

1 armv7 32位GICv2介绍
armv7 32位 gic采用v2版本,参考手册 https://developer.arm.com/documentation/ihi0048/bb/?lang=en


GIC400 就是v2版本的中断控制器 IP 核,当 GIC 接收到外部中断信号以后就会报给 ARM 内核。框架如下:

GIC 架构分为了两个逻辑块:Distributor 和 CPU Interface,也就是分发器端和 CPU 接口端。
1.0 分发器端和 CPU 接口端
-
分发器用来全局中断使能控制,每一个中断使能开关,中断优先级,外部中断触发方式(边沿触发、电平触发)等。外设->分发器会设置成
pending(或者active and pending状态),这时分发器传递优先级最高的pending中断给cpu 接收端。 -
cpu接收端用来接收中断信号汇报给cpu, 如:应答中断,通知中断处理完成,定义抢占策略,设置优先级掩码,当多个中断到来选择最高优先级的中断号。
例如:I.MX6U给了一个
core_ca7.h定义了GIC的所有寄存器。/* * GIC 寄存器描述结构体, * GIC 分为分发器端和 CPU 接口端 */ typedef struct { /* 分发器端寄存器 */ int32_t RESERVED0[1024]; _IOM uint32_t D_CTLR; /* Offset: 0x1000 (R/W) */ _IM uint32_t D_TYPER; /* Offset: 0x1004 (R/ ) */ _IM uint32_t D_IIDR; /* Offset: 0x1008 (R/ ) */ int32_t RESERVED1[29]; _IOM uint32_t D_IGROUPR[16]; /* Offset: 0x1080 - 0x0BC (R/W) */ uint32_t RESERVED2[16]; __IOM uint32_t D_ISENABLER[16];/* Offset: 0x1100 - 0x13C (R/W) */ uint32_t RESERVED3[16]; __IOM uint32_t D_ICENABLER[16];/* Offset: 0x1180 - 0x1BC (R/W) */ uint32_t RESERVED4[16]; __IOM uint32_t D_ISPENDR[16]; /* Offset: 0x1200 - 0x23C (R/W) */ uint32_t RESERVED5[16]; __IOM uint32_t D_ICPENDR[16]; /* Offset: 0x1280 - 0x2BC (R/W) */ uint32_t RESERVED6[16]; __IOM uint32_t D_ISACTIVER[16];/* Offset: 0x1300 - 0x33C (R/W) */ uint32_t RESERVED7[16]; __IOM uint32_t D_ICACTIVER[16];/* Offset: 0x1380 - 0x3BC (R/W) */ uint32_t RESERVED8[16]; __IOM uint8_t D_IPRIORITYR[512];/* Offset: 0x1400 - 0x5FC (R/W) */ uint32_t RESERVED9[128]; __IOM uint8_t D_ITARGETSR[512];/* Offset: 0x1800 - 0x9FC (R/W) */ uint32_t RESERVED10[128]; __IOM uint32_t D_ICFGR[32]; /* Offset: 0x1C00 - 0xC7C (R/W) */ uint32_t RESERVED11[32]; __IM uint32_t D_PPISR; /* Offset: 0x1D00 (R/ ) */ __IM uint32_t D_SPISR[15]; /* Offset: 0x1D04 - 0xD3C (R/ ) */ uint32_t RESERVED12[112]; __OM uint32_t D_SGIR; /* Offset: 0x1F00 ( /W) */ uint32_t RESERVED13[3]; __IOM uint8_t D_CPENDSGIR[16];/* Offset: 0x1F10 - 0xF1C (R/W) */ __IOM uint8_t D_SPENDSGIR[16];/* Offset: 0x1F20 - 0xF2C (R/W) */ uint32_t RESERVED14[40]; __IM uint32_t D_PIDR4; /* Offset: 0x1FD0 (R/ ) */ __IM uint32_t D_PIDR5; /* Offset: 0x1FD4 (R/ ) */ __IM uint32_t D_PIDR6; /* Offset: 0x1FD8 (R/ ) */ __IM uint32_t D_PIDR7; /* Offset: 0x1FDC (R/ ) */ __IM uint32_t D_PIDR0; /* Offset: 0x1FE0 (R/ ) */ __IM uint32_t D_PIDR1; /* Offset: 0x1FE4 (R/ ) */ __IM uint32_t D_PIDR2; /* Offset: 0x1FE8 (R/ ) */ __IM uint32_t D_PIDR3; /* Offset: 0x1FEC (R/ ) */ __IM uint32_t D_CIDR0; /* Offset: 0x1FF0 (R/ ) */ __IM uint32_t D_CIDR1; /* Offset: 0x1FF4 (R/ ) */ __IM uint32_t D_CIDR2; /* Offset: 0x1FF8 (R/ ) */ __IM uint32_t D_CIDR3; /* Offset: 0x1FFC (R/ ) */ /* CPU 接口端寄存器 */ __IOM uint32_t C_CTLR; /* Offset: 0x2000 (R/W) */ __IOM uint32_t C_PMR; /* Offset: 0x2004 (R/W) */ __IOM uint32_t C_BPR; /* Offset: 0x2008 (R/W) */ __IM uint32_t C_IAR; /* Offset: 0x200C (R/ ) */ __OM uint32_t C_EOIR; /* Offset: 0x2010 ( /W) */ __IM uint32_t C_RPR; /* Offset: 0x2014 (R/ ) */ __IM uint32_t C_HPPIR; /* Offset: 0x2018 (R/ ) */ __IOM uint32_t C_ABPR; /* Offset: 0x201C (R/W) */ __IM uint32_t C_AIAR; /* Offset: 0x2020 (R/ ) */ __OM uint32_t C_AEOIR; /* Offset: 0x2024 ( /W) */ __IM uint32_t C_AHPPIR; /* Offset: 0x2028 (R/ ) */ uint32_t RESERVED15[41]; __IOM uint32_t C_APR0; /* Offset: 0x20D0 (R/W) */ uint32_t RESERVED16[3]; __IOM uint32_t C_NSAPR0; /* Offset: 0x20E0 (R/W) */ uint32_t RESERVED17[6]; __IM uint32_t C_IIDR; /* Offset: 0x20FC (R/ ) */ uint32_t RESERVED18[960]; __OM uint32_t C_DIR; /* Offset: 0x3000 ( /W) */ } GIC_Type;
1.1 GIC 类型
GIC 将众多的中断源分为分为三类:
①、SPI(Shared Peripheral Interrupt),共享中断,顾名思义,所有 Core 共享的中断,这个是最常见的,那些外部中断都属于 SPI 中断 。
②、PPI(Private Peripheral Interrupt),私有中断,我们说了 GIC 是支持多核的,每个核肯定有自己独有的中断。这些独有的中断肯定是要指定的核心处理,因此这些中断就叫做私有中断。
③、SGI(Software-generated Interrupt),软件中断,由软件触发引起的中断,通过向寄存器GICD_SGIR 写入数据来触发,系统会使用 SGI 中断来完成多核之间的通信。
1.2 中断 ID
为了区分这些不同的中断源肯定要给他们分配一个唯一 ID,这些 ID 就是中断 ID。每一个 CPU 最多支持 1020 个中断 ID,ID0~ID1019 中断使能和禁止。这 1020 个 ID 包含了 PPI、SPI 和 SGI。
ID0~ID15:这 16 个 ID 分配给 SGI。
ID16~ID31:这 16 个 ID 分配给 PPI。
ID32~ID1019:这 988 个 ID 分配给 SPI。
例如:I.MX6U 的总共使用了 128 个中断 ID,加上前面属于 PPI 和 SGI 的 32 个 ID,I.MX6U 的中断源共有 128+32=160,那么irq为0的中断ID即为32。
个。NXP 官方 SDK中的文件 MCIMX6Y2C.h定义了160个中断ID。

#define NUMBER_OF_INT_VECTORS 160 /* 中断源 160 个,SGI+PPI+SPI*/
typedef enum IRQn {
/* Auxiliary constants */
otAvail_IRQn = -128,
/* Core interrupts */
oftware0_IRQn = 0,
oftware1_IRQn = 1,
Software2_IRQn = 2,
Software3_IRQn = 3,
Software4_IRQn = 4,
Software5_IRQn = 5,
Software6_IRQn = 6,
Software7_IRQn = 7,
Software8_IRQn = 8,
Software9_IRQn = 9,
Software10_IRQn = 10,
Software11_IRQn = 11,
Software12_IRQn = 12,
Software13_IRQn = 13,
Software14_IRQn = 14,
Software15_IRQn = 15,
VirtualMaintenance_IRQn = 25,
HypervisorTimer_IRQn = 26,
VirtualTimer_IRQn = 27,
LegacyFastInt_IRQn = 28,
SecurePhyTimer_IRQn = 29,
NonSecurePhyTimer_IRQn = 30,
LegacyIRQ_IRQn = 31,
/* Device specific interrupts */
IOMUXC_IRQn = 32,
DAP_IRQn = 33,
SDMA_IRQn = 34,
TSC_IRQn = 35,
SNVS_IRQn = 36,
...... ......
} IRQn_Type;
1.3 中断配置(1.7有详细描述)
1.3.1 IRQ 和 FIQ 总中断使能
"CPSR程序状态寄存器”已经讲过了,寄存器 CPSR 的 I=1 禁止 IRQ,当 I=0 使
能 IRQ;F=1 禁止 FIQ,F=0 使能 FIQ。我们还有更简单的指令来完成 IRQ 或者 FIQ 的使能和
禁止:
| 指令 | 描述 |
|---|---|
| cpsid i | 禁止 IRQ 中断。 |
| cpsie i | 使能 IRQ 中断。 |
| cpsid f | 禁止 FIQ 中断。 |
| cpsie f | 使能 FIQ 中断。 |
1.3.2 ID0~ID1019 中断使能和禁止
前面讲到中断ID有 ID0~ID1019, GIC 寄存器 GICD_ISENABLERn 和 GICD_ ICENABLERn 用来完成外部中断的使能和禁止,对于 Cortex-A7 内核来说中断 ID 只使用了 512 个。
一共16组GICD_ISENABLER和GICD_ISENABLER,其中GICD_ISENABLER0 的 bit[15:0]对应ID15~0 的 SGI 中断,GICD_ISENABLER0 的 bit[31:16]对应ID31~16的 PPI 中断。剩下的GICD_ISENABLER1~GICD_ISENABLER15 就是控制 SPI 中断的。
1.3.3 中断优先级数量 GICC_PMR
Cortex-A7 GIC 控制器最多可以支持 256 个优先级,数字越小,优先级越高!Cortex-A7 选择了 32 个优先级,GICC_PMR 寄存器,此寄存器用来决定使用几级优先级,GICC_PMR 寄存器只有低 8 位有效,这 8 位最多可以设置 256 个优先级:

I.MX6U 为例 Cortex-A7内核,所以支持 32 个优先级,因此 GICC_PMR 要设置为 0b11111000。
1.3.4 中断抢占优先级和子优先级位数 GICC_BPR
寄存器 GICC_BPR 只有低 3 位有效,其值不同,抢占优先级和子优先级占用的位数也不同:

比如 I.MX6U 的优先级位数为 5(32 个优先级),所以可以设置 Binary point 为 2,表示 5 个优先级位全部为抢占优先级。
1.3.5 中断priority D_IPRIORITYR
Cortex-A7 使用了 512 个中断 ID,每个中断 ID 配有一个优先级寄存器,所以一共有 512 个 D_IPRIORITYR 寄存器。如果优先级个数为 32 的话,使用寄存器 D_IPRIORITYR 的 bit7:4 来设置优先级,也就是说实际的优先级要左移 3 位。比如要设置ID40 中断的优先级为 5,示例代码如下:
GICD_IPRIORITYR[40] = 5 << 3;
1.4 中断状态机
① 非活动状态(Inactive):这意味着该中断未触发。
② 挂起(Pending):这意味着中断源已被触发,但正在等待CPU核处理。待处理的中断要通过转发到CPU接口单元,然后再由CPU接口单元转发到内核。
③ 活动(Active):描述了一个已被内核接收并正在处理的中断。
④ 活动和挂起(Active and pending):描述了一种情况,其中CPU核正在为中断服务,而GIC又收到来自同一源的中断。
1.5 GIC初始化硬件流程(软件流程见3.3)

1.6 GIC中断处理
当CPU核接收到中断时,cpu interface中有Interrupt Acknowledge Register可以读,获取中断ID。并且标记为active状态。
当对应的中断服务程序执行完,会将中断ID写入CPU interface模块中的End of Interrupt register。标记为inactive或pending(如果状态为inactive and pending)。
1.7 GIC控制器寄存器介绍
前面讲了GIC 架构分为了两个逻辑块:Distributor 和 CPU Interface,也就是分发器端和 CPU 接口端。
1.7.1 GIC的内存映射

GIC基地址偏移0x1000是分发器 block, 偏移0x2000是CPU 接口端 block。
1.7.1.1 分发器寄存器

1.7.1.1.1 GICD_CTLR(Distributor Control Register)
Distributor Control Register,分发器控制寄存器。

| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| 1 | EnableGrp1 | R/W | 用于将pending Group 1中断从Distributor转发到CPU interfaces 0:group 1中断不转发 1:根据优先级规则转发Group 1中断 |
| 0 | EnableGrp0 | R/W | 用于将pending Group 0中断从Distributor转发到CPU interfaces 0:group 0中断不转发 1:根据优先级规则转发Group 0中断 |
1.7.1.1.2 GICD_TYPER(Controller Type Register)

| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| 15:11 | LSPI | R | 如果GIC实现了安全扩展,则此字段的值是已实现的可锁定SPI的最大数量,范围为0(0b00000)到31(0b11111)。 如果此字段为0b00000,则GIC不会实现配置锁定。 如果GIC没有实现安全扩展,则保留该字段。 |
| 10 | SecurityExtn | R | 表示GIC是否实施安全扩展: 0未实施安全扩展; 1实施了安全扩展 |
| 7:5 | CPUNumber | R | 表示已实现的CPU interfaces的数量。 已实现的CPU interfaces数量比该字段的值大1。 例如,如果此字段为0b011,则有四个CPU interfaces。 |
| 4:0 | ITLinesNumber | R | 表示GIC支持的最大中断数。 如果ITLinesNumber = N,则最大中断数为32*(N+1)。 中断ID的范围是0到(ID的数量– 1)。 例如:0b00011最多128条中断线,中断ID 0-127。 中断的最大数量为1020(0b11111)。 无论此字段定义的中断ID的范围如何,都将中断ID 1020-1023保留用于特殊目的 |
1.7.1.1.3 GICD_IIDR(Implementer Identification Register)

| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| 31:24 | ProductID | R | 产品标识ID |
| 23:20 | 保留 | ||
| 19:16 | Variant | R | 通常是产品的主要版本号 |
| 15:12 | Revision | R | 通常此字段用于区分产品的次版本号 |
| 11:0 | Implementer | R | 含有实现这个GIC的公司的JEP106代码; [11:8]:JEP106 continuation code,对于ARM实现,此字段为0x4; [7]:始终为0; [6:0]:实现者的JEP106code,对于ARM实现,此字段为0x3B |
1.7.1.1.4 GICD_IGROUPRn(Group Registers)

| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| 31:0 | Group status bits | R/W | 组状态位,对于每个位: 0:相应的中断为Group 0; 1:相应的中断为Group 1。 |
对于一个中断,如何设置它的Group ?首先找到对应的GICD_IGROUPRn寄存器,即n是多少?还要确定使用这个寄存器里哪一位。
对于interrtups ID m,如下计算:
n = m DIV 32,GICD_IGROUPRn里的n就确定了;
GICD_IGROUPRn在GIC内部的偏移地址是多少?0x080+(4*n)
使用GICD_IPRIORITYRn中哪一位来表示interrtups ID m?
bit = m mod 32。
1.7.1.1.5 GICD_ISENABLERn(Set-Enable Registers)

| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| 31:0 | Set-enable bits | R/W | 对于SPI和PPI类型的中断,每一位控制对应中断的转发行为:从Distributor转发到CPU interface: 读: 0:表示当前是禁止转发的; 1:表示当前是使能转发的; 写: 0:无效 1:使能转发 |
对于一个中断,如何找到GICD_ISENABLERn并确定相应的位?
对于interrtups ID m,如下计算:
n = m DIV 32,GICD_ISENABLERn里的n就确定了;
GICD_ISENABLERn在GIC内部的偏移地址是多少?0x100+(4*n)
使用GICD_ISENABLERn中哪一位来表示interrtups ID m?
bit = m mod 32。
1.7.1.1.6 GICD_ICENABLERn(Clear-Enable Registers)

| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| 31:0 | Clear-enable bits | R/W | 对于SPI和PPI类型的中断,每一位控制对应中断的转发行为:从Distributor转发到CPU interface: 读: 0:表示当前是禁止转发的; 1:表示当前是使能转发的; 写: 0:无效 1:禁止转发 |
对于一个中断,如何找到GICD_ICENABLERn并确定相应的位?
对于interrtups ID m,如下计算:
n = m DIV 32,GICD_ISENABLERn里的n就确定了;
GICD_ISENABLERn在GIC内部的偏移地址是多少?0x100+(4*n)
使用GICD_ISENABLERn中哪一位来表示interrtups ID m?
bit = m mod 32。
1.7.1.1.7 GICD_ISACTIVERn(Set-Active Registers)

| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| 31:0 | Set-active bits | R/W | 读: 0:表示相应中断不是active状态; 1:表示相应中断是active状态; 写: 0:无效 1:把相应中断设置为active状态,如果中断已处于Active状态,则写入无效 |
对于一个中断,如何找到GICD_ISACTIVERn并确定相应的位?
对于interrtups ID m,如下计算:
n = m DIV 32,GICD_ISACTIVERn里的n就确定了;
GICD_ISACTIVERn在GIC内部的偏移地址是多少?0x300+(4*n)
使用GICD_ISACTIVERn 中哪一位来表示interrtups ID m?
bit = m mod 32。
1.7.1.1.8 GICD_ICACTIVERn(Clear-Active Registers)
| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| 31:0 | Clear-active bits | R/W | 读: 0:表示相应中断不是active状态; 1:表示相应中断是active状态; 写: 0:无效 1:把相应中断设置为deactive状态,如果中断已处于dective状态,则写入无效 |
对于一个中断,如何找到GICD_ICACTIVERn并确定相应的位?
对于interrtups ID m,如下计算:
n = m DIV 32,GICD_ICACTIVERn里的n就确定了;
GICD_ICACTIVERn 在GIC内部的偏移地址是多少?0x380+(4*n)
使用GICD_ICACTIVERn中哪一位来表示interrtups ID m?
bit = m mod 32。
1.7.1.1.9 GICD_IPRIORITYRn(Priority Registers)

| 位域 | 名 | 读写 | 描述 |
| 31:24 | Priority, byte offset 3 | R/W | 对于每一个中断,都有对应的8位数据用来描述:它的优先级。 每个优先级字段都对应一个优先级值,值越小,相应中断的优先级越高 |
| 23:16 | Priority, byte offset 2 | R/W | |
| 15:8 | Priority, byte offset 1 | R/W | |
| 7:0 | Priority, byte offset 0 | R/W |
如何设置它的优先级(Priority),首先找到对应的GICD_IPRIORITYRn寄存器,即n是多少?还要确定使用这个寄存器里哪一个字节。
对于interrtups ID m,如下计算:
n = m DIV 4,GICD_IPRIORITYRn里的n就确定了;
GICD_IPRIORITYRn在GIC内部的偏移地址是多少?0x400+(4*n)
使用GICD_IPRIORITYRn中4个字节中的哪一个来表示interrtups ID m的优先级?
byte offset = m mod 4。
byte offset 0对应寄存器里的[7:0];
byte offset 1对应寄存器里的[15:8];
byte offset 2对应寄存器里的[23:16];
byte offset 3对应寄存器里的[31:24]。
1.7.1.1.10 GICD_ITARGETSRn(Processor Targets Registers)

| 位域 | 名 | 读写 | 描述 |
| 31:24 | CPU targets, byte offset 3 | R/W | 对于每一个中断,都有对应的8位数据用来描述:这个中断可以发给哪些CPU。 处理器编号从0开始,8位数里每个位均指代相应的处理器。 例如,值0x3表示将中断发送到处理器0和1。 当读取GICD_ITARGETSR0~GICD_ITARGETSR7时,读取里面任意字节,返回的都是执行这个读操作的CPU的编号。 |
| 23:16 | CPU targets, byte offset 2 | R/W | |
| 15:8 | CPU targets, byte offset 1 | R/W | |
| 7:0 | CPU targets, byte offset 0 | R/W |
如何设置它的目杯CPU?优先级(Priority),首先找到对应的GICD_ITARGETSRn寄存器,即n是多少?还要确定使用这个寄存器里哪一个字节。
对于interrtups ID m,如下计算:
n = m DIV 4,GICD_ITARGETSRn里的n就确定了;
GICD_ITARGETSRn在GIC内部的偏移地址是多少?0x800+(4*n)
使用GICD_ITARGETSRn中4个字节中的哪一个来表示interrtups ID m的目标CPU?
byte offset = m mod 4。
byte offset 0对应寄存器里的[7:0];
byte offset 1对应寄存器里的[15:8];
byte offset 2对应寄存器里的[23:16];
byte offset 3对应寄存器里的[31:24]。
1.7.1.1.11 GICD_ICFGRn(Configuration Registers)

| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| [2F+1:2F] | Int_config, field F | R/W | 对于每一个中断,都有对应的2位数据用来描述:它的边沿触发,还是电平触发。 对于Int_config [1],即高位[2F + 1],含义为: 0:相应的中断是电平触发; 1:相应的中断是边沿触发。 对于Int_config [0],即低位[2F],是保留位。 |
如何找到GICD_ICFGRn并确定相应的位域F?
对于interrtups ID m,如下计算:
n = m DIV 16,GICD_ICFGRn里的n就确定了;
GICD_ICACTIVERn 在GIC内部的偏移地址是多少?0xC00+(4*n)
F = m mod 16。
1.7.1.1.12 ICPIDR2(Identification registers: Peripheral ID2 Register)

| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| [31:0] | - | R/W | 由实现定义 |
| [7:4] | ArchRev | R | 该字段的值取决于GIC架构版本: 0x1:GICv1; 0x2:GICv2。 |
| [3:0] | - | R/W | 由实现定义 |
1.7.1.2 cpu接口端寄存器

1.7.1.2.1 GICC_CTLR(CPU Interface Control Register)

| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| [31:10] | - | 保留 | |
| [9] | EOImodeNS | R/W | 控制对GICC_EOIR和GICC_DIR寄存器的非安全访问: 0:GICC_EOIR具有降低优先级和deactivate中断的功能; 对GICC_DIR的访问是未定义的。 1:GICC_EOIR仅具有降低优先级功能; GICC_DIR寄存器具有deactivate中断功能。 |
| [8:7] | - | 保留 | |
| [6] | IRQBypDisGrp1 | R/W | 当CPU interface的IRQ信号被禁用时,该位控制是否向处理器发送bypass IRQ信号: 0:将bypass IRQ信号发送给处理器; 1:将bypass IRQ信号不发送到处理器。 |
| [5] | FIQBypDisGrp1 | R/W | 当CPU interface的FIQ信号被禁用时,该位控制是否向处理器发送bypass FIQ信号: 0:将bypass FIQ信号发送给处理器; 1:旁路FIQ信号不发送到处理器 |
| [4:1] | - | 保留 | |
| [0] | - | R/W | 使能CPU interface向连接的处理器发出的组1中断的信号: 0:禁用中断信号 1:使能中断信号 |
1.7.1.2.2 GICC_PMR(Priority Mask Register)

| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| [31:8] | - | 保留 | |
| [7:0] | - | R/W | 优先级高于这个值的中断,才会发送给CPU |
[7:0]共8位,可以表示256个优先级。但是某些芯片里的GIC支持的优先级少于256个,则某些位为RAZ / WI,如下所示:
如果有128个级别,则寄存器中bit[0] = 0b0,即使用[7:1]来表示优先级;
如果有64个级别,则寄存器中bit[1:0] = 0b00,即使用[7:2]来表示优先级;
如果有32个级别,则寄存器中bit[2:0] = 0b000,即使用[7:3]来表示优先级;
如果有16个级别,则寄存器中bit[3:0] = 0b0000,即使用[7:4]来表示优先级;
1.7.1.2.3 GICC_BPR(Binary Point Register)
此寄存器用来把8位的优先级字段拆分为组优先级和子优先级,组优先级用来决定中断抢占。
| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| [31:3] | - | 保留 | |
| [2:0] | Binary point | R/W | 此字段的值控制如何将8bit中断优先级字段拆分为组优先级和子优先级,组优先级用来决定中断抢占。 更多信息还得看看GIC手册。 |
1.7.1.2.4 GICC_IAR(Acknowledge Register)
读此寄存器,获得当前中断的interrtup ID。
GICC_IAR寄存器描述来自《ARM Generic Interrupt Controller Architecture Specification.pdf》,它用来表示中断ID号。

处理完具体的中断处理函数,需要将GICC_IAR寄存器的值写入GICC_EOIR寄存器中。
| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| [31:13] | - | 保留 | |
| [12:10] | CPUID | R | 对于SGI类中断,它表示谁发出了中断。例如,值为3表示该请求是通过对CPU interface 3上的GICD_SGIR的写操作生成的。 |
| [9:0] | Interrupt ID | R | 中断ID |
1.7.1.2.5 GICC_EOIR(Interrupt Register)
写此寄存器,表示某中断已经处理完毕。GICC_IAR的值表示当前在处理的中断,把GICC_IAR的值写入GICC_EOIR就表示中断处理完了。

| 位域 | 名 | 读写 | 描述 |
|---|---|---|---|
| [31:13] | - | 保留 | |
| [12:10] | CPUID | W | 对于SGI类中断,它的值跟GICD_IAR. CPUID的相同。 |
| [9:0] | EOIINTID | W | 中断ID,它的值跟GICD_IAR里的中断ID相同 |
2. 中断示例start.s分析
以nxp的IMX6UL为例,SDK中core_ca7.h定了了GIC相关函数:
| 函数 | 描述 |
|---|---|
| GIC_Init | 初始化 GIC。 |
| GIC_EnableIRQ | 使能指定的外设中断。 |
| GIC_DisableIRQ | 关闭指定的外设中断。 |
| GIC_AcknowledgeIRQ | 返回中断号。 |
| GIC_DeactivateIRQ | 无效化指定中断。 |
| GIC_GetRunningPriority | 获取当前正在运行的中断优先级。 |
| GIC_SetPriorityGrouping | 设置抢占优先级位数。 |
| GIC_GetPriorityGrouping | 获取抢占优先级位数。 |
| GIC_SetPriority | 设置指定中断的优先级。 |
| GIC_GetPriority | 获取指定中断的优先级。 |
点击查看代码
.global _start /* 全局标号 */
_start:
ldr pc, =Reset_Handler /* 复位中断 */
ldr pc, =Undefined_Handler /* 未定义中断 */
ldr pc, =SVC_Handler /* SVC(Supervisor)中断 */
ldr pc, =PrefAbort_Handler /* 预取终止中断 */
ldr pc, =DataAbort_Handler /* 数据终止中断 */
ldr pc, =NotUsed_Handler /* 未使用中断 */
ldr pc, =IRQ_Handler /* IRQ中断 */
ldr pc, =FIQ_Handler /* FIQ(快速中断)未定义中断 */
/* 复位中断 */
Reset_Handler:
cpsid i /* 关闭全局中断 */
/* 关闭I,DCache和MMU
* 采取读-改-写的方式。
*/
mrc p15, 0, r0, c1, c0, 0 /* 读取CP15的C1寄存器到R0中 */
bic r0, r0, #(0x1 << 12) /* 清除C1寄存器的bit12位(I位),关闭I Cache */
bic r0, r0, #(0x1 << 2) /* 清除C1寄存器的bit2(C位),关闭D Cache */
bic r0, r0, #0x2 /* 清除C1寄存器的bit1(A位),关闭对齐 */
bic r0, r0, #(0x1 << 11) /* 清除C1寄存器的bit11(Z位),关闭分支预测 */
bic r0, r0, #0x1 /* 清除C1寄存器的bit0(M位),关闭MMU */
mcr p15, 0, r0, c1, c0, 0 /* 将r0寄存器中的值写入到CP15的C1寄存器中 */
#if 0
/* 汇编版本设置中断向量表偏移 */
ldr r0, =0X87800000
dsb
isb
mcr p15, 0, r0, c12, c0, 0
dsb
isb
#endif
/* 设置各个模式下的栈指针,
* 注意:IMX6UL的堆栈是向下增长的!
* 堆栈指针地址一定要是4字节地址对齐的!!!
* DDR范围:0X80000000~0X9FFFFFFF
*/
/* 进入IRQ模式 */
mrs r0, cpsr
bic r0, r0, #0x1f /* 将r0寄存器中的低5位清零,也就是cpsr的M0~M4 */
orr r0, r0, #0x12 /* r0或上0x13,表示使用IRQ模式 */
msr cpsr, r0 /* 将r0 的数据写入到cpsr_c中 */
ldr sp, =0x80600000 /* 设置IRQ模式下的栈首地址为0X80600000,大小为2MB */
/* 进入SYS模式 */
mrs r0, cpsr
bic r0, r0, #0x1f /* 将r0寄存器中的低5位清零,也就是cpsr的M0~M4 */
orr r0, r0, #0x1f /* r0或上0x13,表示使用SYS模式 */
msr cpsr, r0 /* 将r0 的数据写入到cpsr_c中 */
ldr sp, =0x80400000 /* 设置SYS模式下的栈首地址为0X80400000,大小为2MB */
/* 进入SVC模式 */
mrs r0, cpsr
bic r0, r0, #0x1f /* 将r0寄存器中的低5位清零,也就是cpsr的M0~M4 */
orr r0, r0, #0x13 /* r0或上0x13,表示使用SVC模式 */
msr cpsr, r0 /* 将r0 的数据写入到cpsr_c中 */
ldr sp, =0X80200000 /* 设置SVC模式下的栈首地址为0X80200000,大小为2MB */
cpsie i /* 打开全局中断 */
#if 0
/* 使能IRQ中断 */
mrs r0, cpsr /* 读取cpsr寄存器值到r0中 */
bic r0, r0, #0x80 /* 将r0寄存器中bit7清零,也就是CPSR中的I位清零,表示允许IRQ中断 */
msr cpsr, r0 /* 将r0重新写入到cpsr中 */
#endif
b main /* 跳转到main函数 */
/* 未定义中断 */
Undefined_Handler:
ldr r0, =Undefined_Handler
bx r0
/* SVC中断 */
SVC_Handler:
ldr r0, =SVC_Handler
bx r0
/* 预取终止中断 */
PrefAbort_Handler:
ldr r0, =PrefAbort_Handler
bx r0
/* 数据终止中断 */
DataAbort_Handler:
ldr r0, =DataAbort_Handler
bx r0
/* 未使用的中断 */
NotUsed_Handler:
ldr r0, =NotUsed_Handler
bx r0
/* IRQ中断!重点!!!!! */
IRQ_Handler:
push {lr} /* 保存lr地址 */
push {r0-r3, r12} /* 保存r0-r3,r12寄存器 */
mrs r0, spsr /* 读取spsr寄存器 */
push {r0} /* 保存spsr寄存器 */
mrc p15, 4, r1, c15, c0, 0 /* 从CP15的C0寄存器内的值到R1寄存器中
* 参考文档ARM Cortex-A(armV7)编程手册V4.0.pdf P49
* Cortex-A7 Technical ReferenceManua.pdf P68 P138
*/
add r1, r1, #0X2000 /* GIC基地址加0X2000,也就是GIC的CPU接口端基地址 */
ldr r0, [r1, #0XC] /* GIC的CPU接口端基地址加0X0C就是GICC_IAR寄存器,
* GICC_IAR寄存器保存这当前发生中断的中断号,我们要根据
* 这个中断号来绝对调用哪个中断服务函数
*/
push {r0, r1} /* 保存r0,r1 */
cps #0x13 /* 进入SVC模式,允许其他中断再次进去 */
push {lr} /* 保存SVC模式的lr寄存器 */
ldr r2, =system_irqhandler /* 加载C语言中断处理函数到r2寄存器中*/
blx r2 /* 运行C语言中断处理函数,带有一个参数,保存在R0寄存器中 */
pop {lr} /* 执行完C语言中断服务函数,lr出栈 */
cps #0x12 /* 进入IRQ模式 */
pop {r0, r1}
str r0, [r1, #0X10] /* 中断执行完成,写EOIR */
pop {r0}
msr spsr_cxsf, r0 /* 恢复spsr */
pop {r0-r3, r12} /* r0-r3,r12出栈 */
pop {lr} /* lr出栈 */
subs pc, lr, #4 /* 将lr-4赋给pc */
/* FIQ中断 */
FIQ_Handler:
ldr r0, =FIQ_Handler
bx r0
2.1 start.s启动流程
- 进入
_start,初始化异常向量表。进入复位中断,初始化时钟,关闭看门狗,关闭MMU和ICACHEDCACHE,关闭总中断 - 设置各个模式的
SP指针 - 代码段重定位到DDR上并且清bss段
- 开启总中断
- 跳转到C语言main函数执行
这里很多流程如代码重定位,清除bss,关闭看门狗等没有列举出来。
3 GIC中断处理流程
3.1 一级中断控制器流程

- 假设GIC可以向CPU发出
16-1019号中断,这些数字被称为hwirq。0-15用于Process之间通信,比较特殊。 - 假设要使用UART模块,它发出的中断连接到GIC的32号中断,分配的
irq_desc序号为16 - 在
GIC domain中会记录(32, 16) - 那么注册中断时就是:
request_irq(16, ...) - 发生UART中断时
- 程序从GIC中读取寄存器知道发生了32号中断,通过GIC
irq_domain可以知道virq为16 - 调用
irq_desc[16]中的handleA函数,它的作用是调用action链表中用户注册的函数.
- 程序从GIC中读取寄存器知道发生了32号中断,通过GIC
3.2 多级中断控制器流程

- 假设GPIO模块下有4个引脚,都可以产生中断,都连接到GIC的33号中断
- GPIO也可以看作一个中断控制器,对于它的4个中断
- 对于GPIO模块中
0~3这四个hwirq,一般都会一下子分配四个irq_desc - 假设这4个
irq_desc的序号为100~103,在GPIO domain中记录(0,100) (1,101)(2,102) (3,103) - 对于KEY,注册中断时就是:
request_irq(102, ...) - 按下KEY时:
- 程序从GIC中读取寄存器知道发生了33号中断,通过
GIC irq_domain可以知道virq为16. - 调用
irq_desc[16]中的handleB函数handleB读取GPIO寄存器,确定是GPIO里2号引脚发生中断- 通过GPIO
irq_domain可以知道virq为102 - 调用
irq_desc[102]中的handleA函数,它的作用是调用action链表中用户注册的函数
- 程序从GIC中读取寄存器知道发生了33号中断,通过
3.3 GIC软件初始化过程
start_kernel (init\main.c)
init_IRQ (arch\arm\kernel\irq.c)
irqchip_init (drivers\irqchip\irqchip.c)
of_irq_init (drivers\of\irq.c)//gic子系统
desc->irq_init_cb = match->data;
ret = desc->irq_init_cb(desc->dev,
desc->interrupt_parent);
3.3.1 gic驱动注册
内核支持多种GIC, 在内核为每一类GIC定义一个结构体of_device_id,并放在一个段里:
// drivers\irqchip\irq-gic.c
IRQCHIP_DECLARE(gic_400, "arm,gic-400", gic_of_init);
IRQCHIP_DECLARE(arm11mp_gic, "arm,arm11mp-gic", gic_of_init);
IRQCHIP_DECLARE(arm1176jzf_dc_gic, "arm,arm1176jzf-devchip-gic", gic_of_init);
IRQCHIP_DECLARE(cortex_a15_gic, "arm,cortex-a15-gic", gic_of_init);
IRQCHIP_DECLARE(cortex_a9_gic, "arm,cortex-a9-gic", gic_of_init);
IRQCHIP_DECLARE(cortex_a7_gic, "arm,cortex-a7-gic", gic_of_init);//imx6ull对应gic类型
IRQCHIP_DECLARE(msm_8660_qgic, "qcom,msm-8660-qgic", gic_of_init);
IRQCHIP_DECLARE(msm_qgic2, "qcom,msm-qgic2", gic_of_init);
IRQCHIP_DECLARE(pl390, "arm,pl390", gic_of_init);
IRQCHIP_DECLARE宏进行展开:
// include\linux\irqchip.h
#define IRQCHIP_DECLARE(name, compat, fn) OF_DECLARE_2(irqchip, name, compat, fn)
#define OF_DECLARE_2(table, name, compat, fn) \
_OF_DECLARE(table, name, compat, fn, of_init_fn_2)
#define _OF_DECLARE(table, name, compat, fn, fn_type) \
static const struct of_device_id __of_table_##name \
__used __section(__irqchip_of_table) \
= { .compatible = compat, \
.data = (fn == (fn_type)NULL) ? fn : fn }
例如:IRQCHIP_DECLARE(cortex_a7_gic, "arm,cortex-a7-gic", gic_of_init);展开后:
static const struct of_device_id __of_table_cortex_a7_gic \
__used __section(__irqchip_of_table) \
= { .compatible = "arm,cortex-a7-gic", \
.data = gic_of_init }
3.3.1.1 dts匹配

根据dts匹配调用IRQCHIP_DECLARE(cortex_a7_gic, "arm,cortex-a7-gic", gic_of_init);, 对irq chip driver 的声明。
定义 IRQCHIP_DECLARE 之后,相应的内容会保存到 __irqchip_of_table 里。__irqchip_of_table 在链接脚本 vmlinux.lds 里,被放到了__irqchip_begin和 __irqchip_of_end 之间,该段用于存放中断控制器信息。
3.3.1.2 gic_of_init(GIC驱动初始化入口)
gic_of_init内容太多,大致就是对中断控制器初始化:
-
初始化
GICD(分发器寄存器) -
初始化
GICC(cpu接口端寄存器) -
调用
gic_init_bases流程-
调用
set_handle_irq注册gic_handle_irq,异常处理的入口void __init set_handle_irq(void (*handle_irq)(struct pt_regs *)){ if (handle_arch_irq) return; handle_arch_irq = handle_irq; } static int __init gic_init_bases(void __iomem *dist_base, struct redist_region *rdist_regs, u32 nr_redist_regions, u64 redist_stride, struct fwnode_handle *handle) { set_handle_irq(gic_handle_irq); }
-
3.3.1.3 申请GIC中断
3.3.1.3.1 在设备树里指定中断

3.3.1.3.2 对设备树中断的处理
![image]
3.4 GIC中断处过程
- 进入中断栈
irq_stack_entry - 执行中断控制器的中断入口
handle_arch_irq - 退出中断栈
irq_stack_exit
中断栈用来保存中断的上下文,中断发生和退出的时候调用 irq_stack_entry 和 irq_stack_exit 来进入和退出中断栈。
3.4.1 handle_arch_irq入口

3.4.1.1 gic_handle_irq
static asmlinkage void __exception_irq_entry gic_handle_irq(struct pt_regs *regs){
u32 irqnr;
do {
irqnr = gic_read_iar(); ------(1)
if (likely(irqnr > 15 && irqnr < 1020) || irqnr >= 8192) { ------(2)
int err;
if (static_key_true(&supports_deactivate))
gic_write_eoir(irqnr);
else
isb();
err = handle_domain_irq(gic_data.domain, irqnr, regs); ------(3)
if (err) {
WARN_ONCE(true, "Unexpected interrupt received!\n");
if (static_key_true(&supports_deactivate)) {
if (irqnr < 8192)
gic_write_dir(irqnr);
} else {
gic_write_eoir(irqnr);
}
}
continue;
}
if (irqnr < 16) { ------(4)
gic_write_eoir(irqnr);
if (static_key_true(&supports_deactivate))
gic_write_dir(irqnr);
#ifdef CONFIG_SMP
/*
* Unlike GICv2, we don't need an smp_rmb() here.
* The control dependency from gic_read_iar to
* the ISB in gic_write_eoir is enough to ensure
* that any shared data read by handle_IPI will
* be read after the ACK.
*/
handle_IPI(irqnr, regs); ------(5)
#else
WARN_ONCE(true, "Unexpected SGI received!\n");
#endif
continue;
}
} while (irqnr != ICC_IAR1_EL1_SPURIOUS);
}
- 读取中断控制器的寄存器
GICC_IAR,并获取hwirq - 外设触发的中断。硬件中断号
0-15表示SGI (软件中断)类型的中断,15-1020表示外设中断(SPI或PPI共享中断类型),8192-MAX表示 LPI 类型的中断 - 中断控制器中断处理的主体
- 软件触发的中断
- 核间交互触发的中断
3.4.1.1.1 handle_domain_irq

- 进入中断上下文
- 根据
hwirq去查找 linux 中断号 - 通过中断号找到全局中断描述符数组
irq_desc[NR_IRQS]中的一项,然后调用generic_handle_irq_desc,执行该 irq 号注册的action - 退出中断上下文
3.4.1.1.1.1 generic_handle_irq
把generic_handle_irq展开:


调用 desc->handle_irq 指向的回调函数。

irq_domain_set_info 根据硬件中断号的范围设置 irq_desc->handle_irq 的指针,共享中断入口为 handle_fasteoi_irq,私有中断入口为 handle_percpu_devid_irq。
handle_percpu_devid_irq:处理私有中断处理,在这个过程中会分别调用中断控制器的处理函数进行硬件操作,该函数调用action->handler()来进行中断处理handle_fasteoi_irq:处理共享中断,并且遍历irqaction链表,逐个调用action->handler()函数,这个函数正是设备驱动程序调用request_irq/request_threaded_irq接口注册的中断处理函数,此外如果中断线程化处理的话,还会调用__irq_wake_thread唤醒内核线程。
irqreturn_t __handle_irq_event_percpu(struct irq_desc *desc, unsigned int *flags) {
irqreturn_t retval = IRQ_NONE;
unsigned int irq = desc->irq_data.irq;
struct irqaction *action;
for_each_action_of_desc(desc, action) {
irqreturn_t res;
res = action->handler(irq, action->dev_id);//requst_irq注册的函数
switch (res) {
case IRQ_WAKE_THREAD:
__irq_wake_thread(desc, action);
case IRQ_HANDLED:
*flags |= action->flags;
break;
}
}
...
}
3.4.1.1.2 总结request_irq的函数如何被执行

4 中断控制器GIC的设备树描述
中断控制器而言 ,设备树绑定信息参考文档Documentation/devicetree/bindings/arm/gic.txt。以nxp的imx6ull.dtsi为例:
intc: interrupt-controller@00a01000 {
compatible = "arm,cortex-a7-gic";
#interrupt-cells = <3>;
interrupt-controller;
reg = <0x00a01000 0x1000>,
<0x00a02000 0x100>;
};
compatible属性值为“arm,cortex-a7-gic”在 Linux 内核源码中搜索“arm,cortex-a7-gic”即可找到 GIC 中断控制器驱动文件, GIC 中断控制器驱是架构通用的,在drivers/irqchip/irq-gic.cinterrupt-cells和#address-cells、#size-cells一样。
2.1 每个 cells 都是 32 位整形值,对于 ARM 处理的GIC 来说,一共有 3 个 cells,这三个 cells 的含义如下:
第一个 cells:中断类型,0 表示 SPI(共享) 中断,1 表示 PPI(私有) 中断。
第二个 cells:中断号,对于 SPI 中断来说中断号的范围为 0~987,对于PPI 中断来说中断号的范围为 0~15。
第三个 cells:标志,bit[3:0]表示中断触发类型,为 1 的时候表示上升沿触发,为 2 的时候表示下降沿触发,为 4 的时候表示高电平触发,为 8 的时候表示低电平触发。bit[15:8]为 PPI 中断的 CPU 掩码。
interrupt-controller表示该节点中断控制器
对于gpio来说也可以作为中断控制器,如imx6ull的gpio5:

对于 gpio5 来说一共有两条信息,中断类型都是 SPI,
触发电平都是 IRQ_TYPE_LEVEL_HIGH。不同之处在于中断源,一个是 74,一个是 75,打开可以打开《IMX6ULL 参考手册》的“Chapter 3 Interrupts and DMA Events”章节:

GPIO5 一共用了 2 个中断号,一个是 74,一个是 75。其中 74 对应GPIO5_IO00~GPIO5_IO15这低 16 个 IO,75 对应 GPIO5_IO16~GPIOI5_IO31 这高 16 位 IO。
使用者:
fxls8471@1e {
compatible = "fsl,fxls8471";
reg = <0x1e>;
position = <0>;
interrupt-parent = <&gpio5>;
interrupts = <0 8>;
};
fxls8471 有一个中断引脚链接到了 I.MX6ULL 的SNVS_TAMPER0因脚上,这个引脚可以复用为GPIO5_IO00 interrupts设置中断信息,0 表示 GPIO5_IO00,8 表示低电平触发。
4.1 获取中断号函数
unsigned int irq_of_parse_and_map(struct device_node *dev,int index)
int gpio_to_irq(unsigned int gpio)
unsigned int irq_create_mapping(struct irq_domain *domain,
irq_hw_number_t hwirq);
irq_of_parse_and_map 函数从 interupts 属性中提取到对应的设备号,
dev:设备节点。
index:索引号,interrupts 属性可能包含多条中断信息,通过 index 指定要获取的信息。
返回值:中断号。
4.2 gic使用示例-按键gpio中断
4.2.1 dts描述
我们驱动一个按键,采用中断的方式,并且采用定时器来实现按键消抖,应用程序读取按键值并且通过终端打印出来:
key {
#size-cells = <1>;
compatible = "atkalpha-key";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_key>;
key-gpio = <&gpio1 18 GPIO_ACTIVE_LOW>; /* KEY0 */
interrupt-parent = <&gpio1>;
interrupts = <18 IRQ_TYPE_EDGE_BOTH>; /* FALLING RISING */
status = "okay";
};
可以看到key使用key-gpio使用GPIO1_IO18, 可以看到也用到了gpio中断源interrupts,IRQ_TYPE_EDGE_BOTH定义在include/linux/irq.h:
enum {
IRQ_TYPE_NONE = 0x00000000,
IRQ_TYPE_EDGE_RISING = 0x00000001,
IRQ_TYPE_EDGE_FALLING = 0x00000002,
IRQ_TYPE_EDGE_BOTH = (IRQ_TYPE_EDGE_FALLING |
IRQ_TYPE_EDGE_RISING),
IRQ_TYPE_LEVEL_HIGH = 0x00000004,
IRQ_TYPE_LEVEL_LOW = 0x00000008,
IRQ_TYPE_LEVEL_MASK = (IRQ_TYPE_LEVEL_LOW |
IRQ_TYPE_LEVEL_HIGH),
};
4.2.2 驱动代码与分析
驱动代码
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <linux/semaphore.h>
#include <linux/timer.h>
#include <linux/of_irq.h>
#include <linux/irq.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#define IMX6UIRQ_CNT 1 /* 设备号个数 */
#define IMX6UIRQ_NAME "imx6uirq" /* 名字 */
#define KEY0VALUE 0X01 /* KEY0按键值 */
#define INVAKEY 0XFF /* 无效的按键值 */
#define KEY_NUM 1 /* 按键数量 */
/* 中断IO描述结构体 */
struct irq_keydesc {
int gpio; /* gpio */
int irqnum; /* 中断号 */
unsigned char value; /* 按键对应的键值 */
char name[10]; /* 名字 */
irqreturn_t (*handler)(int, void *); /* 中断服务函数 */
};
/* imx6uirq设备结构体 */
struct imx6uirq_dev{
dev_t devid; /* 设备号 */
struct cdev cdev; /* cdev */
struct class *class; /* 类 */
struct device *device; /* 设备 */
int major; /* 主设备号 */
int minor; /* 次设备号 */
struct device_node *nd; /* 设备节点 */
atomic_t keyvalue; /* 有效的按键键值 */
atomic_t releasekey; /* 标记是否完成一次完成的按键,包括按下和释放 */
struct timer_list timer;/* 定义一个定时器*/
struct irq_keydesc irqkeydesc[KEY_NUM]; /* 按键描述数组 */
unsigned char curkeynum; /* 当前的按键号 */
};
struct imx6uirq_dev imx6uirq;
static irqreturn_t key0_handler(int irq, void *dev_id)
{
struct imx6uirq_dev *dev = (struct imx6uirq_dev *)dev_id;
dev->curkeynum = 0;
dev->timer.data = (volatile long)dev_id;
mod_timer(&dev->timer, jiffies + msecs_to_jiffies(10)); /* 10ms定时 */
return IRQ_RETVAL(IRQ_HANDLED);
}
void timer_function(unsigned long arg)
{
unsigned char value;
unsigned char num;
struct irq_keydesc *keydesc;
struct imx6uirq_dev *dev = (struct imx6uirq_dev *)arg;
num = dev->curkeynum;
keydesc = &dev->irqkeydesc[num];
value = gpio_get_value(keydesc->gpio); /* 读取IO值 */
if(value == 0){ /* 按下按键 */
atomic_set(&dev->keyvalue, keydesc->value);
}
else{ /* 按键松开 */
atomic_set(&dev->keyvalue, 0x80 | keydesc->value);
atomic_set(&dev->releasekey, 1); /* 标记松开按键,即完成一次完整的按键过程 */
}
}
static int keyio_init(void)
{
unsigned char i = 0;
int ret = 0;
imx6uirq.nd = of_find_node_by_path("/key");
if (imx6uirq.nd== NULL){
printk("key node not find!\r\n");
return -EINVAL;
}
for (i = 0; i < KEY_NUM; i++) {
imx6uirq.irqkeydesc[i].gpio = of_get_named_gpio(imx6uirq.nd ,"key-gpio", i);
if (imx6uirq.irqkeydesc[i].gpio < 0) {
printk("can't get key%d\r\n", i);
}
}
for (i = 0; i < KEY_NUM; i++) {
memset(imx6uirq.irqkeydesc[i].name, 0, sizeof(imx6uirq.irqkeydesc[i].name)); /* 缓冲区清零 */
sprintf(imx6uirq.irqkeydesc[i].name, "KEY%d", i); /* 组合名字 */
gpio_request(imx6uirq.irqkeydesc[i].gpio, imx6uirq.irqkeydesc[i].name);
gpio_direction_input(imx6uirq.irqkeydesc[i].gpio);
imx6uirq.irqkeydesc[i].irqnum = irq_of_parse_and_map(imx6uirq.nd, i);
#if 0
imx6uirq.irqkeydesc[i].irqnum = gpio_to_irq(imx6uirq.irqkeydesc[i].gpio);
#endif
printk("key%d:gpio=%d, irqnum=%d\r\n",i, imx6uirq.irqkeydesc[i].gpio,
imx6uirq.irqkeydesc[i].irqnum);
}
imx6uirq.irqkeydesc[0].handler = key0_handler;
imx6uirq.irqkeydesc[0].value = KEY0VALUE;
for (i = 0; i < KEY_NUM; i++) {
ret = request_irq(imx6uirq.irqkeydesc[i].irqnum, imx6uirq.irqkeydesc[i].handler,
IRQF_TRIGGER_FALLING|IRQF_TRIGGER_RISING, imx6uirq.irqkeydesc[i].name, &imx6uirq);
if(ret < 0){
printk("irq %d request failed!\r\n", imx6uirq.irqkeydesc[i].irqnum);
return -EFAULT;
}
}
init_timer(&imx6uirq.timer);
imx6uirq.timer.function = timer_function;
return 0;
}
static int imx6uirq_open(struct inode *inode, struct file *filp)
{
filp->private_data = &imx6uirq; /* 设置私有数据 */
return 0;
}
static ssize_t imx6uirq_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{
int ret = 0;
unsigned char keyvalue = 0;
unsigned char releasekey = 0;
struct imx6uirq_dev *dev = (struct imx6uirq_dev *)filp->private_data;
keyvalue = atomic_read(&dev->keyvalue);
releasekey = atomic_read(&dev->releasekey);
if (releasekey) { /* 有按键按下 */
if (keyvalue & 0x80) {
keyvalue &= ~0x80;
ret = copy_to_user(buf, &keyvalue, sizeof(keyvalue));
} else {
goto data_error;
}
atomic_set(&dev->releasekey, 0);/* 按下标志清零 */
} else {
goto data_error;
}
return 0;
data_error:
return -EINVAL;
}
static struct file_operations imx6uirq_fops = {
.owner = THIS_MODULE,
.open = imx6uirq_open,
.read = imx6uirq_read,
};
static int __init imx6uirq_init(void)
{
if (imx6uirq.major) {
imx6uirq.devid = MKDEV(imx6uirq.major, 0);
register_chrdev_region(imx6uirq.devid, IMX6UIRQ_CNT, IMX6UIRQ_NAME);
} else {
alloc_chrdev_region(&imx6uirq.devid, 0, IMX6UIRQ_CNT, IMX6UIRQ_NAME);
imx6uirq.major = MAJOR(imx6uirq.devid);
imx6uirq.minor = MINOR(imx6uirq.devid);
}
cdev_init(&imx6uirq.cdev, &imx6uirq_fops);
cdev_add(&imx6uirq.cdev, imx6uirq.devid, IMX6UIRQ_CNT);
imx6uirq.class = class_create(THIS_MODULE, IMX6UIRQ_NAME);
if (IS_ERR(imx6uirq.class)) {
return PTR_ERR(imx6uirq.class);
}
imx6uirq.device = device_create(imx6uirq.class, NULL, imx6uirq.devid, NULL, IMX6UIRQ_NAME);
if (IS_ERR(imx6uirq.device)) {
return PTR_ERR(imx6uirq.device);
}
atomic_set(&imx6uirq.keyvalue, INVAKEY);
atomic_set(&imx6uirq.releasekey, 0);
keyio_init();
return 0;
}
static void __exit imx6uirq_exit(void)
{
unsigned int i = 0;
del_timer_sync(&imx6uirq.timer);
for (i = 0; i < KEY_NUM; i++) {
free_irq(imx6uirq.irqkeydesc[i].irqnum, &imx6uirq);
gpio_free(imx6uirq.irqkeydesc[i].gpio);
}
cdev_del(&imx6uirq.cdev);
unregister_chrdev_region(imx6uirq.devid, IMX6UIRQ_CNT);
device_destroy(imx6uirq.class, imx6uirq.devid);
class_destroy(imx6uirq.class);
}
中断响应过程:


按键按下或松开,中断产生调用key0_handler,修改定时器超时10ms, 如果是抖动那么,定时器中断那么不会触发(原理请参考定时器中断),只有当不是抖动真正按下或松开,定时器中断触发进行读取按键,原子操作设置键值。releasekey置1表示一次完整的按下松开。

最后用户调用read, 返回键值。可见releasekey很好的控制着按键按下和read的次数,比如当连续read 2次但是只按了一次,则读取失败。

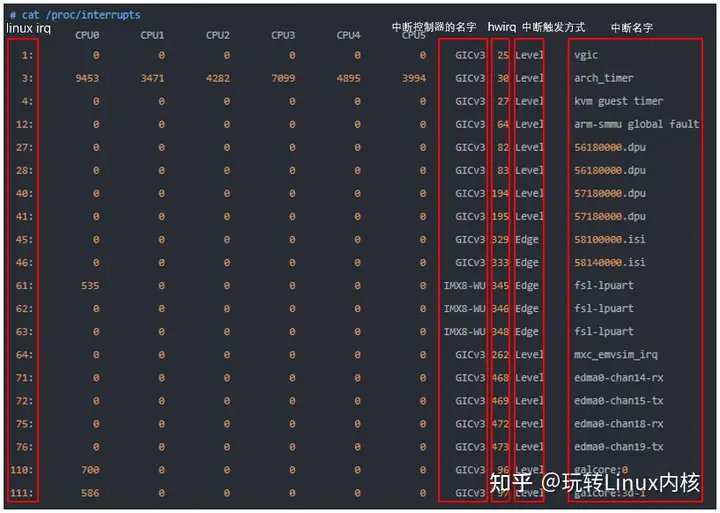
硬中断和虚拟中断号的映射关系可以用 /proc/interrupts 查看:
通过 ps 命令可以查看系统中的中断线程,注意这些线程是实时线程 SCHED_FIFO:
# ps -A | grep "irq/"
root 1749 2 0 0 irq_thread 0 S [irq/433-imx_drm]
root 1750 2 0 0 irq_thread 0 S [irq/439-imx_drm]
root 1751 2 0 0 irq_thread 0 S [irq/445-imx_drm]
root 1752 2 0 0 irq_thread 0 S [irq/451-imx_drm]
root 2044 2 0 0 irq_thread 0 S [irq/279-isl2902]
root 2192 2 0 0 irq_thread 0 S [irq/114-mmc0]
root 2199 2 0 0 irq_thread 0 S [irq/115-mmc1]
root 2203 2 0 0 irq_thread 0 S [irq/322-5b02000]
root 2361 2 0 0 irq_thread 0 S [irq/294-4-0051]


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· DeepSeek 开源周回顾「GitHub 热点速览」
· 记一次.NET内存居高不下排查解决与启示
· 物流快递公司核心技术能力-地址解析分单基础技术分享
· .NET 10首个预览版发布:重大改进与新特性概览!
· .NET10 - 预览版1新功能体验(一)