#define LCDC_V4_CTRL2 0x20
#define LCDC_V3_TRANSFER_COUNT 0x20
#define LCDC_V4_TRANSFER_COUNT 0x30
#define LCDC_V4_CUR_BUF 0x40
#define LCDC_V4_NEXT_BUF 0x50
#define LCDC_V3_CUR_BUF 0x30
#define LCDC_V3_NEXT_BUF 0x40
#define LCDC_TIMING 0x60
#define LCDC_VDCTRL0 0x70
#define LCDC_VDCTRL1 0x80
#define LCDC_VDCTRL2 0x90
#define LCDC_VDCTRL3 0xa0
#define LCDC_VDCTRL4 0xb0
#define LCDC_DVICTRL0 0xc0
#define LCDC_DVICTRL1 0xd0
#define LCDC_DVICTRL2 0xe0
#define LCDC_DVICTRL3 0xf0
#define LCDC_DVICTRL4 0x100
#define LCDC_V4_DATA 0x180
#define LCDC_V3_DATA 0x1b0
#define LCDC_V4_DEBUG0 0x1d0
#define LCDC_V3_DEBUG0 0x1f0
3.2 LCD屏幕dts描述
3.2.1 屏幕 IO 配置
除了eLCDIF 控制器,对LCD设备也需要进行描述,主要是引脚pinmux。比如imx6ull-alientek-emmc.dts这块板子对应的LCD屏幕使用引脚如下,iomuxc 节点下有如下节点:
pinctrl_lcdif_dat: lcdifdatgrp {//数据引脚,24根,rgb888
fsl,pins = <
MX6UL_PAD_LCD_DATA00__LCDIF_DATA00 0x79
MX6UL_PAD_LCD_DATA01__LCDIF_DATA01 0x79
MX6UL_PAD_LCD_DATA02__LCDIF_DATA02 0x79
MX6UL_PAD_LCD_DATA03__LCDIF_DATA03 0x79
MX6UL_PAD_LCD_DATA04__LCDIF_DATA04 0x79
MX6UL_PAD_LCD_DATA05__LCDIF_DATA05 0x79
MX6UL_PAD_LCD_DATA06__LCDIF_DATA06 0x79
MX6UL_PAD_LCD_DATA07__LCDIF_DATA07 0x79
MX6UL_PAD_LCD_DATA08__LCDIF_DATA08 0x79
MX6UL_PAD_LCD_DATA09__LCDIF_DATA09 0x79
MX6UL_PAD_LCD_DATA10__LCDIF_DATA10 0x79
MX6UL_PAD_LCD_DATA11__LCDIF_DATA11 0x79
MX6UL_PAD_LCD_DATA12__LCDIF_DATA12 0x79
MX6UL_PAD_LCD_DATA13__LCDIF_DATA13 0x79
MX6UL_PAD_LCD_DATA14__LCDIF_DATA14 0x79
MX6UL_PAD_LCD_DATA15__LCDIF_DATA15 0x79
MX6UL_PAD_LCD_DATA16__LCDIF_DATA16 0x79
MX6UL_PAD_LCD_DATA17__LCDIF_DATA17 0x79
MX6UL_PAD_LCD_DATA18__LCDIF_DATA18 0x79
MX6UL_PAD_LCD_DATA19__LCDIF_DATA19 0x79
MX6UL_PAD_LCD_DATA20__LCDIF_DATA20 0x79
MX6UL_PAD_LCD_DATA21__LCDIF_DATA21 0x79
MX6UL_PAD_LCD_DATA22__LCDIF_DATA22 0x79
MX6UL_PAD_LCD_DATA23__LCDIF_DATA23 0x79
>;
};
pinctrl_lcdif_ctrl: lcdifctrlgrp {//控制引脚,hsync vsync pixclk en等...
fsl,pins = <
MX6UL_PAD_LCD_CLK__LCDIF_CLK 0x79
MX6UL_PAD_LCD_ENABLE__LCDIF_ENABLE 0x79
MX6UL_PAD_LCD_HSYNC__LCDIF_HSYNC 0x79
MX6UL_PAD_LCD_VSYNC__LCDIF_VSYNC 0x79
>;
};
pinctrl_pwm1: pwm1grp {//背光亮度
fsl,pins = <
MX6UL_PAD_GPIO1_IO08__PWM1_OUT 0x110b0
>;
};
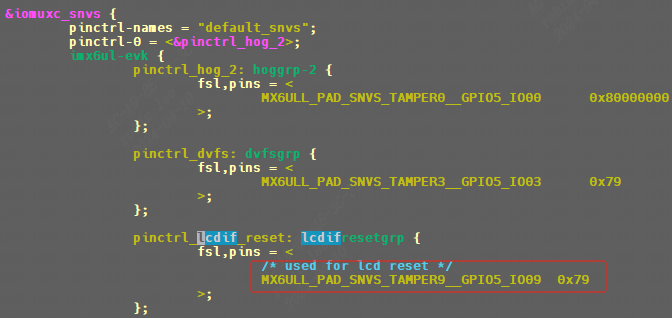
以及iomixc_snvs下有一个reset节点:
pinctrl_lcdif_dat,为 RGB LCD 的 24 根数据线配置项
pinctrl_lcdif_ctrl,RGB LCD 的 4 根控制线配置项,包括 CLK、 ENABLE、VSYNC 和 HSYNC
pinctrl_pwm1,LCD 背光 PWM 引脚配置项
可以看到控制和数据引脚的电器属性默认nxp都帮我们设置成了0x79。
3.2.2 屏幕节点
&lcdif {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_lcdif_dat /* 使用到的 IO */
&pinctrl_lcdif_ctrl
&pinctrl_lcdif_reset>;
display = <&display0>;
status = "okay";
display0: display { /* LCD 属性信息 */
bits-per-pixel = <16>; /* 一个像素占用几个 bit */
bus-width = <24>; /* 总线宽度 */
display-timings {
native-mode = <&timing0>; /* 时序信息 */
timing0: timing0 {
clock-frequency = <9200000>; /* LCD 像素时钟,单位 Hz */
hactive = <480>; /* LCD X 轴像素个数 */
vactive = <272>; /* LCD Y 轴像素个数 */
hfront-porch = <8>; /* LCD hfp 参数 */
hback-porch = <4>; /* LCD hbp 参数 */
hsync-len = <41>; /* LCD hspw 参数 */
vback-porch = <2>; /* LCD vbp 参数 */
vfront-porch = <4>; /* LCD vfp 参数 */
vsync-len = <10>; /* LCD vspw 参数 */
hsync-active = <0>; /* hsync 数据线极性 */
vsync-active = <0>; /* vsync 数据线极性 */
de-active = <1>; /* de 数据线极性 */
pixelclk-active = <0>; /* clk 数据线先极性 */
};
};
};
};
display0 子节点,描述 LCD 的参数信息,包括bpp, bus-width,时序特性,这些参数跟随具体的屏厂屏幕规格走。例如另一款屏幕ATK7016(7 寸 1024*600)屏幕:可以看到这款屏幕是RGB888的,bpp是3byte。
display0: display {
bits-per-pixel = <24>; /* 一个像素占用 24bit */
bus-width = <24>; /* 总线宽度 */
display-timings {
native-mode = <&timing0>; /* 时序信息 */
timing0: timing0 {
clock-frequency = <51200000>;/* LCD 像素时钟,单位 Hz */
hactive = <1024>; /* LCD X 轴像素个数 */
vactive = <600>; /* LCD Y 轴像素个数 */
hfront-porch = <160>; /* LCD hfp 参数 */
hback-porch = <140>; /* LCD hbp 参数 */
hsync-len = <20>; /* LCD hspw 参数 */
vback-porch = <20>; /* LCD vbp 参数 */
vfront-porch = <12>; /* LCD vfp 参数 */
vsync-len = <3>; /* LCD vspw 参数 */
hsync-active = <0>; /* hsync 数据线极性 */
vsync-active = <0>; /* vsync 数据线极性 */
de-active = <1>; /* de 数据线极性 */
pixelclk-active = <0>; /* clk 数据线先极性 */
};
};
};
3.2.3 背光节点
LCD 背光要用到 PWM1,因此也要设置 PWM1 节点,如果背光只用简单的gpio,那么只能控制亮灭。无法控制亮度, 在imx6ull.dtsi文件中找到pwm1描述:
pwm1: pwm@02080000 {
compatible = "fsl,imx6ul-pwm", "fsl,imx27-pwm";
reg = <0x02080000 0x4000>;
interrupts = <GIC_SPI 83 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&clks IMX6UL_CLK_PWM1>,
<&clks IMX6UL_CLK_PWM1>;
clock-names = "ipg", "per";
#pwm-cells = <2>;
};
imx6ull 的 PWM 驱动文件为 drivers/pwm/pwm-imx.c,具体Linux下PWM子系统 - fuzidage - 博客园 (cnblogs.com)
字符设备驱动-PWM子系统 | Hexo (fuzidage.github.io)。只要会使用pwm1即可,打开imx6ull-alientek-emmc.dts这块板子:
往pwm1添加如下内容,设置好pwm1对应的引脚:
&pwm1 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_pwm1>;
status = "okay";
};
也就是MX6UL_PAD_GPIO1_IO08__PWM1_OUT,将gpio1_8设成pwm输出。
3.2.3.1 backlight设置
我们还需要一个节点来将 LCD 背光和 PWM1_OUT 连接起来。这个节点就是 backlight , backlight 节点描述可以参考 Documentation/devicetree/indings/video/backlight/pwm-backlight.txt。
backlight {
compatible = "pwm-backlight";
pwms = <&pwm1 0 5000000>;
brightness-levels = <0 4 8 16 32 64 128 255>;
default-brightness-level = <6>;
status = "okay";
};
-
设置背
8 级背光(0~7),分别为0、4、8、16、32、64、128、255,对应占空比为0%、1.57%、3.13%、6.27%、12.55%、25.1%、50.19%、100%,如果嫌少的话可以自行添加一 些其他的背光等级值。 -
设置默认背光等级为 6,也就是
50.19%的亮度
backlight 节点说明:
1. 节点名称要为“backlight”
2. compatible 属性值要为“pwm-backlight”,因此可以通过在 Linux 内核中搜索 “ pwm-backlight ” 来查找PWM背光控制驱动程序 , 文件为 drivers/video/backlight/pwm_bl.c
3. pwms属性用于描述背光所使用的PWM以及PWM频率,比如本章我们要使用的pwm1, pwm 频率设置为 200Hz
4. brightness-levels 属性描述亮度级别,范围为 0~255,0 表示 PWM 占空比为 0%,也就 是亮度最低,255 表示 100%占空比,也就是亮度最高
5. default-brightness-level 属性为默认亮度级别
4 LCD测试
4.1 使能 Linux logo
Linux 内核启动的时候可以选择显示小企鹅 logo,一般默认关闭。
-> Device Drivers
-> Graphics support
-> Bootup logo (LOGO [=y])
-> Standard black and white Linux logo
-> Standard 16-color Linux logo
-> Standard 224-color Linux logo
三个选项分别对应黑白、16 位、24 位色彩格式的 logo,我们把这三个都选 中,都编译进 Linux 内核里面。
4.2 LCD 作为终端控制台console
-
u-boot中bootargs设置
setenv bootargs 'console=tty1 console=ttymxc0,115200 root=/dev/nfs rw nfsroot=192.168.1.250: /home/zuozhongkai/linux/nfs/rootfs ip=192.168.1.251:192.168.1.250:192.168.1.1:255.255.255.0::eth0: off'第一次设置
console=tty1, 也就是设置 LCD 屏幕为控制台,第二遍又设置console=ttymxc0,115200,也就是设置串口也作为控制台。大家重启开发板就会发 现 LCD 和串口都会显示 Linux 启动 log 信息。 -
修改
/etc/inittab添加下面这行,
tty1::askfirst:-/bin/sh
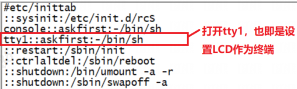
修改完成以后保存/etc/inittab 并退出,然后重启开发板,重启以后开发板 LCD 屏幕最后一 行会显示下面一行语句:
Please press Enter to activate this console
为什么请参考: linux内核-4.rootfs构建移植
Linux内核-rootfs构建移植 | Hexo (fuzidage.github.io)
大家也可以接上一个 USB 键盘,Linux 内核默认已经使能了 USB 键盘驱动 了,因此可以直接使用 USB 键盘Enter键。
当然也可以利用input子系统来用一个gpio按键做成Enter键。见: linux驱动-17-input子系统
字符设备驱动-input子系统 | Hexo (fuzidage.github.io)
4.3 LCD 背光调节命令
前面背光设备树节点设置了 8 个等级的背光调节,可以设置为 0~7,我 们可以通过设置背光等级来实现 LCD 背光亮度的调节:
/sys/devices/platform/backlight/backlight/backlight


echo 7 > brightness设置亮度为100%, echo 0 >brightness设置成熄灭背光。
4.4 LCD屏幕自动熄灭
4.1.1 按键盘唤醒
默认情况下 10 分钟以后 LCD 就会熄屏,这个并不是代码有问题,而是 Linux 内核设置的。按下回车键就会唤醒屏幕。
4.1.2 关闭10分钟自动熄屏
drivers/tty/vt/vt.c中,blankinterval变量控制着 LCD 关闭时间,默认是10*60,也就是 10 分钟。将blankinterval的值改为 0 即可关闭 10 分钟熄屏的功能。
181 static int blankinterval = 10*60;
182 core_param(consoleblank, blankinterval, int, 0444);
echo -e '\033[9;0]' > /dev/tty0
4.5 测试代码
#include <unistd.h>
#include <stdio.h>
#include <fcntl.h>
#include <linux/fb.h>
#include <sys/mman.h>
#include <stdlib.h>
#include <string.h>
#include <stdint.h>
#include <sys/ioctl.h>
#define PAUSE() \
do { \
printf("---------------press Enter key to continue!---------------\n"); \
getchar(); \
} while (0)
#if 1 // 32bits
#define RED 0xFFFF0000
#define GREEN 0xFF00FF00
#define BLUE 0xFF0000FF
#define YELLOW 0xFFFFFF00
#define WHITE 0xFFFFFFFF
#define BLACK 0xFF000000
void fill_color(uint32_t *fb_addr, uint32_t bit_map, int psize)
{
int i;
for(i=0; i<psize; i++) {
*fb_addr = bit_map;
fb_addr++;
}
}
#else // 16bits
#define RED 0xFC00
#define GREEN 0x83E0
#define BLUE 0x801F
#define YELLOW 0xFFE0
#define WHITE 0xFFFF
#define BLACK 0x8000
void fill_color(short *fb_addr, short bit_map, int psize)
{
int i;
for(i=0; i<psize; i++) {
*fb_addr = bit_map;
fb_addr++;
}
}
#endif
void _fb_get_info(int fp, struct fb_fix_screeninfo *finfo, struct fb_var_screeninfo *vinfo)
{
long screensize=0;
if(ioctl(fp, FBIOGET_FSCREENINFO, finfo)){
printf("Error reading fixed information/n");
exit(2);
}
if(ioctl(fp, FBIOGET_VSCREENINFO, vinfo)){
printf("Error reading variable information/n");
exit(3);
}
screensize = finfo->line_length * vinfo->yres;
printf("The ID=%s\n", finfo->id);
printf("The phy mem = 0x%x, total size = %d(byte)\n", finfo->smem_start, finfo->smem_len);
printf("line length = %d(byte)\n", finfo->line_length);
printf("xres = %d, yres = %d, bits_per_pixel = %d\n", vinfo->xres, vinfo->yres, vinfo->bits_per_pixel);
printf("xresv = %d, yresv = %d\n", vinfo->xres_virtual, vinfo->yres_virtual);
printf("vinfo.xoffset = %d, vinfo.yoffset = %d\n", vinfo->xoffset, vinfo->yoffset);
printf("vinfo.vmode is :%d\n", vinfo->vmode);
printf("finfo.ypanstep is :%d\n", finfo->ypanstep);
printf("vinfo.red.offset=0x%x\n", vinfo->red.offset);
printf("vinfo.red.length=0x%x\n", vinfo->red.length);
printf("vinfo.green.offset=0x%x\n", vinfo->green.offset);
printf("vinfo.green.length=0x%x\n", vinfo->green.length);
printf("vinfo.blue.offset=0x%x\n", vinfo->blue.offset);
printf("vinfo.blue.length=0x%x\n", vinfo->blue.length);
printf("vinfo.transp.offset=0x%x\n", vinfo->transp.offset);
printf("vinfo.transp.length=0x%x\n", vinfo->transp.length);
printf("Expected screensize = %d(byte), using %d frame\n", screensize, finfo->smem_len/screensize);
}
int main () {
int fp=0;
struct fb_var_screeninfo vinfo;
struct fb_fix_screeninfo finfo;
void *fbp = NULL;
char *test_fbp = NULL;
int x = 0, y = 0;
long location = 0;
int i;
int num = 2;
int pix_size=0;
fp = open("/dev/fb0", O_RDWR);
if(fp < 0) {
printf("Error : Can not open framebuffer device/n");
exit(1);
}
printf("-- Default fb info --\n");
_fb_get_info(fp, &finfo, &vinfo);
#if 1
vinfo.xres = 720;
vinfo.yres = 1280;
if(ioctl(fp, FBIOPUT_VSCREENINFO, &vinfo)){
printf("Error putting variable information/n");
exit(3);
}
printf("-- Updated fb info --\n");
_fb_get_info(fp, &finfo, &vinfo);
#endif
fbp = mmap(0, finfo.smem_len, PROT_READ | PROT_WRITE, MAP_SHARED, fp, 0);
if (fbp == MAP_FAILED){
printf ("Error: failed to map framebuffer device to memory.\n");
exit (4);
}
printf("Get virt mem = %p\n", fbp);
pix_size = vinfo.xres * vinfo.yres;
/* using first frame, for FBIOPAN_DISPLAY
* 当刷新需要调用FBIOPAN_DISPLAY, 要告知驱动刷哪块帧, 用到下面两个参数
* 如果使用第二帧buffer -> vinfo.xoffset = 0; vinfo.yoffset = vinfo.yres;
*/
vinfo.xoffset = 0;
vinfo.yoffset = 0;
/* show color loop */
while(num--) {
printf("\ndrawing YELLOW......\n");
fill_color(fbp, YELLOW, pix_size);
//ioctl(fp, FBIOPAN_DISPLAY, &vinfo);
sleep(3);
printf("\ndrawing BLUE......\n");
fill_color(fbp, BLUE, pix_size);
//ioctl(fp, FBIOPAN_DISPLAY, &vinfo);
sleep(3);
printf("\ndrawing RED......\n");
fill_color(fbp, RED, pix_size);
//ioctl(fp, FBIOPAN_DISPLAY, &vinfo);
sleep(3);
PAUSE();
}
#if 1
/*这是你想画的点的位置坐标,(0,0)点在屏幕左上角*/
x = 10;
y = 10;
location = x * (vinfo.bits_per_pixel / 8) + y * finfo.line_length;
test_fbp = fbp + location;
printf("draw line.......\n");
for(i = 0; i < (vinfo.xres - x); i++)
*test_fbp++ = i+30;
//ioctl(fp, FBIOPAN_DISPLAY, &vinfo);
PAUSE();
#endif
munmap(fbp, finfo.smem_len); /*解除映射*/
close (fp);
return 0;
}


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 别再用vector<bool>了!Google高级工程师:这可能是STL最大的设计失误
· 单元测试从入门到精通
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 上周热点回顾(3.3-3.9)
2020-05-09 s3c2440裸机-内存控制器(三-2、norflash编程之适配访问时序)