PointNet框架理解
-
前言:
- pointnet是点云深度学习的开山之作,最近也有项目是基于此和他的进化版本pointnet++改编的,因此对pointnet的思想和结构进行理解整理。
-
点云数据:
-
特性
- 无序性:只是点而已,排列顺序不影响总体结构
- 紧密远疏的特性:扫描方法和视角不同导致
- 非结构化数据:难以直接进行CNN
-
当下主要需要解决的任务是对点云如何进行特征提取
-
能不能省略掉预处理操作而直接利用点云呢?
- 当下深度学习的核心思想就是端到端(end2end)的学习即一条龙服务,PointNet做到了这一点
graph LR a[点云数据]-->b[PointNet]-->c[object classification] b[PointNet]-->d[object part segmentation] b[PointNet]-->e[semantic scene parsing]
-
-
PointNet基本出发点
-
由于点的无序性导致,需要模型具有置换不变性
\[f(x_{1},x_{2},...,x_{n})\equiv f(x_{\pi_{1}},x_{\pi_{2}},...,x_{\pi_{n}}),x_{i}\in \mathbb{R} ^{D} \] -
例如如下公式可以保证置换不变性,但是如何在神经网络中体现出来呢?
\[f(x_{1},x_{2},...,x_{n})=max{x_{1},x_{2},...,x_{n}} \]\[f(x_{1},x_{2},...,x_{n})=x_{1}+x_{2}+...+x_{n} \] -
如果直接用Max函数(简单暴力):
graph LR a["(1,2,3)"]-->g[g=max] b["(1,1,1)"]-->g[g=max] c["(2,3,2)<br>..."]-->g[g=max] e["(2,3,4)"]-->g[g=max] g[g=max]-->h["(2,3,4)"]但是这样会损失太多特征,怎么办?
所以能不能先升维然后再做MAX操作,其实就是神经网络的隐藏层
\[f(x_{1},x_{2},...,x_{n})=\gamma \circ g(h(x_{1},...,h(x_{n})) \] -
-
基本模型架构
-
分别对每个点进行特征提取(卷积或者全连接),再MAX得到全局进行输出
graph LR a["(1,2,3)"]--"[1*3]*[3*1024]<br>升维"-->a1[MLP]--"[1*1024]<br>变为高维特征"-->g[g=max] b["(1,1,1)"]-->b1[MLP]-->g[g=max] c["(2,3,2)<br>..."]-->c1[MLP<br>...]-->g[g=max] e["(2,3,4)"]-->e1[MLP]-->g[g=max] g[g=max<br>保持置换不变性]--"1024个特征"-->h["γ<br>MLP"]--"权重参数矩阵<br>将1024个特征映射成少量结果"-->i[output]
-
-
整体模型架构
-
分类就是得到整体特征再输出,分割就是各个点特征输出结果
graph LR a["input points<br>[n*3]"]-->b["mlp(64->64)<br>两个全连接层"]-->c["升维[n*64]"] c["[n*64]<br>升维"]--"分类任务"-->d["mlp(64->128->1024)<br>三个全连接层"]-->e["[n*1024]<br>升维"]-->f[max pool]-->h[1024<br>global feature]-->i["mlp<br>(512,256,k)"]-->j["output scores<br>k"] c["[n*64]<br>升维"]--"分割任务"-->k["[n*1088]<br>[n*64]和n*全局特征进行拼接"] h[1024<br>global feature]-->k["[n*1088]<br>[n*64]和n*全局特征进行拼接"]-->l["mlp<br>(512,256,128)"]-->m["pint feature<br>[n*128]"]-->n["mlp<br>(128,m)"]-->o["output scores<br>[n*m]"] -
输入层的n*3中的n需要固定,因为不同的输入点云会具有不同的密度,所以应该对所有输入的数据进行定量采样,方便后期处理
-
[n*1088]拼接特征值的本质是
graph LR input["[n*64]"]--"由n个[1*64]的点组成"-->a["[1*64]+[1*1024]全局特征"]-->e[n*1088] input["[n*64]"]-->b["[1*64]+[1*1024]"]-->e[n*1088] input["[n*64]"]-->c[...]-->e[n*1] input["[n*64]"]-->d["[1*64]+[1*1024]"]-->e[n*1088]
-
-
知识点补充
-
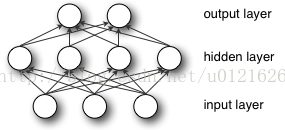
MLP(多层感知机,Multilayer Perceptron),也叫人工神经网络(ANN,Artificial Neural Network),除了输入输出层,中间可以有很多隐含层,最简单的MLP只含有一个隐含层,即三层结构:
从上图可以看到,多层感知机的层与层之间是全连接的(全连接的意思就是:上一层的任何一个神经元与下一层的所有神经元都有连接)。
多层感知机最底层是输入层,中间是隐藏层,最后是输出层。
-
输入层没什么好说,你输入什么就是什么,比如输入是一个n维向量,就有n个神经元。
-
隐藏层主要进行『特征提取』,调整权重让隐藏层的神经单元对某种模式形成反应
-
隐藏层的神经元怎么得来?
-
首先它与输入层是全连接的,假设输入层用向量X表示,则隐藏层的输出就是$$f(w_{1}x+b_{1})$$
\[w_{1}$$是权重,也叫连接系数_ $$b_{1}$$是偏置(阈值)可以排除一些“噪音”的干扰 函数f是激活函数 \]
-
-
隐藏层到输出层可以看做是一个多类别的逻辑回归,即softmax回归
-
整个MLP模型总结起来就是
\[g(x)=softmax(b_{2}+w_{2}(f(w_{1}x+b_{1}))) \] -
对于一个具体的问题,怎么确定这些参数?
- 求解最佳的参数是一个最优化问题,解决最优化问题,最简单的就是随机梯度下降法了(SGD):首先随机初始化所有参数,然后迭代地训练,不断地计算梯度和更新参数,直到满足某个条件为止(比如误差足够小、迭代次数足够多时)。
-
-
一个例子
-
目标是识别一个 4 * 3 的黑白图像是0还是1,例子中输入层采用了 12 个神经节点来对应 4 * 3 个像素点,然后隐藏层再使用 3 个神经单元进行特征提取,最后输出层再使用两个神经节点标记识别结果是 0 或 1
-
输入层
- 12个神经元对应4*3像素(黑白),如果像素是黑色的,则对应神经元兴奋,否则静息
-
隐藏层
-
隐藏层每一个节点会对输入层的兴奋有不同的接收权重,从而更加偏向于某种识别模式
-
隐藏层第一个神经单元对应下图模式A,也就是对应输入层 4、7号神经单元接收权重比较高,对其他神经单元接受权重比较低,如果超过了神经单元自身的偏置(阈值)则会引发隐藏层的兴奋,向输出层传递兴奋信息,隐藏层其他神经单元同理
-
-
各个层如何向上传递信息
- 根据上边的介绍可知,输入层每个神经单元直接对应原始数据,然后向隐藏层提供信息,隐藏层每个神经单元对不同的输入层神经单元有不同的权重,从而偏向于对某种识别模式兴奋;多个隐藏层的神经单元兴奋后,输出层的神经单元根据不同隐藏层的兴奋加上权重后,给到不同的兴奋度,这个兴奋度就是模型最终识别的结果。
-
神经网络中权重和偏置的作用
- 根据上述信息可知,权重会影响神经单元对输入信息敏感程度,比如隐藏层的神经单元通过控制权重形成识别模式偏向,输出层的神经单元调整对隐藏层神经单元的权重,可以形成输出结果的偏向;
而偏置,可以理解为敏感度,如果没有设置合适的偏置,一些“噪音”就会影响模型识别的结果,或者一些本该被识别出来的场景,但是在传递过程中被屏蔽掉了。
- 根据上述信息可知,权重会影响神经单元对输入信息敏感程度,比如隐藏层的神经单元通过控制权重形成识别模式偏向,输出层的神经单元调整对隐藏层神经单元的权重,可以形成输出结果的偏向;
-
有监督学习下,如何确认权重
-
在这里需要引入一个概念,『损失函数』又称为代价函数(cost function),计算方法为预测值与学习资料中偏差值之和(误差)的平方,有监督学习就是经过一些『学习资料』的训练,让模型预测的『误差』尽量的小。
-
-
-
-
-
pooling
-
max pooling
-
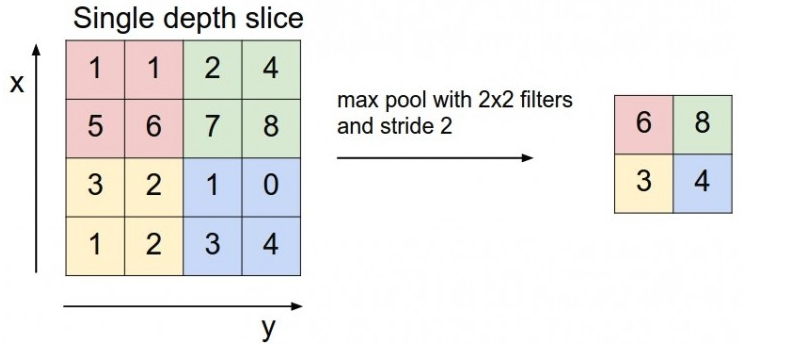
以图片为例,整个图片被不重叠地分割成若干个同样大小的小块(pooling size)。每个小块中只取最大值,舍弃其他节点后,保持原有的平面结构得出output
-
max pooling主要功能是downsampling,却不会损坏识别结果,这意味着卷积后的feature map中有对于识别物体不必要的冗余信息。那么我们就反过来思考,这些 “冗余” 信息是如何产生的。
直觉上,我们为了探测到某个特定形状的存在,用一个 filter 对整个图片进行逐步扫描。但只有出现了该特定形状的区域所卷积获得的输出才是真正有用的,用该 filter 卷积其他区域得出的数值就可能对该形状是否存在的判定影响较小。 如果不使用 Max pooling,而让网络自己去学习。 网络也会去学习与 Max pooling 近似效果的权重。因为是近似效果,增加了更多的 parameters 的代价,却还不如直接进行 Max pooling。
Max pooling 还有类似 “选择句” 的功能。假如有两个节点,其中第一个节点会在某些输入情况下最大,那么网络就只在这个节点上流通信息;而另一些输入又会让第二个节点的值最大,那么网络就转而走这个节点的分支。
但是 Max pooling 也有不好的地方。有些周边信息对某个概念是否存在的判定也有影响。 并且 Max pooling 是对所有的 Feature Maps 进行等价的操作。就好比用相同网孔的渔网打鱼,一定会有漏网之鱼。
-
对应本文中对点云的max pooling则是
graph LR e["[n*1024]<br>升维"]-->f[max pool]-->h[1024<br>global feature]graph LR input["[n*1024]"]--"由n个[1*1024]的点组成"-->a["1[1*1024]"]--将点按列分解-->e[n*1] input["[n*1024]"]-->b["2[1*1024]"]-->e[n*1] input["[n*1024]"]-->c[...]-->e[n*1] input["[n*1024]"]-->d["n[1*1024]"]-->e[n*1] e[n*1]---f[...]---g[n*1]--"从每一列选择最大值"-->h[1024<br>global feature]
-
-
-
本文来自博客园,作者:甫生,转载请注明原文链接:https://www.cnblogs.com/fusheng-rextimmy/p/15334347.html
