
基于STM32的ModBus实现(一)移植FreeMODBUS RTU
一、FreeMODBUS
FreeModbus是一个开源的Modbus通信协议栈实现。它允许开发者在各种平台上轻松地实现Modbus通信功能,包括串口和以太网。FreeMODBUS提供了用于从设备和主站通信的功能,支持Modbus RTU和Modbus TCP协议。在工业控制和自动化领域广泛应用。
FreeModBus可通过官方网站下载:FreeMODBUS
下载到的文件如下:

- demo: 里面放置接口文件的模板和了一些示例代码
- doc: FreeModBus的说明文档
- modbus: modbus源码都在这个里面
- tools: 这个里面是测试modbus工具,不过还需要去下载一般不用,一般使用Modbus Poll工具调试ModBus。
二、STM32 移植ModBus RTU
移植ModBusRTU 比较简单,我这里也参考了别人写的博客STM32 移植FreeModbus详细过程,移植ModBusRTU的话看这一篇就够了,我这里也总结一下。
1、准备一个STM32的工程模板
工程模板最好是实现了串口通信,移植比较方便,我这里使用的单片机为STM32F407ZGT6,相应的串口和定时器的初始化与其他单片机(如STM32F103)略有不同。
2、将FreeModBus需要使用到的源文件添加到工程
modbus源文件的内容如下:
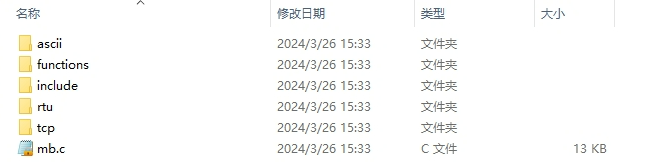
- ascii: ModBus ASCII源文件
- functions: ModBus源码函数文件
- include: 相关的头文件
- rtu: ModBus RTU文件
- tcp: ModBus TCP文件
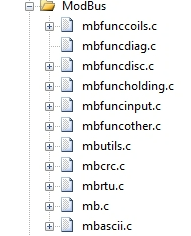
移植ModBus RTU需要将ascii、functions、rtu和mb.c文件添加到工程的modbus文件夹下(在工程中新建一个modbus文件夹)
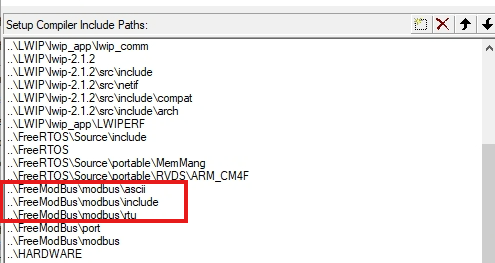
由于ascii、rtu中也有.h文件因此添加头文件路径时也要讲这两个文件夹加上
3、将接口文件的模板添加到工程并添加代码
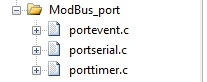
接口文件模板使用demo\BARE\port文件夹中的接口模板,将port文件夹复制到工程中的modbus文件夹下并将其添加到工程
3.1 portserial.c文件
接下来就是向接口文件portserial.c文件中添加代码了,代码如下:
portserial.c
/*
* FreeModbus Libary: BARE Port
* Copyright (C) 2006 Christian Walter <wolti@sil.at>
*
* This library is free software; you can redistribute it and/or
* modify it under the terms of the GNU Lesser General Public
* License as published by the Free Software Foundation; either
* version 2.1 of the License, or (at your option) any later version.
*
* This library is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
* Lesser General Public License for more details.
*
* You should have received a copy of the GNU Lesser General Public
* License along with this library; if not, write to the Free Software
* Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
*
* File: $Id$
*/
#include "port.h"
#include "stm32f4xx.h"
#include "USART1/usart1.h"
#include "stdio.h"
/* ----------------------- Modbus includes ----------------------------------*/
#include "mb.h"
#include "mbport.h"
/* ----------------------- static functions ---------------------------------*/
static void prvvUARTTxReadyISR( void );
static void prvvUARTRxISR( void );
/* ----------------------- Start implementation -----------------------------*/
void
vMBPortSerialEnable( BOOL xRxEnable, BOOL xTxEnable )
{
/* If xRXEnable enable serial receive interrupts. If xTxENable enable
* transmitter empty interrupts.
*/
//STM32串口接收中断使能
if(xRxEnable == TRUE)
{
//UART中断使能
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
}
else
{
//禁止接收和接收中断
USART_ITConfig(USART1, USART_IT_RXNE, DISABLE);
}
//STM32串口发送中断使能
if(xTxEnable == TRUE)
{
//使能发送中断
USART_ITConfig(USART1, USART_IT_TC, ENABLE);
}
else
{
//禁止发送中断
USART_ITConfig(USART1, USART_IT_TC, DISABLE);
}
}
BOOL
xMBPortSerialInit( UCHAR ucPORT, ULONG ulBaudRate, UCHAR ucDataBits, eMBParity eParity )
{
//串口初始化
USART1_Config((uint16_t)ulBaudRate);
USART1_NVIC();
return TRUE;
}
BOOL
xMBPortSerialPutByte( CHAR ucByte )
{
/* Put a byte in the UARTs transmit buffer. This function is called
* by the protocol stack if pxMBFrameCBTransmitterEmpty( ) has been
* called. */
//串口发送函数
USART_SendData(USART1, ucByte);
return TRUE;
}
BOOL
xMBPortSerialGetByte( CHAR * pucByte )
{
/* Return the byte in the UARTs receive buffer. This function is called
* by the protocol stack after pxMBFrameCBByteReceived( ) has been called.
*/
//串口接收函数
*pucByte = USART_ReceiveData(USART1);
return TRUE;
}
/* Create an interrupt handler for the transmit buffer empty interrupt
* (or an equivalent) for your target processor. This function should then
* call pxMBFrameCBTransmitterEmpty( ) which tells the protocol stack that
* a new character can be sent. The protocol stack will then call
* xMBPortSerialPutByte( ) to send the character.
*/
static void prvvUARTTxReadyISR( void )
{
pxMBFrameCBTransmitterEmpty( );
}
/* Create an interrupt handler for the receive interrupt for your target
* processor. This function should then call pxMBFrameCBByteReceived( ). The
* protocol stack will then call xMBPortSerialGetByte( ) to retrieve the
* character.
*/
static void prvvUARTRxISR( void )
{
pxMBFrameCBByteReceived( );
}
/**
* @brief This function handles usart1 Handler.
* @param None
* @retval None
*/
//串口中断函数
void USART1_IRQHandler(void)
{
//发生接收中断
if(USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
prvvUARTRxISR(); //串口接收中断调用函数
//清除中断标志位
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
if(USART_GetITStatus(USART1, USART_IT_ORE) == SET)
{
USART_ClearITPendingBit(USART1, USART_IT_ORE);
prvvUARTRxISR(); //串口发送中断调用函数
}
//发生完成中断
if(USART_GetITStatus(USART1, USART_IT_TC) == SET)
{
prvvUARTTxReadyISR();
//清除中断标志
USART_ClearITPendingBit(USART1, USART_IT_TC);
}
}
portserial.c文件主要封装了对串口的操作
vMBPortSerialEnable() 封装了接口(串口)的发送与接收使能\失能
xMBPortSerialInit() 接口(串口)的初始化
xMBPortSerialPutByte() 接口(串口)的发送函数
xMBPortSerialGetByte() 接口(串口)的接收函数
USART1_IRQHandler() 串口中断触发上面的接收与发送回调函数
调用的初始化函数如下
usart.c
#include "sys.h"
#include "USART1/usart1.h"
//初始化IO 串口1
//bound:波特率
void USART1_Config(uint16_t buad)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//使能USART1时钟
//串口1对应引脚复用映射
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); //GPIOA9复用为USART1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //GPIOA10复用为USART1
//USART1端口配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //GPIOA9与GPIOA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA9,PA10
//USART1 初始化设置
USART_InitStructure.USART_BaudRate = buad;//波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_Cmd(USART1, ENABLE); //使能串口1
}
void USART1_NVIC(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* 配置中断源 */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 5;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
usart.h
#ifndef __USART1_H
#define __USART1_H
#include "stm32f4xx_conf.h"
#include "sys.h"
void USART1_Config(uint16_t buad);
void USART1_NVIC(void);
#endif
3.2 porttimer.c
接下来修改porttimer.c文件,代码如下
porttimer.c
/*
* FreeModbus Libary: BARE Port
* Copyright (C) 2006 Christian Walter <wolti@sil.at>
*
* This library is free software; you can redistribute it and/or
* modify it under the terms of the GNU Lesser General Public
* License as published by the Free Software Foundation; either
* version 2.1 of the License, or (at your option) any later version.
*
* This library is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
* Lesser General Public License for more details.
*
* You should have received a copy of the GNU Lesser General Public
* License along with this library; if not, write to the Free Software
* Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
*
* File: $Id$
*/
/* ----------------------- Platform includes --------------------------------*/
#include "port.h"
#include "timer.h"
/* ----------------------- Modbus includes ----------------------------------*/
#include "mb.h"
#include "mbport.h"
/* ----------------------- static functions ---------------------------------*/
static void prvvTIMERExpiredISR( void );
/* ----------------------- Start implementation -----------------------------*/
BOOL
xMBPortTimersInit( USHORT usTim1Timerout50us )
{
TIM3_Init(usTim1Timerout50us);
return TRUE;
}
inline void
vMBPortTimersEnable( )
{
/* Enable the timer with the timeout passed to xMBPortTimersInit( ) */
TIM_ClearITPendingBit(TIM3, TIM_IT_Update);
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE);
TIM_SetCounter(TIM3,0x0000);
TIM_Cmd(TIM3, ENABLE);
}
inline void
vMBPortTimersDisable( )
{
/* Disable any pending timers. */
TIM_ClearITPendingBit(TIM3, TIM_IT_Update);
TIM_ITConfig(TIM3, TIM_IT_Update, DISABLE);
TIM_SetCounter(TIM3,0x0000);
TIM_Cmd(TIM3, DISABLE);
}
/* Create an ISR which is called whenever the timer has expired. This function
* must then call pxMBPortCBTimerExpired( ) to notify the protocol stack that
* the timer has expired.
*/
static void prvvTIMERExpiredISR( void )
{
( void )pxMBPortCBTimerExpired( );
}
void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET)
{
prvvTIMERExpiredISR();
TIM_ClearITPendingBit(TIM3, TIM_IT_Update);
}
}
porttimer.c文件主要是初始化定时器、使能、失能和中断后的时间更新,比较简单。
定时器初始化函数如下(也可以使用其他的定时器比如系统定时器):
timer.c
#include "timer.h"
#include "led.h"
//通用定时器3中断初始化
//arr:自动重装值。
//psc:时钟预分频数
//定时器溢出时间计算方法:Tout=((arr+1)*(psc+1))/Ft us.
//Ft=定时器工作频率,单位:Mhz
//这里使用的是定时器3!
void TIM3_Init(u16 period)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE); ///使能TIM3时钟
TIM_TimeBaseInitStructure.TIM_Prescaler=period; //定时器分频
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseInitStructure.TIM_Period=(16800-1); //自动重装载值
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);
// TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE); //允许定时器3更新中断
TIM_Cmd(TIM3,ENABLE); //使能定时器3
NVIC_InitStructure.NVIC_IRQChannel=TIM3_IRQn; //定时器3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority= 5; //抢占优先级0
NVIC_InitStructure.NVIC_IRQChannelSubPriority= 0; //子优先级15
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
timer.h
#ifndef _TIMER_H
#define _TIMER_H
#include "sys.h"
void TIM3_Init(u16 period);
#endif
4、定义各模拟寄存器的参数以及补全相关的寄存器操作函数
4.1 各模拟寄存器的参数
这些只是测试的参数,实际项目需要根据相关的IO、传感器实时更新参数。
Register configuration
/* ----------------------- Defines ------------------------------------------*/
//输入寄存器起始地址
#define REG_INPUT_START 0x0000
//输入寄存器数量
#define REG_INPUT_NREGS 8
//保持寄存器起始地址
#define REG_HOLDING_START 0x0000
//保持寄存器数量
#define REG_HOLDING_NREGS 8
//线圈起始地址
#define REG_COILS_START 0x0000
//线圈数量
#define REG_COILS_SIZE 16
//开关寄存器起始地址
#define REG_DISCRETE_START 0x0000
//开关寄存器数量
#define REG_DISCRETE_SIZE 16
/* Private variables ---------------------------------------------------------*/
//输入寄存器内容
uint16_t usRegInputBuf[REG_INPUT_NREGS] = {0x1000,0x1001,0x1002,0x1003,0x1004,0x1005,0x1006,0x1007};
//输入寄存器起始地址
uint16_t usRegInputStart = REG_INPUT_START;
//保持寄存器内容
uint16_t usRegHoldingBuf[REG_HOLDING_NREGS] = {0x147b,0x3f8e,0x147b,0x400e,0x1eb8,0x4055,0x147b,0x408e};
//保持寄存器起始地址
uint16_t usRegHoldingStart = REG_HOLDING_START;
//线圈状态
uint8_t ucRegCoilsBuf[REG_COILS_SIZE / 8] = {0x0f,0x02};
//开关输入状态
uint8_t ucRegDiscreteBuf[REG_DISCRETE_SIZE / 8] = {0x0f,0x02};
4.2 读取输入寄存器 eMBRegInputCB()
eMBRegInputCB()
/****************************************************************************
* 名 称:eMBRegInputCB
* 功 能:读取输入寄存器,对应功能码是 04 eMBFuncReadInputRegister
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 寄存器地址
* usNRegs: 要读取的寄存器个数
* 出口参数:
* 注 意:上位机发来的 帧格式是: SlaveAddr(1 Byte)+FuncCode(1 Byte)
* +StartAddrHiByte(1 Byte)+StartAddrLoByte(1 Byte)
* +LenAddrHiByte(1 Byte)+LenAddrLoByte(1 Byte)+
* +CRCAddrHiByte(1 Byte)+CRCAddrLoByte(1 Byte)
* 3 区
****************************************************************************/
eMBErrorCode
eMBRegInputCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs )
{
eMBErrorCode eStatus = MB_ENOERR;
int iRegIndex;
if( ( usAddress >= REG_INPUT_START )
&& ( usAddress + usNRegs <= REG_INPUT_START + REG_INPUT_NREGS ) )
{
iRegIndex = ( int )( usAddress - usRegInputStart );
while( usNRegs > 0 )
{
*pucRegBuffer++ = ( UCHAR )( usRegInputBuf[iRegIndex] >> 8 );
*pucRegBuffer++ = ( UCHAR )( usRegInputBuf[iRegIndex] & 0xFF );
iRegIndex++;
usNRegs--;
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}
4.3 保持寄存器操作函数 eMBRegHoldingCB()
eMBRegHoldingCB()
/****************************************************************************
* 名 称:eMBRegHoldingCB
* 功 能:对应功能码有:06 写保持寄存器 eMBFuncWriteHoldingRegister
* 16 写多个保持寄存器 eMBFuncWriteMultipleHoldingRegister
* 03 读保持寄存器 eMBFuncReadHoldingRegister
* 23 读写多个保持寄存器 eMBFuncReadWriteMultipleHoldingRegister
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 寄存器地址
* usNRegs: 要读写的寄存器个数
* eMode: 功能码
* 出口参数:
* 注 意:4 区
****************************************************************************/
eMBErrorCode
eMBRegHoldingCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs, eMBRegisterMode eMode )
{
eMBErrorCode eStatus = MB_ENOERR;
int iRegIndex;
if((usAddress >= REG_HOLDING_START)&&\
((usAddress+usNRegs) <= (REG_HOLDING_START + REG_HOLDING_NREGS)))
{
iRegIndex = (int)(usAddress - usRegHoldingStart);
switch(eMode)
{
case MB_REG_READ://读 MB_REG_READ = 0
while(usNRegs > 0)
{
*pucRegBuffer++ = (u8)(usRegHoldingBuf[iRegIndex] >> 8);
*pucRegBuffer++ = (u8)(usRegHoldingBuf[iRegIndex] & 0xFF);
iRegIndex++;
usNRegs--;
}
break;
case MB_REG_WRITE://写 MB_REG_WRITE = 0
while(usNRegs > 0)
{
usRegHoldingBuf[iRegIndex] = *pucRegBuffer++ << 8;
usRegHoldingBuf[iRegIndex] |= *pucRegBuffer++;
iRegIndex++;
usNRegs--;
}
}
}
else//错误
{
eStatus = MB_ENOREG;
}
return eStatus;
}
4.4 线圈操作函数 eMBRegCoilsCB()
eMBRegCoilsCB()
extern void xMBUtilSetBits( UCHAR * ucByteBuf, USHORT usBitOffset, UCHAR ucNBits,
UCHAR ucValue );
extern UCHAR xMBUtilGetBits( UCHAR * ucByteBuf, USHORT usBitOffset, UCHAR ucNBits );
/****************************************************************************
* 名 称:eMBRegCoilsCB
* 功 能:对应功能码有:01 读线圈 eMBFuncReadCoils
* 05 写线圈 eMBFuncWriteCoil
* 15 写多个线圈 eMBFuncWriteMultipleCoils
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 线圈地址
* usNCoils: 要读写的线圈个数
* eMode: 功能码
* 出口参数:
* 注 意:如继电器
* 0 区
****************************************************************************/
eMBErrorCode
eMBRegCoilsCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNCoils,
eMBRegisterMode eMode )
{
//错误状态
eMBErrorCode eStatus = MB_ENOERR;
//寄存器个数
int16_t iNCoils = ( int16_t )usNCoils;
//寄存器偏移量
int16_t usBitOffset;
//检查寄存器是否在指定范围内
if( ( (int16_t)usAddress >= REG_COILS_START ) &&
( usAddress + usNCoils <= REG_COILS_START + REG_COILS_SIZE ) )
{
//计算寄存器偏移量
usBitOffset = ( int16_t )( usAddress - REG_COILS_START );
switch ( eMode )
{
//读操作
case MB_REG_READ:
while( iNCoils > 0 )
{
*pucRegBuffer++ = xMBUtilGetBits( ucRegCoilsBuf, usBitOffset,
( uint8_t )( iNCoils > 8 ? 8 : iNCoils ) );
iNCoils -= 8;
usBitOffset += 8;
}
break;
//写操作
case MB_REG_WRITE:
while( iNCoils > 0 )
{
xMBUtilSetBits( ucRegCoilsBuf, usBitOffset,
( uint8_t )( iNCoils > 8 ? 8 : iNCoils ),
*pucRegBuffer++ );
iNCoils -= 8;
}
break;
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}
4.5 离散寄存器操作函数 eMBRegDiscreteCB()
eMBRegDiscreteCB()
/****************************************************************************
* 名 称:eMBRegDiscreteCB
* 功 能:读取离散寄存器,对应功能码有:02 读离散寄存器 eMBFuncReadDiscreteInputs
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 寄存器地址
* usNDiscrete: 要读取的寄存器个数
* 出口参数:
* 注 意:1 区
****************************************************************************/
eMBErrorCode
eMBRegDiscreteCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNDiscrete )
{
//错误状态
eMBErrorCode eStatus = MB_ENOERR;
//操作寄存器个数
int16_t iNDiscrete = ( int16_t )usNDiscrete;
//偏移量
uint16_t usBitOffset;
//判断寄存器时候再制定范围内
if( ( (int16_t)usAddress >= REG_DISCRETE_START ) &&
( usAddress + usNDiscrete <= REG_DISCRETE_START + REG_DISCRETE_SIZE ) )
{
//获得偏移量
usBitOffset = ( uint16_t )( usAddress - REG_DISCRETE_START );
while( iNDiscrete > 0 )
{
*pucRegBuffer++ = xMBUtilGetBits( ucRegDiscreteBuf, usBitOffset,
( uint8_t)( iNDiscrete > 8 ? 8 : iNDiscrete ) );
iNDiscrete -= 8;
usBitOffset += 8;
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}
5、FreeMODBUS源文件的一些修改
5.1、mbconfig.h文件
当前使用的为ModBus RTU 将默认的ModBus ASCII 取消
/*! \brief If Modbus ASCII support is enabled. */
#define MB_ASCII_ENABLED ( 0 )
/*! \brief If Modbus RTU support is enabled. */
#define MB_RTU_ENABLED ( 1 )
/*! \brief If Modbus TCP support is enabled. */
#define MB_TCP_ENABLED ( 0 )
/*! \brief The character timeout value for Modbus ASCII.
*
* The character timeout value is not fixed for Modbus ASCII and is therefore
* a configuration option. It should be set to the maximum expected delay
* time of the network.
*/
#define MB_ASCII_TIMEOUT_SEC ( 0 )
5.2、mbrtu.c文件
eMBRTUSend()
eMBErrorCode
eMBRTUSend( UCHAR ucSlaveAddress, const UCHAR * pucFrame, USHORT usLength )
{
eMBErrorCode eStatus = MB_ENOERR;
USHORT usCRC16;
ENTER_CRITICAL_SECTION( );
/* Check if the receiver is still in idle state. If not we where to
* slow with processing the received frame and the master sent another
* frame on the network. We have to abort sending the frame.
*/
if( eRcvState == STATE_RX_IDLE )
{
/* First byte before the Modbus-PDU is the slave address. */
pucSndBufferCur = ( UCHAR * ) pucFrame - 1;
usSndBufferCount = 1;
/* Now copy the Modbus-PDU into the Modbus-Serial-Line-PDU. */
pucSndBufferCur[MB_SER_PDU_ADDR_OFF] = ucSlaveAddress;
usSndBufferCount += usLength;
/* Calculate CRC16 checksum for Modbus-Serial-Line-PDU. */
usCRC16 = usMBCRC16( ( UCHAR * ) pucSndBufferCur, usSndBufferCount );
ucRTUBuf[usSndBufferCount++] = ( UCHAR )( usCRC16 & 0xFF );
ucRTUBuf[usSndBufferCount++] = ( UCHAR )( usCRC16 >> 8 );
/* Activate the transmitter. */
eSndState = STATE_TX_XMIT;
//修改了从这里往下
//启动第一次发送,这样才可以进入发送完成中断
xMBPortSerialPutByte( ( CHAR )*pucSndBufferCur );
pucSndBufferCur++; /* next byte in sendbuffer. */
usSndBufferCount--;
vMBPortSerialEnable( FALSE, TRUE );
}
else
{
eStatus = MB_EIO;
}
EXIT_CRITICAL_SECTION( );
return eStatus;
}
5.3 usRegAddress++ 的地址自增
以下文件中的usRegAddress++会导致读写是的地址自增,可以将以下文件中的usRegAddress++注释掉
mbfunccoils.c
mbfuncdisc.c
mbfuncholding.c
mbfuncinput.c
6、main.c函数中初始化并启动ModBus
接下来结束在main.c函数中启动modbus RTU了。
eMBInit() 初始化modbus
eMBEnable() 使能modbus
eMbPoll() 查询事件状态
printf("Err : %d\n",eMBInit(MB_RTU, 0x01, 0x01, 9600, MB_PAR_NONE));//初始化freemodbus 设置RTU模式和ID等
eMBEnable();
while(1)
{
eMBPoll();
vTaskDelay(10);
}
eMBInit()的原型为
eMBErrorCodeeMBInit( eMBMode eMode, UCHAR ucSlaveAddress, UCHAR ucPort, ULONG ulBaudRate, eMBParity eParity )
eMode: modbus模式 MB_RTU、MB_ASCII
ucSlaveAddress: 从机地址
ucPort: 连接的端口号(如串口连接电脑的端口号,当前测试被忽略了无效)
ulBaudRate: 连接串口的波特率
eParity: 校验方式(MB_PAR_NONE、MB_PAR_ODD、MB_PAR_EVEN)
我的程序使用的FreeRTOS操作系统,将查询事件作为一个线程,还有一个modbus输入寄存器更新的线程,用于在测试时能看到寄存器数据的变化。
注:main.c文件中的lwip、dp83848的相关文件是用于之后移植modbus TCP使用的,这些文件对当前的modbus RTU不会造成影响。
完整main.c文件如下
main.c
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "timer.h"
#include "lwip/timeouts.h"
#include "stm32f4x7_eth.h"
#include "DP83848.h"
#include "lwip_comm.h"
/*FreeModBus*/
#include "mb.h"
#include "mbutils.h"
#if SYSTEM_SUPPORT_OS
#include "FreeRTOS.h"
#include "task.h"
#endif /*SYSTEM_SUPPORT_OS*/
/* ----------------------- Defines ------------------------------------------*/
//输入寄存器起始地址
#define REG_INPUT_START 0x0000
//输入寄存器数量
#define REG_INPUT_NREGS 8
//保持寄存器起始地址
#define REG_HOLDING_START 0x0000
//保持寄存器数量
#define REG_HOLDING_NREGS 8
//线圈起始地址
#define REG_COILS_START 0x0000
//线圈数量
#define REG_COILS_SIZE 16
//开关寄存器起始地址
#define REG_DISCRETE_START 0x0000
//开关寄存器数量
#define REG_DISCRETE_SIZE 16
/* Private variables ---------------------------------------------------------*/
//输入寄存器内容
uint16_t usRegInputBuf[REG_INPUT_NREGS] = {0x1000,0x1001,0x1002,0x1003,0x1004,0x1005,0x1006,0x1007};
//输入寄存器起始地址
uint16_t usRegInputStart = REG_INPUT_START;
//保持寄存器内容
uint16_t usRegHoldingBuf[REG_HOLDING_NREGS] = {0x147b,0x3f8e,0x147b,0x400e,0x1eb8,0x4055,0x147b,0x408e};
//保持寄存器起始地址
uint16_t usRegHoldingStart = REG_HOLDING_START;
//线圈状态
uint8_t ucRegCoilsBuf[REG_COILS_SIZE / 8] = {0x0f,0x02};
//开关输入状态
uint8_t ucRegDiscreteBuf[REG_DISCRETE_SIZE / 8] = {0x0f,0x02};
/*开始任务*/
TaskHandle_t StartTask_Handler;
void start_task(void *pvParameters);
/*LED任务*/
TaskHandle_t LED0Task_Handler;
void led0_task(void *pvParameters);
/**************************FreeModBus******************************/
/*ModBus任务*/
TaskHandle_t ModBus_TASK_STK_Handler;
void ModBus_task(void *pvParameters);
/*ModBus输入任务*/
TaskHandle_t ModBus_Input_TASK_Handler;
void ModBus_Input_task(void *pvParameters);
/******************************************************************/
#if SYSTEM_SUPPORT_OS
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4); // 中断分组配置
delay_init(168); // 初始化延时函数
LED_Init();
uart_init(); // 初始化串口
printf("Err : %d\n",eMBInit(MB_RTU, 0x01, 0x01, 9600, MB_PAR_NONE));//初始化freemodbus 设置RTU模式和ID等
eMBEnable();
// 初始化LED端口
// TIM3_Int_Init(999, 839);
/*创建开始任务*/
xTaskCreate((TaskFunction_t )start_task, //任务函数
(const char* )"start_task", //任务名称
(uint16_t )256, //任务堆栈大小
(void* )NULL, //传递给任务函数的参数
(UBaseType_t )1, //任务优先级
(TaskHandle_t* )&StartTask_Handler); //任务句柄
/*开启任务调度*/
vTaskStartScheduler();
while (1)
{
// sys_check_timeouts();
}
}
/*开始任务任务函数*/
void start_task(void *pvParameters)
{
lwip_comm_init();
taskENTER_CRITICAL(); //进入临界区
//创建LED0任务
xTaskCreate((TaskFunction_t )led0_task,
(const char* )"led0_task",
(uint16_t )64,
(void* )NULL,
(UBaseType_t )2,
(TaskHandle_t* )&LED0Task_Handler);
//ModBus任务
xTaskCreate((TaskFunction_t )ModBus_task,
(const char* )"modbus_task",
(uint16_t )256,
(void* )NULL,
(UBaseType_t )3,
(TaskHandle_t* )&ModBus_TASK_STK_Handler);
//ModBus输入任务
xTaskCreate((TaskFunction_t )ModBus_Input_task,
(const char* )"modbus_input_task",
(uint16_t )256,
(void* )NULL,
(UBaseType_t )4,
(TaskHandle_t* )&ModBus_Input_TASK_Handler);
vTaskDelete(StartTask_Handler); //删除开始任务
taskEXIT_CRITICAL(); //退出临界区
}
/*LED0任务函数*/
void led0_task(void *pvParameters)
{
while(1)
{
LED0=~LED0;
vTaskDelay(500);
}
}
//ModBus任务
void ModBus_task(void *pdata)
{
while(1)
{
eMBPoll();
vTaskDelay(10);
}
}
//ModBus输入寄存器任务
void ModBus_Input_task(void *pdata)
{
while(1)
{
if(usRegInputBuf[0] > 0x1050)
{
usRegInputBuf[0] = 0x1000;
}
else
usRegInputBuf[0] = usRegInputBuf[0] + (u16)1;
vTaskDelay(1000);
}
}
/****************************************************************************
* 名 称:eMBRegInputCB
* 功 能:读取输入寄存器,对应功能码是 04 eMBFuncReadInputRegister
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 寄存器地址
* usNRegs: 要读取的寄存器个数
* 出口参数:
* 注 意:上位机发来的 帧格式是: SlaveAddr(1 Byte)+FuncCode(1 Byte)
* +StartAddrHiByte(1 Byte)+StartAddrLoByte(1 Byte)
* +LenAddrHiByte(1 Byte)+LenAddrLoByte(1 Byte)+
* +CRCAddrHiByte(1 Byte)+CRCAddrLoByte(1 Byte)
* 3 区
****************************************************************************/
eMBErrorCode
eMBRegInputCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs )
{
eMBErrorCode eStatus = MB_ENOERR;
int iRegIndex;
if( ( usAddress >= REG_INPUT_START )
&& ( usAddress + usNRegs <= REG_INPUT_START + REG_INPUT_NREGS ) )
{
iRegIndex = ( int )( usAddress - usRegInputStart );
while( usNRegs > 0 )
{
*pucRegBuffer++ = ( UCHAR )( usRegInputBuf[iRegIndex] >> 8 );
*pucRegBuffer++ = ( UCHAR )( usRegInputBuf[iRegIndex] & 0xFF );
iRegIndex++;
usNRegs--;
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}
/****************************************************************************
* 名 称:eMBRegHoldingCB
* 功 能:对应功能码有:06 写保持寄存器 eMBFuncWriteHoldingRegister
* 16 写多个保持寄存器 eMBFuncWriteMultipleHoldingRegister
* 03 读保持寄存器 eMBFuncReadHoldingRegister
* 23 读写多个保持寄存器 eMBFuncReadWriteMultipleHoldingRegister
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 寄存器地址
* usNRegs: 要读写的寄存器个数
* eMode: 功能码
* 出口参数:
* 注 意:4 区
****************************************************************************/
eMBErrorCode
eMBRegHoldingCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs, eMBRegisterMode eMode )
{
eMBErrorCode eStatus = MB_ENOERR;
int iRegIndex;
if((usAddress >= REG_HOLDING_START)&&\
((usAddress+usNRegs) <= (REG_HOLDING_START + REG_HOLDING_NREGS)))
{
iRegIndex = (int)(usAddress - usRegHoldingStart);
switch(eMode)
{
case MB_REG_READ://读 MB_REG_READ = 0
while(usNRegs > 0)
{
*pucRegBuffer++ = (u8)(usRegHoldingBuf[iRegIndex] >> 8);
*pucRegBuffer++ = (u8)(usRegHoldingBuf[iRegIndex] & 0xFF);
iRegIndex++;
usNRegs--;
}
break;
case MB_REG_WRITE://写 MB_REG_WRITE = 0
while(usNRegs > 0)
{
usRegHoldingBuf[iRegIndex] = *pucRegBuffer++ << 8;
usRegHoldingBuf[iRegIndex] |= *pucRegBuffer++;
iRegIndex++;
usNRegs--;
}
}
}
else//错误
{
eStatus = MB_ENOREG;
}
return eStatus;
}
extern void xMBUtilSetBits( UCHAR * ucByteBuf, USHORT usBitOffset, UCHAR ucNBits,
UCHAR ucValue );
extern UCHAR xMBUtilGetBits( UCHAR * ucByteBuf, USHORT usBitOffset, UCHAR ucNBits );
/****************************************************************************
* 名 称:eMBRegCoilsCB
* 功 能:对应功能码有:01 读线圈 eMBFuncReadCoils
* 05 写线圈 eMBFuncWriteCoil
* 15 写多个线圈 eMBFuncWriteMultipleCoils
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 线圈地址
* usNCoils: 要读写的线圈个数
* eMode: 功能码
* 出口参数:
* 注 意:如继电器
* 0 区
****************************************************************************/
eMBErrorCode
eMBRegCoilsCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNCoils,
eMBRegisterMode eMode )
{
//错误状态
eMBErrorCode eStatus = MB_ENOERR;
//寄存器个数
int16_t iNCoils = ( int16_t )usNCoils;
//寄存器偏移量
int16_t usBitOffset;
//检查寄存器是否在指定范围内
if( ( (int16_t)usAddress >= REG_COILS_START ) &&
( usAddress + usNCoils <= REG_COILS_START + REG_COILS_SIZE ) )
{
//计算寄存器偏移量
usBitOffset = ( int16_t )( usAddress - REG_COILS_START );
switch ( eMode )
{
//读操作
case MB_REG_READ:
while( iNCoils > 0 )
{
*pucRegBuffer++ = xMBUtilGetBits( ucRegCoilsBuf, usBitOffset,
( uint8_t )( iNCoils > 8 ? 8 : iNCoils ) );
iNCoils -= 8;
usBitOffset += 8;
}
break;
//写操作
case MB_REG_WRITE:
while( iNCoils > 0 )
{
xMBUtilSetBits( ucRegCoilsBuf, usBitOffset,
( uint8_t )( iNCoils > 8 ? 8 : iNCoils ),
*pucRegBuffer++ );
iNCoils -= 8;
}
break;
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}
/****************************************************************************
* 名 称:eMBRegDiscreteCB
* 功 能:读取离散寄存器,对应功能码有:02 读离散寄存器 eMBFuncReadDiscreteInputs
* 入口参数:pucRegBuffer: 数据缓存区,用于响应主机
* usAddress: 寄存器地址
* usNDiscrete: 要读取的寄存器个数
* 出口参数:
* 注 意:1 区
****************************************************************************/
eMBErrorCode
eMBRegDiscreteCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNDiscrete )
{
//错误状态
eMBErrorCode eStatus = MB_ENOERR;
//操作寄存器个数
int16_t iNDiscrete = ( int16_t )usNDiscrete;
//偏移量
uint16_t usBitOffset;
//判断寄存器时候再制定范围内
if( ( (int16_t)usAddress >= REG_DISCRETE_START ) &&
( usAddress + usNDiscrete <= REG_DISCRETE_START + REG_DISCRETE_SIZE ) )
{
//获得偏移量
usBitOffset = ( uint16_t )( usAddress - REG_DISCRETE_START );
while( iNDiscrete > 0 )
{
*pucRegBuffer++ = xMBUtilGetBits( ucRegDiscreteBuf, usBitOffset,
( uint8_t)( iNDiscrete > 8 ? 8 : iNDiscrete ) );
iNDiscrete -= 8;
usBitOffset += 8;
}
}
else
{
eStatus = MB_ENOREG;
}
return eStatus;
}
6、连接电脑使用ModBus Poll 软件进行测试
在程序编译没问题后使用ModBus Poll软件进行ModBus 通讯测试。
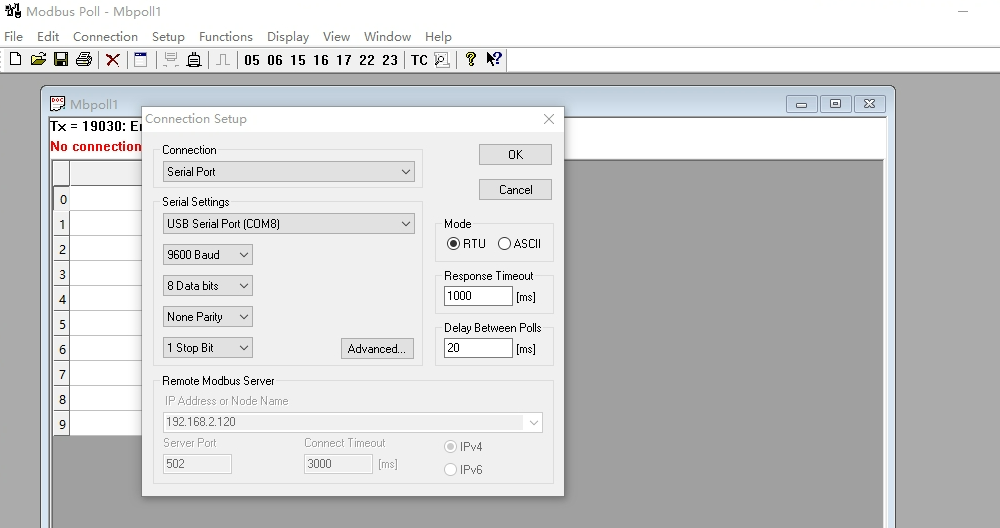
使用串口转usb模块将串口连接到电脑,打开ModBus Poll软件,点击connection配置如下:
Connection : Serial Port
Serial Setting : COMx(当前连接的端口)
Baud : 9600 (Modbus初始化时的参数)
其他如下图,配置完成后OK
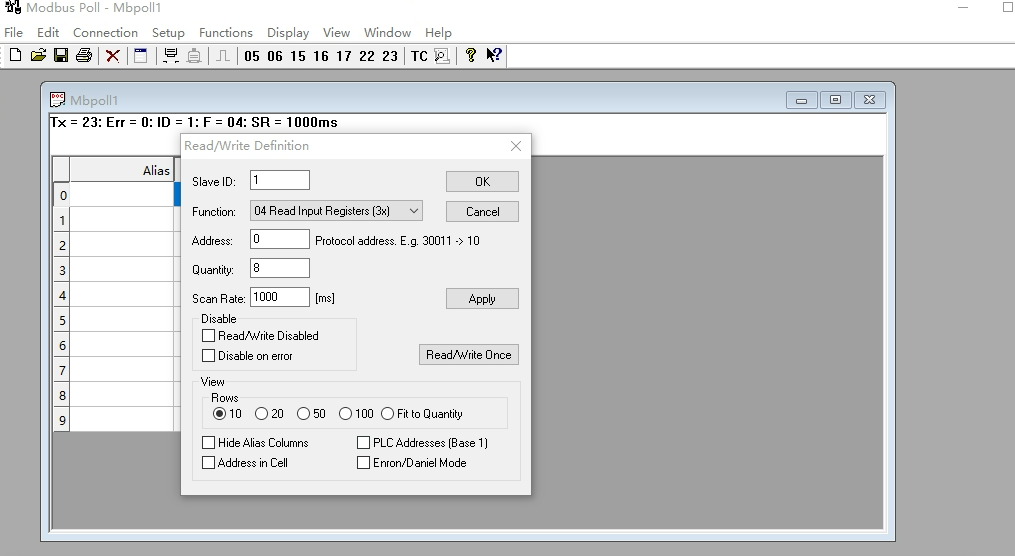
选择Setup-Read/Write Definition
SlaveID : 初始化时的从机地址(本例配置为 0x01)
Function : 04 Read Input Registers (读取输入寄存器,我们添加了一个更新输入寄存器的线程,读取时会看到相关数据的变化)
Address : 起始地址,代码中配置为0x0000
Quantity : 读取的寄存器数量(不能超过程序中配置的数量8)
其他参数如下图
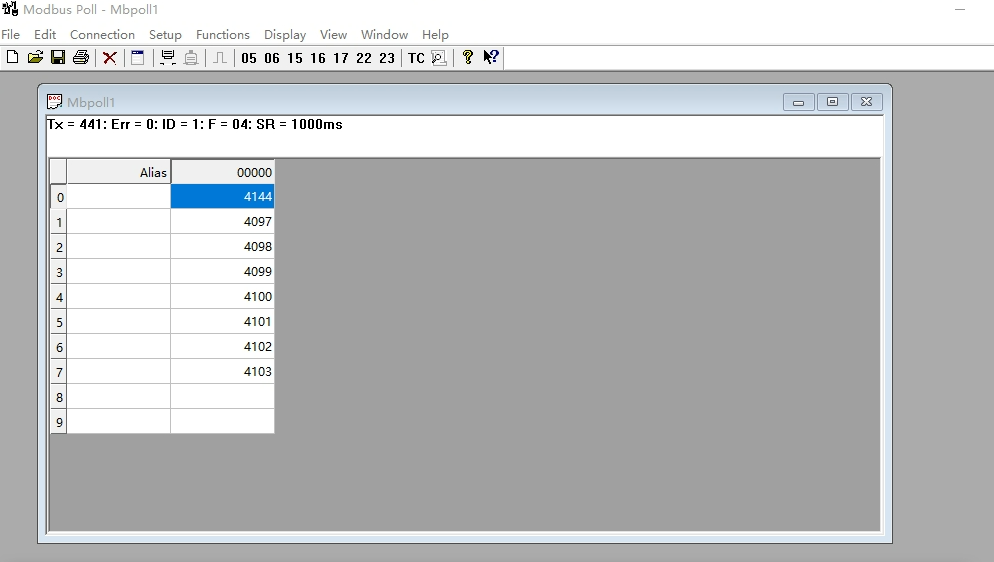
配置完成后会自动读取相关寄存器的值如下
7、ending
本节完成了STM32 移植ModBus RTU,会在下一章实现 STM32 + Lwip2.1.2 + DP83848 + FreeRTOS + ModBus TCP的移植。
本文作者:fyxs
本文链接:https://www.cnblogs.com/fuyunxiansen/p/18099998
版权声明:本作品采用知识共享署名-非商业性使用-禁止演绎 2.5 中国大陆许可协议进行许可。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步