
1 6轴陀螺仪加速度传感器ICM-20608-G
1.1 概述
The ICM-20608-G is a 6-axis MotionTracking device that combines a 3-axis gyroscope, and a 3-axis accelerometer in a small 3x3x0.75mm (16-pin LGA) package.
The gyroscope has a programmable full-scale range of ±250, ±500, ±1000, and ±2000 degrees/sec. The accelerometer has a user programmable accelerometer full-scale range of ±2g, ±4g, ±8g, and ±16g.
Other industry-leading features include on-chip 16-bit ADCs, programmable digital filters, an embedded temperature sensor, and programmable interrupts. The device features I2 C and SPI serial interfaces, a VDD operating range of 1.71 to 3.45V, and a separate digital IO supply, VDDIO from 1.71V to 3.45V. Communication with all registers of the device is performed using either I2 C at 400kHz or SPI at 8MHz.
1.包含3轴陀螺仪数据和3轴加速度数据。
2.陀螺仪和加速度量程可设定,陀螺仪量程可设定位+-250,+-500,+-1000, +-2000角度每秒。加速度同理也可设定量程。
3.精度为16bit ADC转换。
4.使用I2C/SPI接口通信,I2C速率高达400KHz, SPI高达8MHz。
1.2 应用场景
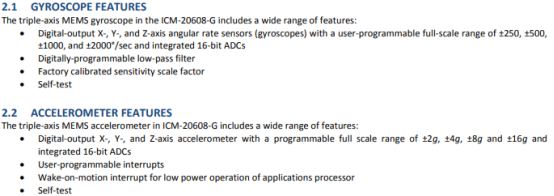
1.3 陀螺仪和加速度特性
1.4 电器特性
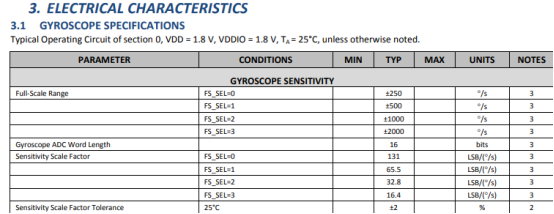
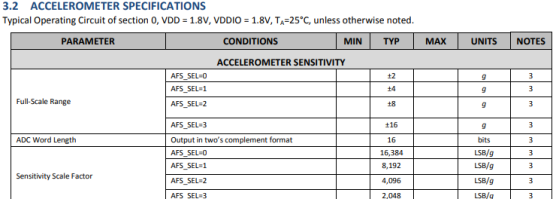
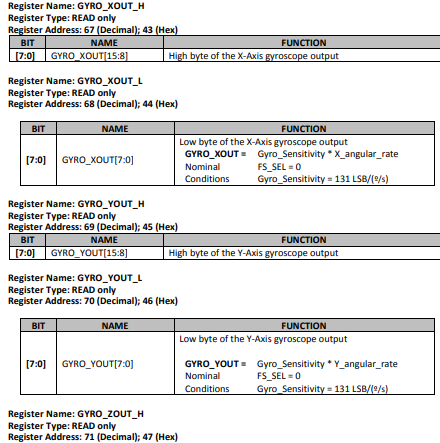
可以看到FS_SEL,AFS_SEL用来选择陀螺仪和加速度计的量程。举个例子,当角速度量程为+-250时,那么ADC的数据为多少表示为1度呢?已知ADC精度16bit, 数据范围[0,65535], 假如ADC的数据为x, 那么x/65636 = 1/500,算出x= 131.272x,对应表格数据中的131。加速度的换算公式也是同理, 当AFS_SEL=0时,x/65536 = 1/4, x=16384。
1.5 交流电器特性
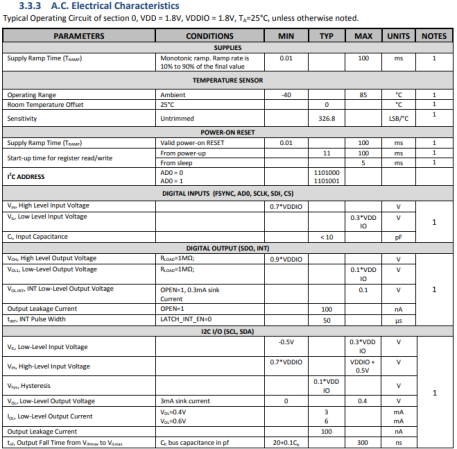
当用i2c通信,AD0引脚决定i2c从地址是0x68还是0x69。可以看到power-on reset上电时序,需要Valid power-on RESET时间最少0.01ms, 从启动到寄存器读写等11ms。
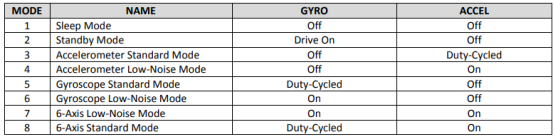
1.6 工作模式
1.7 SPI方式寄存器访问
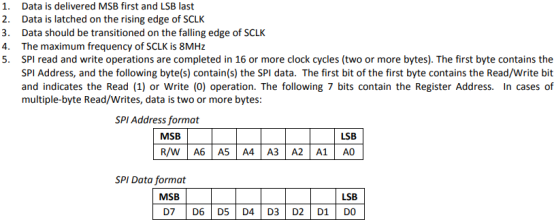
数据上升沿锁存,下降沿数据发生改变。最大高达8MHz时钟,一次读写需要16个或者更多时钟周期,第一个字节传输寄存器地址,第二个字节传输数据。首字节的首位表示是读还是写。
#define ICM20608_CSN(n) (n ? gpio_pinwrite(GPIO1, 20, 1) : gpio_pinwrite(GPIO1, 20, 0)) /* SPI片选信号 */
/*
* @description : 写ICM20608指定寄存器
* @param - reg : 要读取的寄存器地址
* @param - value: 要写入的值
* @return : 无
*/
void icm20608_write_reg(unsigned char reg, unsigned char value)
{
/* ICM20608在使用SPI接口的时候寄存器地址
* 只有低7位有效,寄存器地址最高位是读/写标志位
* 读的时候要为1,写的时候要为0。
*/
reg &= ~0X80;
ICM20608_CSN(0); /* 使能SPI传输 */
spich0_readwrite_byte(ECSPI3, reg); /* 发送寄存器地址 */
spich0_readwrite_byte(ECSPI3, value); /* 发送要写入的值 */
ICM20608_CSN(1); /* 禁止SPI传输 */
}
/*
* @description : 读取ICM20608寄存器值
* @param - reg : 要读取的寄存器地址
* @return : 读取到的寄存器值
*/
unsigned char icm20608_read_reg(unsigned char reg)
{
unsigned char reg_val;
/* ICM20608在使用SPI接口的时候寄存器地址
* 只有低7位有效,寄存器地址最高位是读/写标志位
* 读的时候要为1,写的时候要为0。
*/
reg |= 0x80;
ICM20608_CSN(0); /* 使能SPI传输 */
spich0_readwrite_byte(ECSPI3, reg); /* 发送寄存器地址 */
reg_val = spich0_readwrite_byte(ECSPI3, 0XFF); /* 读取寄存器的值 */
ICM20608_CSN(1); /* 禁止SPI传输 */
return(reg_val); /* 返回读取到的寄存器值 */
}
2 ICM-20608-G寄存器描述
ICM-20608-G寄存器的地址和数据都是单字节。
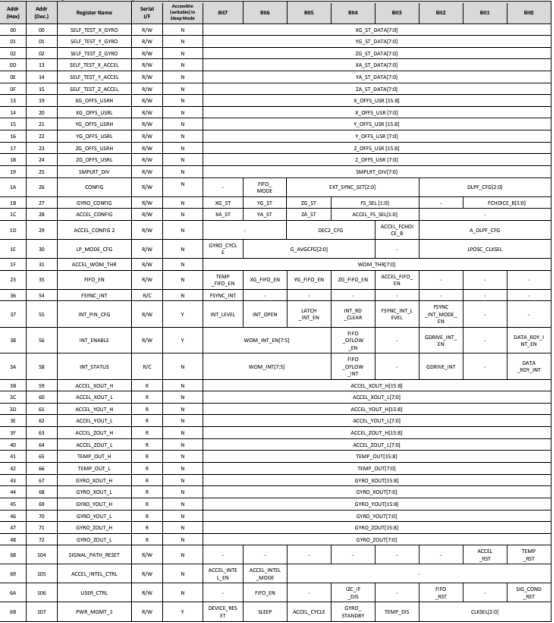
2.1 控制寄存器
控制配置寄存器0x1a,0x1b,0x1c,0x1d,设置量程等配置。

0x19设置分频,不分频,配成0
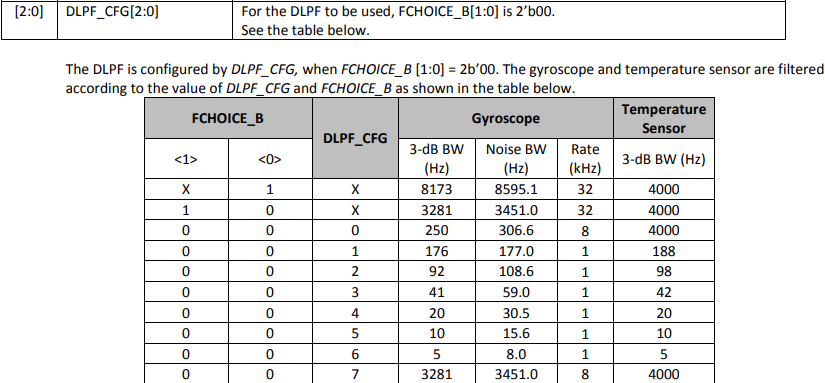
0x1a设置陀螺仪低通滤波带宽BW=20Hz,配成0x4.
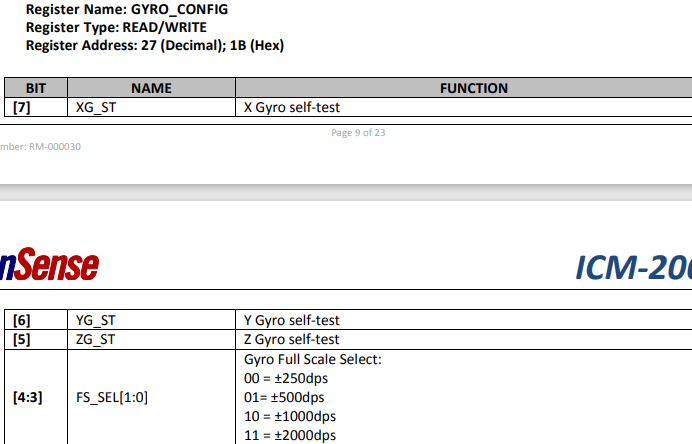
0x1b设置gyro量程,配成最大0x18.
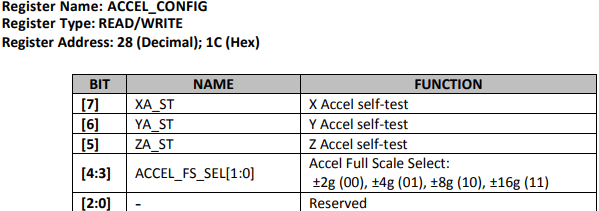
0x1c设置加速度计的量程,也配成最大0x18.
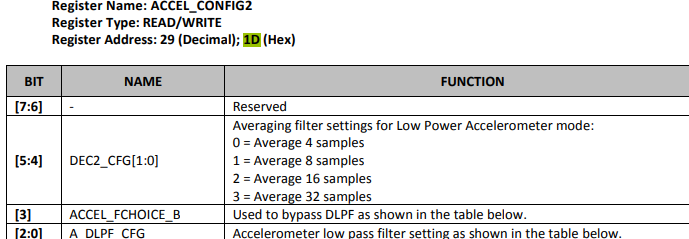
0x1d设置加速度计低通滤波BW=21.2Hz
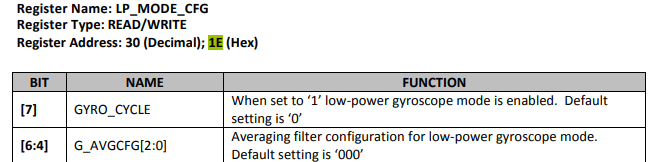
0x1e设置low power,配成0,关闭低功耗.
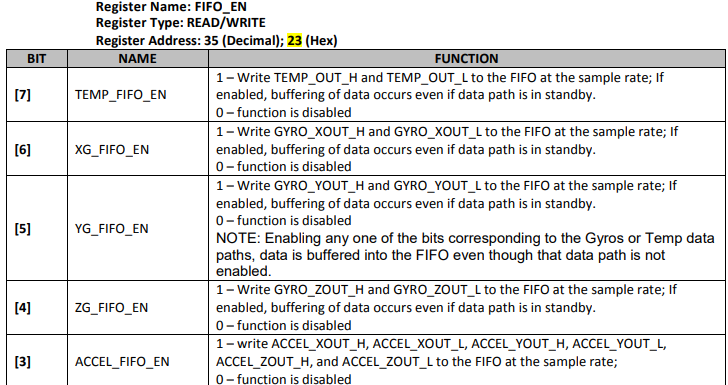
0x23设置fifo功能,这里配置0x0,禁用fifo.
设定量程,配置相关参数:
#define ICM20_SMPLRT_DIV 0x19
#define ICM20_CONFIG 0x1A
#define ICM20_GYRO_CONFIG 0x1B
#define ICM20_ACCEL_CONFIG 0x1C
#define ICM20_ACCEL_CONFIG2 0x1D
#define ICM20_LP_MODE_CFG 0x1E
#define ICM20_FIFO_EN 0x23
icm20608_write_reg(ICM20_SMPLRT_DIV, 0x00); /* 输出速率是内部采样率 */
icm20608_write_reg(ICM20_GYRO_CONFIG, 0x18); /* 陀螺仪±2000dps量程 */
icm20608_write_reg(ICM20_ACCEL_CONFIG, 0x18); /* 加速度计±16G量程 */
icm20608_write_reg(ICM20_CONFIG, 0x04); /* 陀螺仪低通滤波BW=20Hz */
icm20608_write_reg(ICM20_ACCEL_CONFIG2, 0x04); /* 加速度计低通滤波BW=21.2Hz */
icm20608_write_reg(ICM20_PWR_MGMT_2, 0x00); /* 打开加速度计和陀螺仪所有轴 */
icm20608_write_reg(ICM20_LP_MODE_CFG, 0x00); /* 关闭低功耗 */
icm20608_write_reg(ICM20_FIFO_EN, 0x00); /* 关闭FIFO */
2.2 数据寄存器
数据寄存器0x3b~0x48表示加速度和陀螺仪数据,可以看到该传感器的寄存器地址都是单字节,ADC精度16bit,因此需要2个寄存器来表示一个轴的坐标数据。
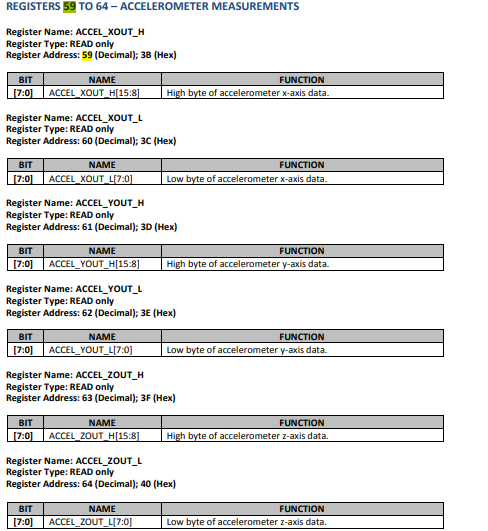
0x3b-0x40表示加速度计3轴数据。
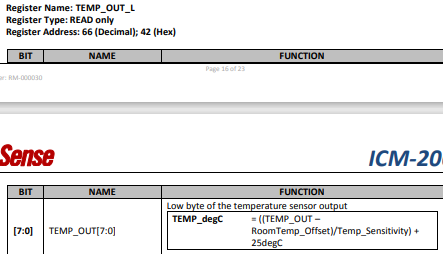
0x42 温度数据
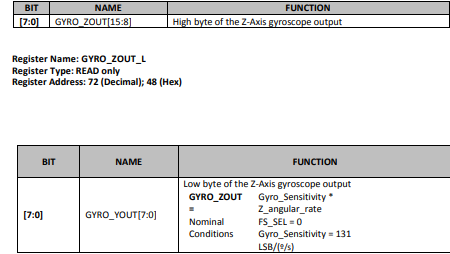
0x43~0x48陀螺仪3轴数据。
2.3 WHO_AM_I
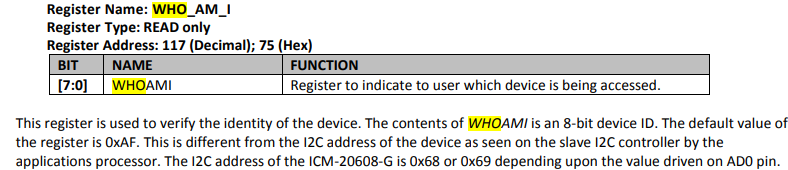
寄存器表示设备ID,默认0xAF.
2.4 PWR_MGMT_1/PWR_MGMT_2
电源管理模式寄存器
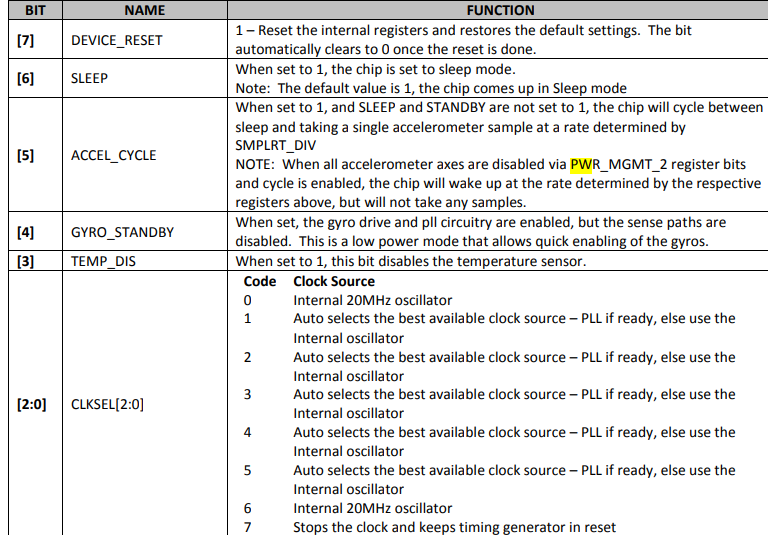
可以看到bit6默认是一个sleep mode, bit7是复位信号,复位后,默认bit6会变成1,进入睡眠模式。Bit4 陀螺仪待机,bit3关闭温度传感器等等都不要开启,设置成0,bit[2:0]时钟选择自动。
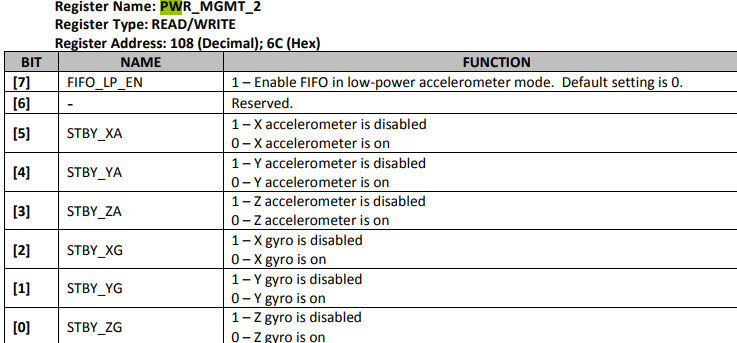
可以看到设置成0,6轴数据全使能
复位初始化:
#define ICM20_PWR_MGMT_1 0x6B
#define ICM20_WHO_AM_I 0x75
icm20608_write_reg(ICM20_PWR_MGMT_1, 0x80); /* 复位,复位后为0x40,睡眠模式 */
delayms(50);
icm20608_write_reg(ICM20_PWR_MGMT_1, 0x01); /* 关闭睡眠,自动选择时钟 */
delayms(50);
regvalue = icm20608_read_reg(ICM20_WHO_AM_I);
printf("icm20608 id = %#X\r\n", regvalue);
3 代码解析
icm20608.h
/* ICM20608寄存器
*复位后所有寄存器地址都为0,除了
*Register 107(0X6B) Power Management 1 = 0x40
*Register 117(0X75) WHO_AM_I = 0xAF或0xAE
*/
/* 陀螺仪和加速度自测(出产时设置,用于与用户的自检输出值比较) */
#define ICM20_SELF_TEST_X_GYRO 0x00
#define ICM20_SELF_TEST_Y_GYRO 0x01
#define ICM20_SELF_TEST_Z_GYRO 0x02
#define ICM20_SELF_TEST_X_ACCEL 0x0D
#define ICM20_SELF_TEST_Y_ACCEL 0x0E
#define ICM20_SELF_TEST_Z_ACCEL 0x0F
/* 陀螺仪静态偏移 */
#define ICM20_XG_OFFS_USRH 0x13
#define ICM20_XG_OFFS_USRL 0x14
#define ICM20_YG_OFFS_USRH 0x15
#define ICM20_YG_OFFS_USRL 0x16
#define ICM20_ZG_OFFS_USRH 0x17
#define ICM20_ZG_OFFS_USRL 0x18
#define ICM20_SMPLRT_DIV 0x19
#define ICM20_CONFIG 0x1A
#define ICM20_GYRO_CONFIG 0x1B
#define ICM20_ACCEL_CONFIG 0x1C
#define ICM20_ACCEL_CONFIG2 0x1D
#define ICM20_LP_MODE_CFG 0x1E
#define ICM20_ACCEL_WOM_THR 0x1F
#define ICM20_FIFO_EN 0x23
#define ICM20_FSYNC_INT 0x36
#define ICM20_INT_PIN_CFG 0x37
#define ICM20_INT_ENABLE 0x38
#define ICM20_INT_STATUS 0x3A
/* 加速度输出 */
#define ICM20_ACCEL_XOUT_H 0x3B
#define ICM20_ACCEL_XOUT_L 0x3C
#define ICM20_ACCEL_YOUT_H 0x3D
#define ICM20_ACCEL_YOUT_L 0x3E
#define ICM20_ACCEL_ZOUT_H 0x3F
#define ICM20_ACCEL_ZOUT_L 0x40
/* 温度输出 */
#define ICM20_TEMP_OUT_H 0x41
#define ICM20_TEMP_OUT_L 0x42
/* 陀螺仪输出 */
#define ICM20_GYRO_XOUT_H 0x43
#define ICM20_GYRO_XOUT_L 0x44
#define ICM20_GYRO_YOUT_H 0x45
#define ICM20_GYRO_YOUT_L 0x46
#define ICM20_GYRO_ZOUT_H 0x47
#define ICM20_GYRO_ZOUT_L 0x48
#define ICM20_SIGNAL_PATH_RESET 0x68
#define ICM20_ACCEL_INTEL_CTRL 0x69
#define ICM20_USER_CTRL 0x6A
#define ICM20_PWR_MGMT_1 0x6B
#define ICM20_PWR_MGMT_2 0x6C
#define ICM20_FIFO_COUNTH 0x72
#define ICM20_FIFO_COUNTL 0x73
#define ICM20_FIFO_R_W 0x74
#define ICM20_WHO_AM_I 0x75
/* 加速度静态偏移 */
#define ICM20_XA_OFFSET_H 0x77
#define ICM20_XA_OFFSET_L 0x78
#define ICM20_YA_OFFSET_H 0x7A
#define ICM20_YA_OFFSET_L 0x7B
#define ICM20_ZA_OFFSET_H 0x7D
#define ICM20_ZA_OFFSET_L 0x7E
/*
* ICM20608结构体
*/
struct icm20608_dev_struc
{
signed int gyro_x_adc; /* 陀螺仪X轴原始值 */
signed int gyro_y_adc; /* 陀螺仪Y轴原始值 */
signed int gyro_z_adc; /* 陀螺仪Z轴原始值 */
signed int accel_x_adc; /* 加速度计X轴原始值 */
signed int accel_y_adc; /* 加速度计Y轴原始值 */
signed int accel_z_adc; /* 加速度计Z轴原始值 */
signed int temp_adc; /* 温度原始值 */
/* 下面是计算得到的实际值,扩大100倍 */
signed int gyro_x_act; /* 陀螺仪X轴实际值 */
signed int gyro_y_act; /* 陀螺仪Y轴实际值 */
signed int gyro_z_act; /* 陀螺仪Z轴实际值 */
signed int accel_x_act; /* 加速度计X轴实际值 */
signed int accel_y_act; /* 加速度计Y轴实际值 */
signed int accel_z_act; /* 加速度计Z轴实际值 */
signed int temp_act; /* 温度实际值 */
};
struct icm20608_dev_struc icm20608_dev; /* icm20608设备 */
icm20608.h定义了该模块的6轴数据寄存器地址和值。
连续顺序读写模块:前一个字节得写入寄存器地址,然后每次突发读取1字节数据,注意:这里不用每次都发送寄存器地址,顺序访问时,地址自动增长,即可顺序依次访问寄存器。如:向0x00~0x05地址依次发送6 byte数据,icm20608_read_len(0x00, buf, 6);
void icm20608_read_len(unsigned char reg, unsigned char *buf, unsigned char len)
{
unsigned char i;
/* ICM20608在使用SPI接口的时候寄存器地址,只有低7位有效,
* 寄存器地址最高位是读/写标志位读的时候要为1,写的时候要为0。
*/
reg |= 0x80;
ICM20608_CSN(0); /* 使能SPI传输 */
spich0_readwrite_byte(ECSPI3, reg); /* 发送寄存器地址 */
for(i = 0; i < len; i++) /* 顺序读取寄存器的值 */
{
buf[i] = spich0_readwrite_byte(ECSPI3, 0XFF);
}
ICM20608_CSN(1); /* 禁止SPI传输 */
}
icm20608_gyro_scaleget()和icm20608_accel_scaleget()是获取陀螺仪和加速度计的最小单位:
float icm20608_gyro_scaleget(void)
{
unsigned char data;
float gyroscale;
data = (icm20608_read_reg(ICM20_GYRO_CONFIG) >> 3) & 0X3;
switch(data) {
case 0:
gyroscale = 131;
break;
case 1:
gyroscale = 65.5;
break;
case 2:
gyroscale = 32.8;
break;
case 3:
gyroscale = 16.4;
break;
}
return gyroscale;
}
/*
* @description : 获取加速度计的分辨率
* @param : 无
* @return : 获取到的分辨率
*/
unsigned short icm20608_accel_scaleget(void)
{
unsigned char data;
unsigned short accelscale;
data = (icm20608_read_reg(ICM20_ACCEL_CONFIG) >> 3) & 0X3;
switch(data) {
case 0:
accelscale = 16384;
break;
case 1:
accelscale = 8192;
break;
case 2:
accelscale = 4096;
break;
case 3:
accelscale = 2048;
break;
}
return accelscale;
}
/*
* @description : 读取ICM20608的加速度、陀螺仪和温度原始值
* @param : 无
* @return : 无
*/
void icm20608_getdata(void)
{
float gyroscale;
unsigned short accescale;
unsigned char data[14];
icm20608_read_len(ICM20_ACCEL_XOUT_H, data, 14);
gyroscale = icm20608_gyro_scaleget();
accescale = icm20608_accel_scaleget();
icm20608_dev.accel_x_adc = (signed short)((data[0] << 8) | data[1]);
icm20608_dev.accel_y_adc = (signed short)((data[2] << 8) | data[3]);
icm20608_dev.accel_z_adc = (signed short)((data[4] << 8) | data[5]);
icm20608_dev.temp_adc = (signed short)((data[6] << 8) | data[7]);
icm20608_dev.gyro_x_adc = (signed short)((data[8] << 8) | data[9]);
icm20608_dev.gyro_y_adc = (signed short)((data[10] << 8) | data[11]);
icm20608_dev.gyro_z_adc = (signed short)((data[12] << 8) | data[13]);
/* 计算实际值 */
icm20608_dev.gyro_x_act = ((float)(icm20608_dev.gyro_x_adc) / gyroscale) * 100;
icm20608_dev.gyro_y_act = ((float)(icm20608_dev.gyro_y_adc) / gyroscale) * 100;
icm20608_dev.gyro_z_act = ((float)(icm20608_dev.gyro_z_adc) / gyroscale) * 100;
icm20608_dev.accel_x_act = ((float)(icm20608_dev.accel_x_adc) / accescale) * 100;
icm20608_dev.accel_y_act = ((float)(icm20608_dev.accel_y_adc) / accescale) * 100;
icm20608_dev.accel_z_act = ((float)(icm20608_dev.accel_z_adc) / accescale) * 100;
icm20608_dev.temp_act = (((float)(icm20608_dev.temp_adc) - 25 ) / 326.8 + 25) * 100;
}
由于前面设置的陀螺仪和加速度计量程都是拉满的设置的0x18,因此gyroscale读出来就是对应16.4(最小单位),accescale读出来就是对应2048(最小单位)
然后读出14 byte数据,组装成short类型数据,16位ADC, 一轴数据刚好16位数据。最后转成人眼直观的实际的陀螺仪和加速度计数据,放大了100倍,放大一百倍目的是为了能够将小数的部分也能记录下来。
以陀螺仪为例:量程位+-2000时,换算出16.4为1°。同理以加速度计为例:量程为+-16是,换算出2048为1g。
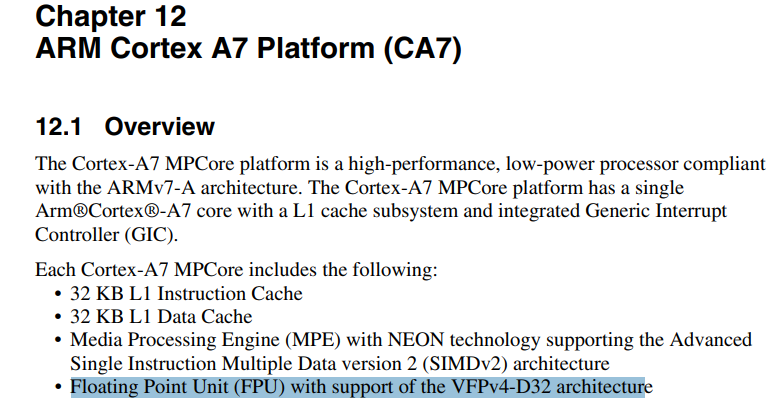
可以看到用到了浮点运算,那么IMX6ULL属于armv7,支持硬件浮点运算:执行浮点运算前调用imx6ul_hardfpu_enable()函数。
/*
* @description : 使能I.MX6U的硬件NEON和FPU
* @param : 无
* @return : 无
*/
void imx6ul_hardfpu_enable(void)
{
uint32_t cpacr;
uint32_t fpexc;
/* 使能NEON和FPU */
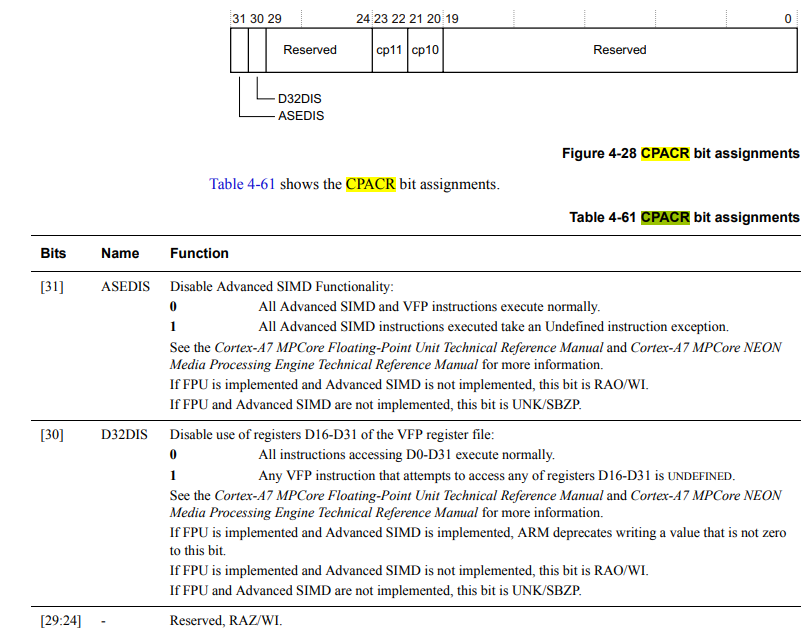
cpacr = __get_CPACR();
cpacr = (cpacr & ~(CPACR_ASEDIS_Msk | CPACR_D32DIS_Msk))
| (3UL << CPACR_cp10_Pos) | (3UL << CPACR_cp11_Pos);
__set_CPACR(cpacr);
fpexc = __get_FPEXC();
fpexc |= 0x40000000UL;
__set_FPEXC(fpexc);
}
打开Cortex-A7 MPCore Technical Reference Manual的4.3.34 Non-Secure Access Control Register介绍:开启硬件NEON和FPU
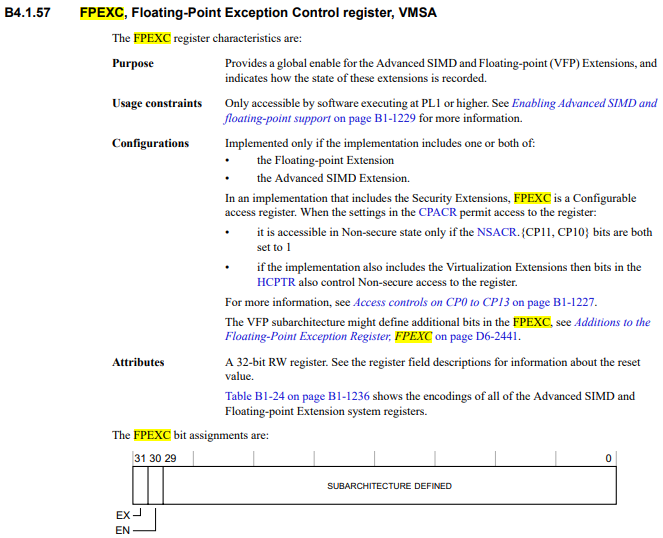
打开ARM®Architecture Reference Manual ARMv7-A and ARMv7-R edition介绍FPEXC寄存器, bit30置1,使能浮点运算

打开IM6ULL 参考手册:可见IMX6U支持浮点单元:
编译选项开启硬件浮点编译:
$(COBJS) : obj/%.o : %.c
$(CC) -Wall -march=armv7-a -mfpu=neon-vfpv4 -mfloat-abi=hard -Wa,-mimplicit-it=thumb -nostdlib -fno-builtin -c -O2 $(INCLUDE) -o $@ $<
效果:
/*
* @description : 指定的位置显示小数数据,比如5123,显示为51.23
* @param - x : X轴位置
* @param - y : Y轴位置
* @param - size: 字体大小
* @param - num : 要显示的数据,实际小数扩大100倍,
* @return : 无
*/
void decimals_display(unsigned short x, unsigned short y, unsigned char size, signed int num)
{
signed int integ; /* 整数部分 */
signed int fract; /* 小数部分 */
signed int uncomptemp = num;
char buf[200];
if(num < 0)
uncomptemp = -uncomptemp;
integ = uncomptemp / 100;
fract = uncomptemp % 100;
memset(buf, 0, sizeof(buf));
if(num < 0)
sprintf(buf, "-%d.%d", integ, fract);
else
sprintf(buf, "%d.%d", integ, fract);
lcd_fill(x, y, x + 60, y + size, tftlcd_dev.backcolor);
lcd_show_string(x, y, 60, size, size, buf);
}
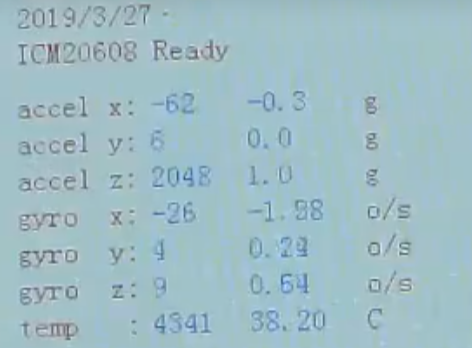
静止时,有一个z方向的加速度2048,也就是1g,刚好时重力加速度。静止时,陀螺仪几乎没有角速度,因此3轴数据都几乎为0°。
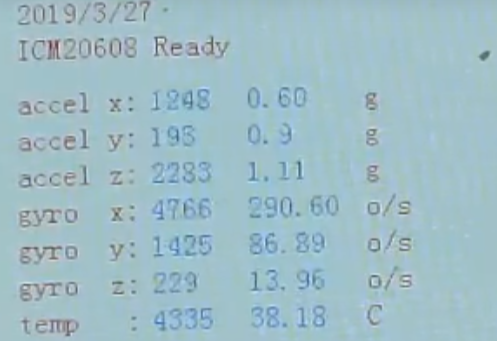
左右晃动时,陀螺仪数据明显增加。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号