
1 引入定时器
前面的阻塞非阻塞IO, 休眠唤醒,poll查询,异步通知小结内容都是针对按键驱动为例进行的演示。
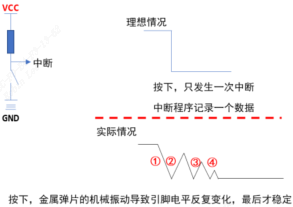
字符设备驱动-6-pre-休眠唤醒机制 | Hexo (fuzidage.github.io)引入了中断,当按键按下会记录按键信息,理想状况是按下一次按键记录一组数据,但实际上按下机械振动导致电平反复跳动最后才稳定,按下一次gpio irq会触发多次,这个被叫做“抖动”,那么可以利用定时器进行“去抖”。
1.0 定时器timer_list结构
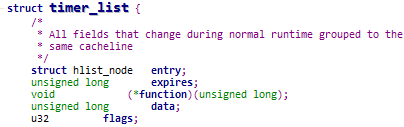
到linux_5.10版本struct timer_list变成了
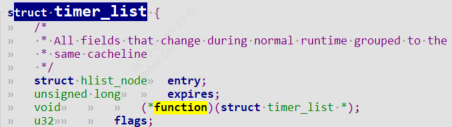
unsigned long expires; //设定的超时的值
void(*function)(unsigned long); //超时处理函数
unsigned long data; //超时处理函数参数
1.1 timer内核函数
在内核中使用定时器很简单,涉及这些函数(参考内核源码include\linux\timer.h)
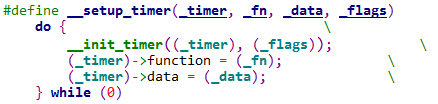
setup_timer(timer, fn, data)
![image]()
到linux_5.10版本变成了timer_setup

设置定时器,主要是初始化 timer_list 结构体,设置其中的函数、参数。
//还有一种用宏DEFINE_TIMER去定义和初始化一个timer_list
#define DEFINE_TIMER(_name, _function, _expires, _data) \
struct timer_list _name = \
TIMER_INITIALIZER(_function, _expires, _data)
#define __TIMER_INITIALIZER(_function, _expires, _data, _flags) { \
.entry = { .next = TIMER_ENTRY_STATIC }, \
.function = (_function), \
.expires = (_expires), \
.data = (_data), \
.flags = (_flags), \
__TIMER_LOCKDEP_MAP_INITIALIZER( \
__FILE__ ":" __stringify(__LINE__)) \
}
-
void add_timer(struct timer_list *timer)
![image]()
向内核添加定时器。timer->expires表示超时时间。
当超时时间到达 , 就会调用这个函数 :timer->function(timer->data)。 -
int mod_timer(struct timer_list *timer, unsigned long expires)
![image]()
修改定时器的超时时间:
它等同于:del_timer(timer); timer->expires = expires; add_timer(timer);但是更加高效。
-
int del_timer(struct timer_list *timer)
删除定时器。


1.2 定时器时间单位
可以在内核源码根目录下用“ ls -a”看到一个隐藏文件.config, 可以看到如下这项:会被内核转换成include/generated/autoconf.h,HZ定义头文件uapi/asm-generic/param.h和include/asm-generic/param.h
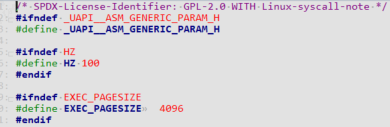
CONFIG_HZ=100
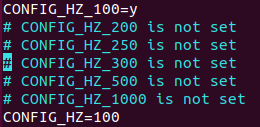
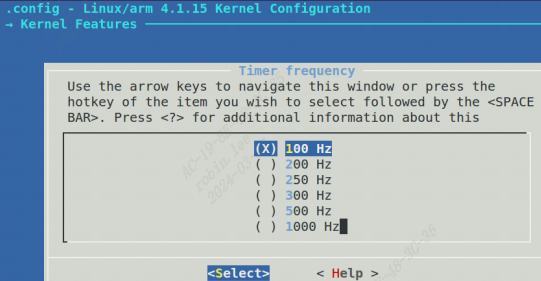
这表示内核每秒中会发生 100 次系统滴答中断(tick),这就像人类的心跳一样,这是 Linux 系统的心跳。每发生一次 tick 中断,全局变量 jiffies 就会累加 1。
CONFIG_HZ=100 表示每个滴答是 10ms。
定时器的时间就是基于jiffies的,我们修改超时时间时,一般使用这 2 种方法:
add_timer之前,直接修改:
imer.expires = jiffies + xxx; // xxx 表示多少个滴答后超时,也就是 xxx*10ms
imer.expires = jiffies + 2*HZ; // HZ 等于 CONFIG_HZ, 2*HZ HZ是100个10ms, 就相当于 2 秒add_timer之后,使用mod_timer修改:
mod_timer(&timer, jiffies + xxx); // xxx 表示多少个滴答后超时,也就是 xxx*10ms
mod_timer(&timer, jiffies + 2*HZ); // HZ 等于 CONFIG_HZ, 2*HZ 就相当于 2 秒
1.2.1 jiffies与秒的转换
将 jiffies转换为秒,可采用公式:(jiffies/HZ) 计算。
将秒转换为jiffies,可采用公式:(seconds*HZ) 计算。
1.2.2 内核时间获取
ktime_t curTime = 0;
curTime = ktime_get();//不包含了设备进入休眠的时间
TIME_TEST_INFO("ktime_get:%lld ns", curTime);
//结果:timeTest:ktime_drv_init,63:ktime_get:492257307974640 ns
ktime_t curTime = 0;
curTime = ktime_get_boottime();//包含了设备进入休眠的时间
TIME_TEST_INFO("ktime_get_boottime:%lld ns", curTime);
//结果: [492257.266168] timeTest:ktime_drv_init,73:ktime_get_boottime:581660801601637 ns
void ktime_get_ts64(struct timespec64 *ts); //这也是一种
ktime_t start, end, elapsed;
start = ktime_get_boottime();
...
end = ktime_get_boottime();
elapsed = ktime_sub(end, start);
elapsed_msecs = ktime_to_ms(elapsed);
printk("%d.%03d seconds", elapsed_msecs / 1000,elapsed_msecs % 1000);
1.2.2.1 秒-毫秒-微秒-纳秒和jiffies兑换
int jiffies_to_msecs(const unsigned long j);
int jiffies_to_usecs(const unsigned long j);
u64 jiffies_to_nsecs(const unsigned long j);
long msecs_to_jiffies(const unsigned int m);
long usecs_to_jiffies(const unsigned int u);//jiffies.h
unsigned long nsecs_to_jiffies(u64 n);
static inline s64 ktime_to_us(const ktime_t kt);//ktime.h
static inline s64 ktime_to_ms(const ktime_t kt);
static inline s64 ktime_to_ns(const ktime_t kt);
1.2.2.2 usleep_range
void __sched usleep_range(unsigned long min, unsigned long max);
1.2.3 CLOCK_MONOTONIC与CLOCK_REALTIME
CLOCK_MONOTONIC(即monotonic time)
CLOCK_MONOTONIC:以绝对时间为准,获取的时间为系统重启到现在的时间,更改系统时间对它没有影响。
字面意义:单调时间,表示系统启动后流逝的时间,由变量jiffies来记录的。
系统每次启动时,jiffies初始化为0。每来一个timer interrupt,jiffies加1,即它代表系统启动后流逝的tick数。
jiffies一定是单调递增的,因为时间不可逆。
CLOCK_REALTIME(即wall time)
CLOCK_REALTIME:相对时间,从1970.1.1到目前的时间。更改系统时间会更改获取的值。它以系统时间为坐标。
字面意思: wall time挂钟时间,表示现实的时间,由变量xtime来记录的。
一些题外话:
一些应用软件可能就是用到了这个wall time。比如以前用vmware workstation,一启动提示试用期已过,但是只要把系统时间调整一下提前一年,再启动就不会有提示了。这很可能就是因为它启动时,用gettimeofday去读wall time,然后判断是否过期,只要将wall time改一下,就可以欺骗过去了。
2 内核定时器实例
就前面讲到的gpio按键中断来举例,每次发生gpio 中断,irq中我们都去调用一次mod_timer函数判断是不是抖动带来的垃圾数据。如果是抖动,那么irq会一直触发,一直调用mod_timer,一直推迟定时器中断函数的触发。
当按下按键键值稳定下来后机械振动没了,电平数据趋于稳定了,那么gpio irq就不会一直响应了,也就是mod_timer函数不会一直调用了,那么等到timer超时,上报数据,整个流程如下图所示:
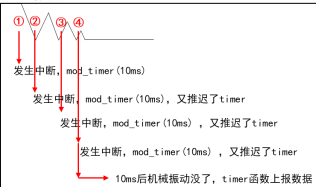
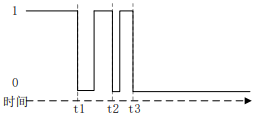
按键为下降沿触发,因此会在t1、t2 和 t3 这三个时刻会触发按键中断,每次进入中断处理函数都会重新开器定时器中断,但是 t1~t2 和t2~t3这两个时间段是小于我们设置的定时器中断周期(也就是消抖时间,比如 10ms),所以虽然 t1 开启了定时器,但是定时器定时时间还没到呢 t2 时刻就重置了定时器,最终只有 t3 时刻开启的定时器能完整的完成整个定时周期并触发中断,我们就可以在中断处理函数里面做按键处理了,这就是定时器实现按键防抖的原理。
驱动代码
#include <linux/module.h>
#include <linux/poll.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>
struct gpio_key{
int gpio;
struct gpio_desc *gpiod;
int flag;
int irq;
struct timer_list key_timer;
} ;
static struct gpio_key *gpio_keys_100ask;
static int major = 0;
static struct class *gpio_key_class;
/* 环形缓冲区 */
#define BUF_LEN 128
static int g_keys[BUF_LEN];
static int r, w;
struct fasync_struct *button_fasync;
#define NEXT_POS(x) ((x+1) % BUF_LEN)
static int is_key_buf_empty(void){
return (r == w);
}
static int is_key_buf_full(void){
return (r == NEXT_POS(w));
}
static void put_key(int key){
if (!is_key_buf_full()){
g_keys[w] = key;
w = NEXT_POS(w);
}
}
static int get_key(void){
int key = 0;
if (!is_key_buf_empty()){
key = g_keys[r];
r = NEXT_POS(r);
}
return key;
}
static DECLARE_WAIT_QUEUE_HEAD(gpio_key_wait);
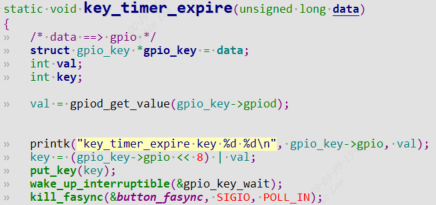
static void key_timer_expire(unsigned long data){
struct gpio_key *gpio_key = data;
int val;
int key;
val = gpiod_get_value(gpio_key->gpiod);
printk("key_timer_expire key %d %d\n", gpio_key->gpio, val);
key = (gpio_key->gpio << 8) | val;
put_key(key);
wake_up_interruptible(&gpio_key_wait);
kill_fasync(&button_fasync, SIGIO, POLL_IN);
}
static ssize_t gpio_key_drv_read (struct file *file, char __user *buf
, size_t size, loff_t *offset){
int err;
int key;
if (is_key_buf_empty() && (file->f_flags & O_NONBLOCK))
return -EAGAIN;
wait_event_interruptible(gpio_key_wait, !is_key_buf_empty());
key = get_key();
err = copy_to_user(buf, &key, 4);
return 4;
}
static unsigned int gpio_key_drv_poll(struct file *fp, poll_table * wait){
poll_wait(fp, &gpio_key_wait, wait);
return is_key_buf_empty() ? 0 : POLLIN | POLLRDNORM;
}
static int gpio_key_drv_fasync(int fd, struct file *file, int on){
if (fasync_helper(fd, file, on, &button_fasync) >= 0)
return 0;
else
return -EIO;
}
static struct file_operations gpio_key_drv = {
.owner = THIS_MODULE,
.read = gpio_key_drv_read,
.poll = gpio_key_drv_poll,
.fasync = gpio_key_drv_fasync,
};
static irqreturn_t gpio_key_isr(int irq, void *dev_id){
struct gpio_key *gpio_key = dev_id;
printk("gpio_key_isr key %d irq happened\n", gpio_key->gpio);
mod_timer(&gpio_key->key_timer, jiffies + HZ/5);
return IRQ_HANDLED;
}
static int gpio_key_probe(struct platform_device *pdev){
int err;
struct device_node *node = pdev->dev.of_node;
int count;
int i;
enum of_gpio_flags flag;
count = of_gpio_count(node);
if (!count){
printk("%s %s line %d, there isn't any gpio available\n", __FILE__, __FUNCTION__, __LINE__);
return -1;
}
gpio_keys_100ask = kzalloc(sizeof(struct gpio_key) * count, GFP_KERNEL);
for (i = 0; i < count; i++){
gpio_keys_100ask[i].gpio = of_get_gpio_flags(node, i, &flag);
if (gpio_keys_100ask[i].gpio < 0){
printk("%s %s line %d, of_get_gpio_flags fail\n", __FILE__, __FUNCTION__, __LINE__);
return -1;
}
gpio_keys_100ask[i].gpiod = gpio_to_desc(gpio_keys_100ask[i].gpio);
gpio_keys_100ask[i].flag = flag & OF_GPIO_ACTIVE_LOW;
gpio_keys_100ask[i].irq = gpio_to_irq(gpio_keys_100ask[i].gpio);
setup_timer(&gpio_keys_100ask[i].key_timer, key_timer_expire, &gpio_keys_100ask[i]);
gpio_keys_100ask[i].key_timer.expires = ~0;
add_timer(&gpio_keys_100ask[i].key_timer);
}
for (i = 0; i < count; i++){
err = request_irq(gpio_keys_100ask[i].irq, gpio_key_isr
, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING
, "100ask_gpio_key"
, &gpio_keys_100ask[i]);
}
major = register_chrdev(0, "100ask_gpio_key"
, &gpio_key_drv); /* /dev/gpio_key */
gpio_key_class = class_create(THIS_MODULE, "100ask_gpio_key_class");
if (IS_ERR(gpio_key_class)) {
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
unregister_chrdev(major, "100ask_gpio_key");
return PTR_ERR(gpio_key_class);
}
device_create(gpio_key_class
, NULL
, MKDEV(major, 0)
, NULL
, "100ask_gpio_key"); /* /dev/100ask_gpio_key */
return 0;
}
static int gpio_key_remove(struct platform_device *pdev){
struct device_node *node = pdev->dev.of_node;
int count;
int i;
device_destroy(gpio_key_class, MKDEV(major, 0));
class_destroy(gpio_key_class);
unregister_chrdev(major, "100ask_gpio_key");
count = of_gpio_count(node);
for (i = 0; i < count; i++){
free_irq(gpio_keys_100ask[i].irq, &gpio_keys_100ask[i]);
del_timer(&gpio_keys_100ask[i].key_timer);
}
kfree(gpio_keys_100ask);
return 0;
}
static const struct of_device_id ask100_keys[] = {
{ .compatible = "100ask,gpio_key" },
{ },
};
static struct platform_driver gpio_keys_driver = {
.probe = gpio_key_probe,
.remove = gpio_key_remove,
.driver = {
.name = "100ask_gpio_key",
.of_match_table = ask100_keys,
},
};
static int __init gpio_key_init(void){
return platform_driver_register(&gpio_keys_driver);
}
static void __exit gpio_key_exit(void){
platform_driver_unregister(&gpio_keys_driver);
}
module_init(gpio_key_init);
module_exit(gpio_key_exit);
MODULE_LICENSE("GPL");
2.2 实例源码分析

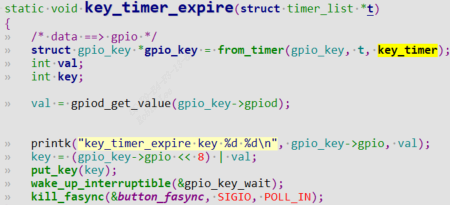
linux_5.10内核版本用法

probe函数进行初始化定时器,这里add_timer前修改expires,为了防止定时器中断提前触发(按键还没按下就触发了定时器中断),因此修改expires为一个最大值。

当按下按键gpio_irq按键中断服务程序响应后,调用mod_timer进行修改定时器超时时间,用来去除 “抖动”。jiffies + HZ/5表示延时20个tick时钟滴答,也就是20*10ms,如果这个时间内有多次电平跳动,那么不会去上报数据,而是继续修改定时器超时时间,直到按键数据稳定后,也就是200ms已经到了但是没有人去修改定时器超时时间,那么将会触发定时器中断,上报按键数据。
linux_5.10内核版本用法
3 深入理解定时器中断
3.1 提前引入硬件中断和软件中断
《后面中断子系统会专门介绍》设备驱动-10.中断子系统-1异常中断引入
- 硬件中断包含gpio,网卡,外围电路IP等等,
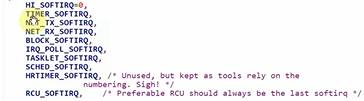
tick(产生一次tick系统滴答中断,jiffies加1) - 软件中断包含
TIMER表示定时中断、RCU 表示 RCU 锁中断、SCHED表示内核调度中断
区别:
上半部直接处理硬件请求,也就是硬中断,主要是负责耗时短的工作,特点是快速执行;
下半部是由内核触发,也就说软中断,主要是负责上半部未完成的工作,通常都是耗时比较长的事情,特点是延迟执行
硬中断(上半部)是会打断 CPU 正在执行的任务,然后立即执行中断处理程序,而软中断(下半部)是以内核线程的方式执行
cat /proc/softirqs可以看软件中断信息
cat /proc/interrupts可以看硬件中断
3.2 定时器底层原理
定时器就是通过软件中断来实现的,它属于 TIMER_SOFTIRQ 软中断
对于 TIMER_SOFTIRQ 软中断,内核启动时会调用start_kernel初始化init_timers(); 代码如下:
void __init init_timers(void) {
init_timer_cpus();
init_timer_stats();
open_softirq(TIMER_SOFTIRQ, run_timer_softirq);
}
当发生硬件中断时,硬件中断处理完后,内核会调用软件中断的处理函数。
对于 TIMER_SOFTIRQ,会调用 run_timer_softirq,它的函数如下:
run_timer_softirq
__run_timers(base);
while (time_after_eq(jiffies, base->clk)) {
……
expire_timers(base, heads + levels);
fn = timer->function;
data = timer->data;
call_timer_fn(timer, fn, data);
fn(data);
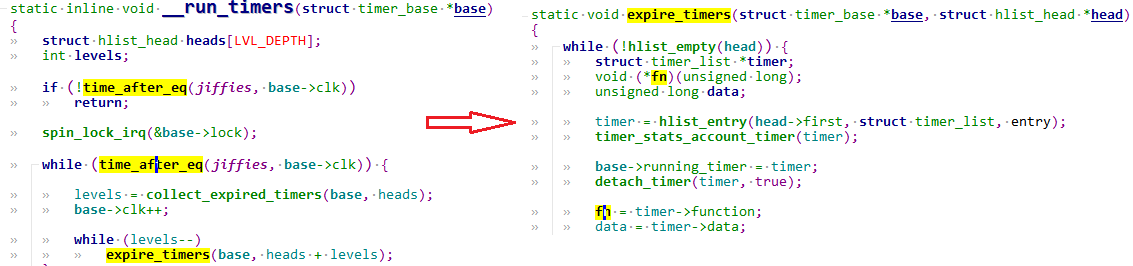
简单地说, add_timer 函数会把 timer 放入内核里某个链表;在 TIMER_SOFTIRQ 的处理函数run_timer_softirq中,会从链表中把这些超时的 timer 取出来,
执行其中的函数。怎么判断是否超时? jiffies 大于或等于 timer->expires 时, timer 就超时,执行超时处理函数。
3.3 找到自己芯片的时钟滴答数-jiffies
在开发板执行以下命令,可以看到 CPU0 下有一个数值变化特别快,它就是滴答中断tick,jiffies也叫做系统节拍数。
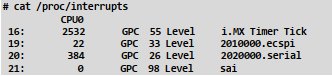
以 100ASK_IMX6ULL 为做,滴答中断名字就是“ i.MX Timer Tick”。在 Linux内核源码目录下执行以下命令:
grep "i.MX Timer Tick" * -nr
drivers/clocksource/timer-imx-gpt.c:319: act->name = "i.MX Timer Tick";
⚫ 打开 timer-imx-gpt.c 319 行左右,可得如下源码:
act->name = "i.MX Timer Tick";
act->flags = IRQF_TIMER | IRQF_IRQPOLL;
act->handler = mxc_timer_interrupt;
act->dev_id = ced;
return setup_irq(imxtm->irq, act);
⚫ mxc_timer_interrupt 应该就是滴答中断的处理函数,代码如下:
static irqreturn_t mxc_timer_interrupt(int irq, void *dev_id)
{
struct clock_event_device *ced = dev_id;
struct imx_timer *imxtm = to_imx_timer(ced);
uint32_t tstat;
tstat = readl_relaxed(imxtm->base + imxtm->gpt->reg_tstat);472 / 573
imxtm->gpt->gpt_irq_acknowledge(imxtm);
ced->event_handler(ced);
return IRQ_HANDLED;
}
在看ced->event_handler(ced);调用:
ced->event_handler(ced)是哪一个函数?不太好找,使用 QEMU 来调试内核,在 mxc_timer_interrupt 中打断点跟踪代码发现它对应 tick_handle_periodic。
tick_handle_periodic 位于 kernel\time\tick-common.c 中,它里面的调用关系如下:
tick_handle_periodic
tick_periodic(cpu);
do_timer(1);
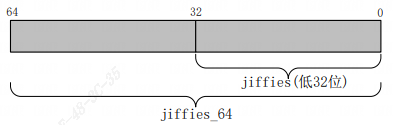
jiffies_64 += ticks; // jiffies 就是 jiffies_64
为何说jiffies就是 jiffies_64?在 arch\arm\kernel\vmlinux.lds.S 有如下代码:
#ifndef __ARMEB__
jiffies = jiffies_64;
#else
jiffies = jiffies_64 + 4;
#endif
上述代码说明了,对于大字节序的 CPU, jiffies 指向 jiffies_64 的高 4字节;对于小字节序的 CPU, jiffies 指向 jiffies_64 的低 4 字节。对 jiffies_64 的累加操作,就是对 jiffies 的累加操作。
extern u64 __cacheline_aligned_in_smp jiffies_64; //include/linux/jiffies.h
extern unsigned long volatile __cacheline_aligned_in_smp __jiffy_arch_data jiffies;

 浙公网安备 33010602011771号
浙公网安备 33010602011771号