AGV
通信流程
握手:b5 ff aa 3 1 10 aa 99 8 5b(送料)
b5 ff aa 3 1 1 aa 38 db 5b
b5 ff ff 3 1 10 55 c 20 5b(接料)
b5 ff ff 3 1 1 ff 4ee 5b
收料轨道起转确认: b5 ff ff 3 2 11 0 3d 40 5b
b5 ff ff 3 2 1 ff 5d be 5b
b5 ff ff 3 2 10 ff fc 6d 5b
b5 ff ff 3 2 1 0 434e 5b
完成确认:b5 ff ff 3 4 11 0 9d f2 5b
b5 ff ff 3 4 1 ff ef 1e 5b
b5 ff ff 3 4 10 ff 5c df 5b
b5 ff ff 3 4 1 0 f1ee 5b
请求离开:b5 ff 14 3 5 10 10 5e 33 5b
确认离开 b5 ff 14 3 5 1 1 10 c 5b
b5 14 ff 3 5 10 10 37 ac 5b
b5 14 ff 3 5 1 1 9e65 5b
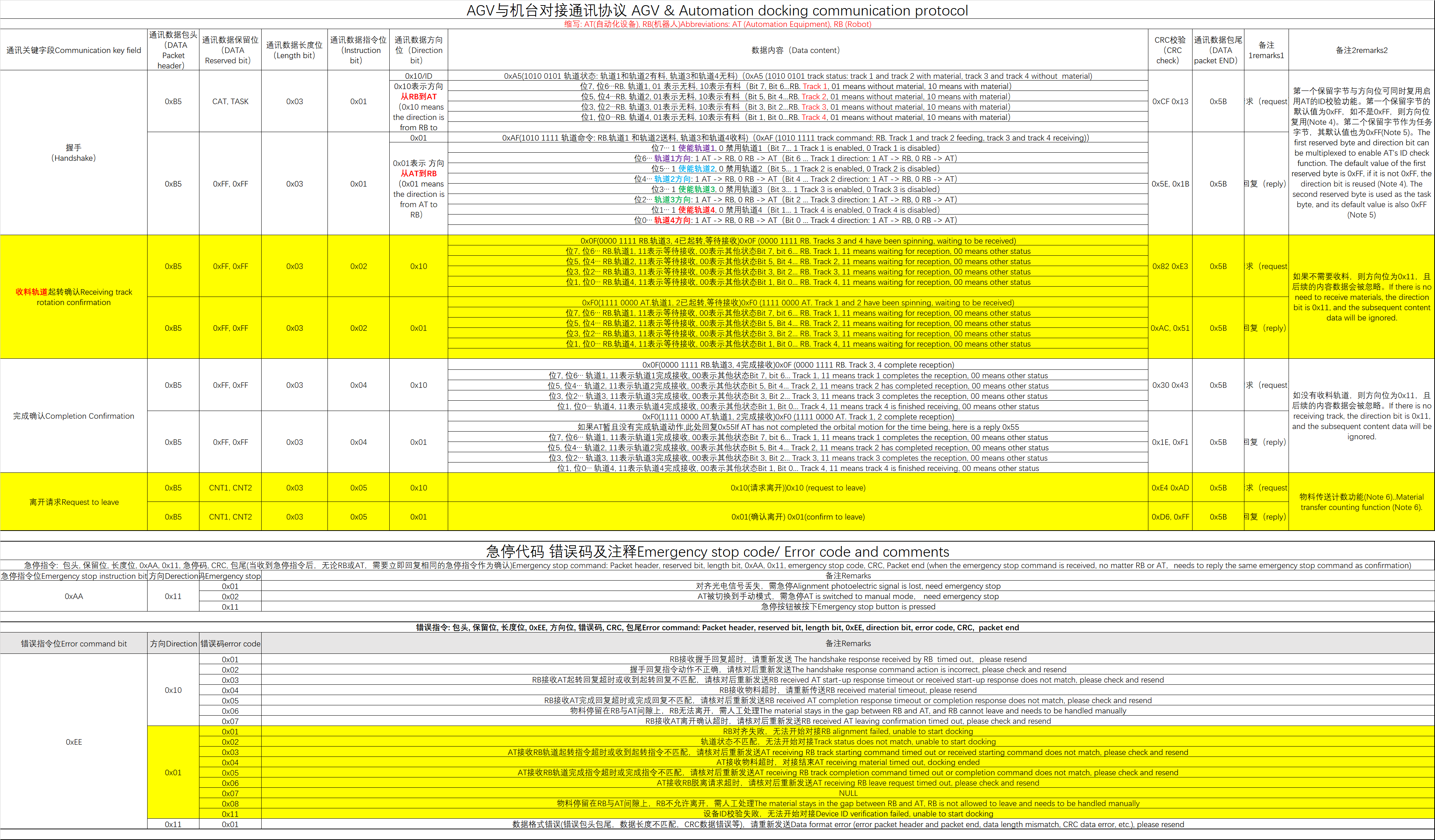
握手: 0xA5(1010 0101 轨道状态: 轨道1和轨道2有料, 轨道3和轨道4无料)
0xAF(1010 1111 轨道命令: RB.轨道1 和轨道2送料, 轨道3和轨道4收料)
收料轨道起转确认: 0x0F(0000 1111 RB.轨道3, 4已起转,等待接收)
0xF0(1111 0000 AT.轨道1, 2已起转,等待接收)
完成确认: 0x0F(0000 1111 RB.轨道3, 4完成接收)
0xF0(1111 0000 AT.轨道1, 2完成接收)
io板顺序
左上:全上, 右上:1下2上,
左下:1上2下, 右下:全下
查看小车实时日志
cat /opt/ares/cmsg.pipe # ssh root@172.19.166.**(100号为167+AGV号码后2位×2,117为之前版本) # 密码root
查看激光
./megbot/bringup/robot_start.sh # ssh nvidia@172.19.166.小车号ip×2加1 #密码nvidia
./megbot/bringup/robot_restart.sh # 重启激光
修改小车服务器ip
cd /opt/ares/config
vi user_cfg.json # /server_ip搜索
ZZ # 保存
sync # 同步数据
cd .. && killall robot # 返回上一级重启robot
转换日志
cd testLog/New\Folder # 进入252服务器,密码pinYIN101,
python log_analysis.py imos-info-log-0031-20210525123117-00.txt 31.txt
录包
1. ssh nvidia@172.19.16*.** (与查看激光日志相同)。 //建立连接
2. 密码:nvidia
3. rosbag record -a //录包命令
4. 等待2-3分钟后,按下ctrl + c //结束录包
5. 在xshall中点击ftp图标 //通过ftp连接服务器
6. 进入ftp后,找到一个以当天日期命名的压缩包,右键传输到本地 //从服务器下载压缩包
解绑货架
curl "http://172.19.167.251/tes/apiv2/multiRemovePod" -d 'warehouseID=338046201247039634&podIDs=1617396609263684'
#进入服务器,将上述命令的podlDS的货架id号更改后回车即可,取消AGV占用状态,在RTD上将任务结束掉
查看网络情况(实时丢包率)
tail -f /opt/log/fping.log # 从网关ping
小车重启后运行脚本
/root/fping -D -l 172.19.167.251 | awk '{ print $0"\t" strftime("%Y/%m/%d %H:%M:%S",systime()) } ' >> /opt/log/fping.log &
机台网络配置ip
网络配置ip
电脑更改网络适配器选项
mes右键属性
internet协议版本4(TCP/IPv4)双击
ip地址与默认网关前三位一致,子网掩码255.255.255.x
关闭防火墙
关闭防火墙
检测防火墙状态
启用或关闭防火墙
专用和公用网络设置关闭防火墙
AGV 轨道宽度360mm 高度1160mm 离地高度450mm
AGV实操表
| 类别 | 考核项目 | 正确答案 | |
|---|---|---|---|
| 安全类 | 安全生产及5S | 安全注意事项: ①检修工作时按规定穿戴好劳保防护用品(安全帽) ②严格按照三按两遵守进行作业,穿戴PVC/丁腈手套作业,5S |
|
| 机台 | 机台IP网络配置 | (实操)自动化机台MES网络IP配置 | |
| AGV | AGV操作面板 | (口述+实操)旋钮、屏幕功能操作,急停复位,碰撞报警等 | |
| AGV维修更换 | (实操)AGV脚轮更换 | ||
| AGV软件 | RTD任务管理平台 | (口述+实操)任务管理/设备状态/设备管理/定线配置/任务触发条件规则 | |
| RMS机器人监控中心 | (口述+实操)AGV状态监控/RMS调度控制传输/设备参数读写/地图编辑上传/发布升级 | ||
| 河图 | (口述+实操)河图实时监控调度/充电策略配置/AGV运力组分配/机器人注销下线/河图地图导入升级 | ||
| Slamtool地图编辑 | (口述)建图/拼图,(口述+实操)打点/规划路线/地图编辑 | ||
| 河图规划平台 | (口述+实操)RMS地图信息导入/导航规划/控件规划/保存导出河图地图文件 | ||
| 爱旭业务管理系统 | (口述+实操)任务对接精度信息/任务管理/机台运力组管理 | ||
| Xshell软件 | (口述+实操)对AGV进行IP配置以及查询实时日志/对接日志分析/日志转换 |
新增机台配置方法
新增机台配置方法:
第一步: RMS更新地图
第二步: 河图更新地图
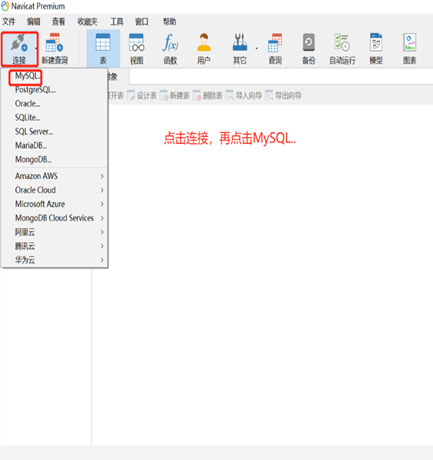
第三步:打开Navicat数据库连接到251数据库

现场增加机台,新增加的机台在地图上设置后,并导入河图后,需要在cst_ptp_aikosolar 服务使用的机台配置表 增加信息;
1.把新增机台的信息配置到 machine_target 表中
需要配置的字段有:
warehouse_id, 仓库id
workstage, 工序名字,比如 LSR,BTU
station, 机台名字,比如 LSR07
target, 机台对接口,按照RTD定义的数值码配置,如2408071
port, 对接口编号 01,02,03,04,
tracks, 轨道数,[1,2,3,4], 这个值不用变
zone_id, 在地图上面机台对接口的 zone_id
node_id, 在地图上面的 node_id
transient, 休息区 的zone_id
robot_group, 机器人运力组的名字,如c1611487123017
status, 是否有效 1,有效,0,无效
before_zone_id ,机台对接口前置点的 zone_id,
其中,robot_group运力组和transient休息区是规划的, 按照四期干区,四期湿区,五期干区,五期湿区分别配置;
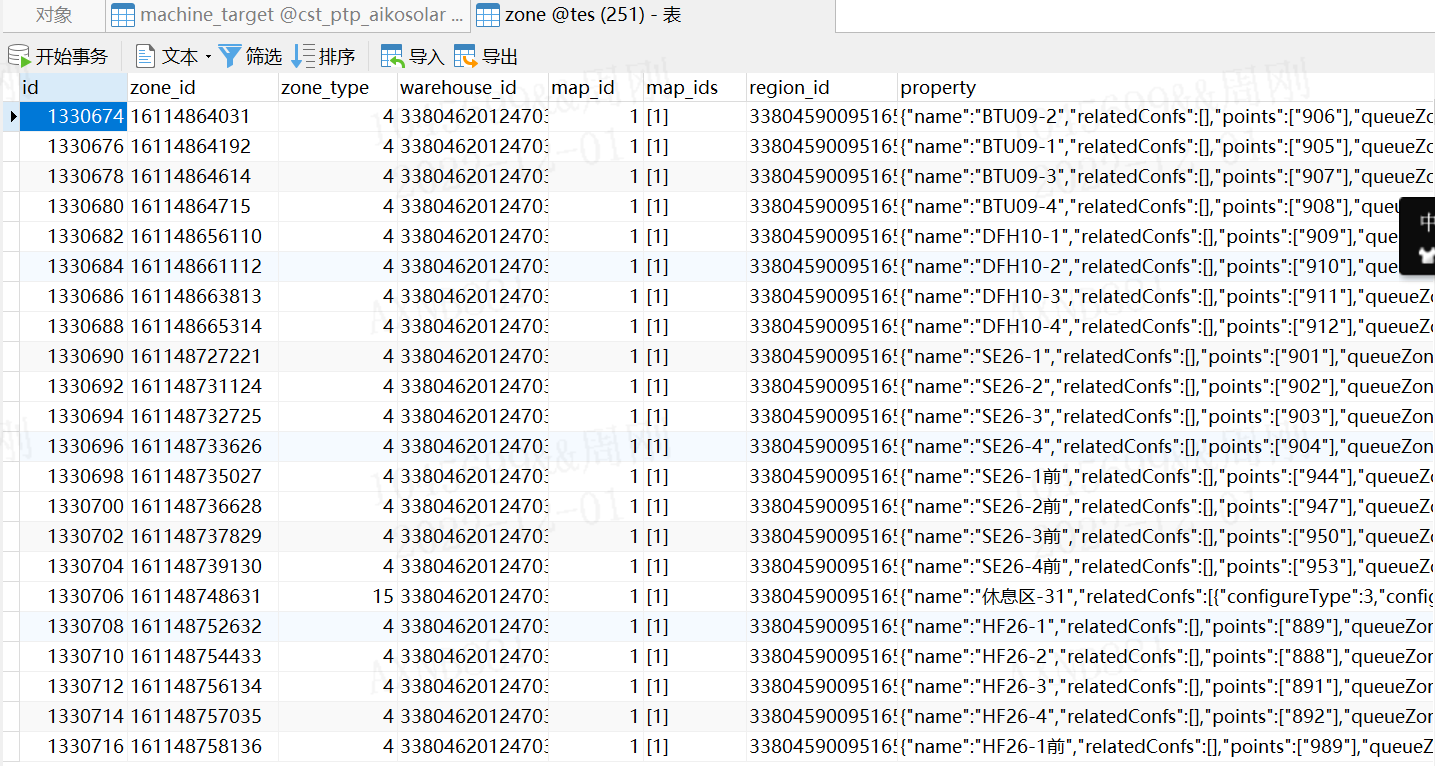
输入下行字符段查询zone表对应信息
select * from tes.zone where property like '%新增机台名%';
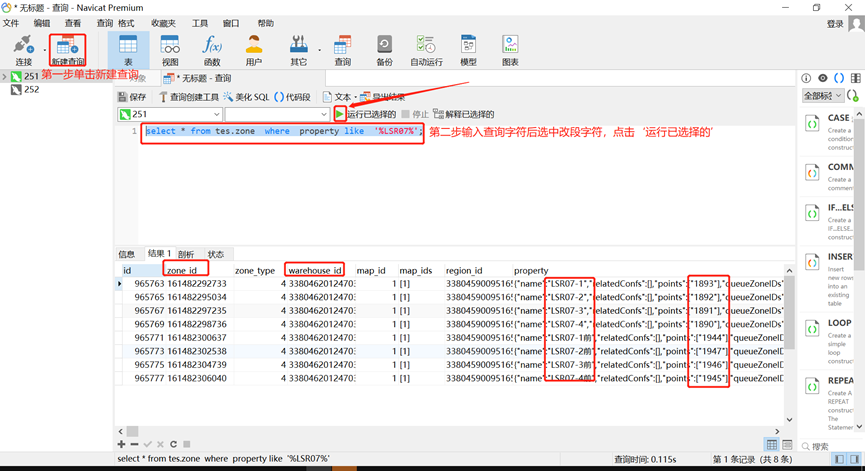
以LSR07为例,配置前先查询中zone表中 这个机台的zone信息, 关注标红的内容,一个机台4条配置语句,配置语句如下:
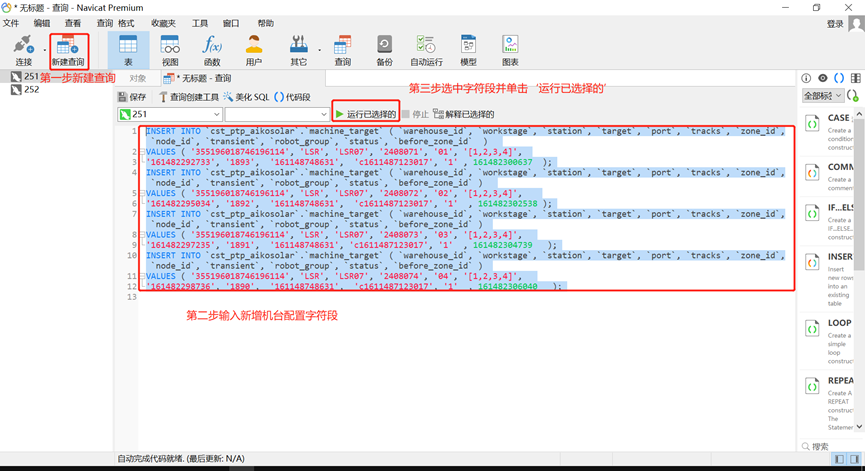
INSERT INTO `cst_ptp_aikosolar`.`machine_target` ( `warehouse_id`, `workstage`, `station`, `target`, `port`, `tracks`, `zone_id`, `node_id`, `transient`, `robot_group`, `status`, `before_zone_id` )
VALUES ( '355196018746196114', 'LSR', 'LSR07', '2408071', '01', '[1,2,3,4]',
'161482292733', '1893', '161148748631', 'c1611487123017', '1' , 161482300637 );
INSERT INTO `cst_ptp_aikosolar`.`machine_target` ( `warehouse_id`, `workstage`, `station`, `target`, `port`, `tracks`, `zone_id`, `node_id`, `transient`, `robot_group`, `status`, `before_zone_id` )
VALUES ( '355196018746196114', 'LSR', 'LSR07', '2408072', '02', '[1,2,3,4]',
'161482295034', '1892', '161148748631', 'c1611487123017', '1' , 161482302538 );
INSERT INTO `cst_ptp_aikosolar`.`machine_target` ( `warehouse_id`, `workstage`, `station`, `target`, `port`, `tracks`, `zone_id`, `node_id`, `transient`, `robot_group`, `status`, `before_zone_id` )
VALUES ( '355196018746196114', 'LSR', 'LSR07', '2408073', '03', '[1,2,3,4]',
'161482297235', '1891', '161148748631', 'c1611487123017', '1' , 161482304739 );
INSERT INTO `cst_ptp_aikosolar`.`machine_target` ( `warehouse_id`, `workstage`, `station`, `target`, `port`, `tracks`, `zone_id`, `node_id`, `transient`, `robot_group`, `status`, `before_zone_id` )
VALUES ( '355196018746196114', 'LSR', 'LSR07', '2408074', '04', '[1,2,3,4]',
'161482298736', '1890', '161148748631', 'c1611487123017', '1' , 161482306040 );
输入下行字符段,检查配置好机台的信息
select * from cst_ptp_aikosolar.machine_target where station = 'LSR07';
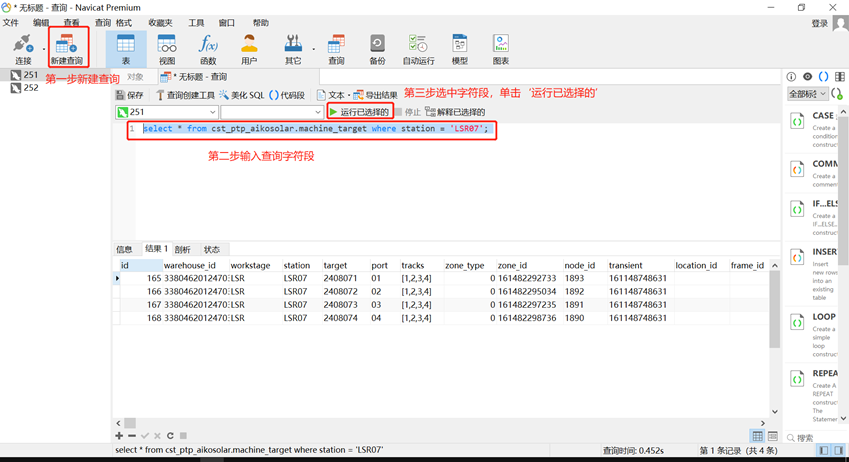
检查机台配置信息无误后,配置完成,关闭Navicat。
以下内容不是配置语句,是这个机台在zone表中的信息
LSR07在 tes.zone表中的信息如下:
mysql> select * from tes.zone where property like '%LSR07%';
+------+--------------+-----------+--------------------+--------+---------+--------------------+--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------+--------+---------------------+---------------------+
| id | zone_id | zone_type | warehouse_id | map_id | map_ids | region_id | property | status | create_time | update_time |
+------+--------------+-----------+--------------------+--------+---------+--------------------+--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------+--------+---------------------+---------------------+
| 7124 | 161482292733 | 4 | 355196018746196114 | 1 | [1] | 353557435757101195 | {"name":"LSR07-1","relatedConfs":[],"points":["1893"],"queueZoneIDs":[],"direction":0,"workDirection":0,"rotateNodeIDs":[],"workPoints":[{"nodeID":"1893","preNodeIDs":[],"color":""}],"queueInfos":[],"relatedIots":[],"elevatorIDs":null,"storageSpaceID":"","storageDirection":"","storageHeight":"","relatedStationID":"","podOutCostVal":0,"transferStationZoneID":"","connectToZoneID":"","connectFromFlag":"","stationType":0,"avoidMode":0,"carryMode":0,"bufferCnt":0,"hardwareCode":"","hardwareType":"","clientCode":"","chuteType":"","needReport":0,"conveyorHardwares":{},"queueHardwareCodes":"","isArmSource":0,"isArmDestination":0,"isArmException":0,"armLocationID":0,"armZoneID":"","LocationCode":"","property":"","nextZoneID":""} | 1 | 2021-06-21 09:50:59 | 2021-06-21 09:50:59 |
| 7125 | 161482295034 | 4 | 355196018746196114 | 1 | [1] | 353557435757101195 | {"name":"LSR07-2","relatedConfs":[],"points":["1892"],"queueZoneIDs":[],"direction":0,"workDirection":0,"rotateNodeIDs":[],"workPoints":[{"nodeID":"1892","preNodeIDs":[],"color":""}],"queueInfos":[],"relatedIots":[],"elevatorIDs":null,"storageSpaceID":"","storageDirection":"","storageHeight":"","relatedStationID":"","podOutCostVal":0,"transferStationZoneID":"","connectToZoneID":"","connectFromFlag":"","stationType":0,"avoidMode":0,"carryMode":0,"bufferCnt":0,"hardwareCode":"","hardwareType":"","clientCode":"","chuteType":"","needReport":0,"conveyorHardwares":{},"queueHardwareCodes":"","isArmSource":0,"isArmDestination":0,"isArmException":0,"armLocationID":0,"armZoneID":"","LocationCode":"","property":"","nextZoneID":""} | 1 | 2021-06-21 09:50:59 | 2021-06-21 09:50:59 |
| 7126 | 161482297235 | 4 | 355196018746196114 | 1 | [1] | 353557435757101195 | {"name":"LSR07-3","relatedConfs":[],"points":["1891"],"queueZoneIDs":[],"direction":0,"workDirection":0,"rotateNodeIDs":[],"workPoints":[{"nodeID":"1891","preNodeIDs":[],"color":""}],"queueInfos":[],"relatedIots":[],"elevatorIDs":null,"storageSpaceID":"","storageDirection":"","storageHeight":"","relatedStationID":"","podOutCostVal":0,"transferStationZoneID":"","connectToZoneID":"","connectFromFlag":"","stationType":0,"avoidMode":0,"carryMode":0,"bufferCnt":0,"hardwareCode":"","hardwareType":"","clientCode":"","chuteType":"","needReport":0,"conveyorHardwares":{},"queueHardwareCodes":"","isArmSource":0,"isArmDestination":0,"isArmException":0,"armLocationID":0,"armZoneID":"","LocationCode":"","property":"","nextZoneID":""} | 1 | 2021-06-21 09:50:59 | 2021-06-21 09:50:59 |
| 7127 | 161482298736 | 4 | 355196018746196114 | 1 | [1] | 353557435757101195 | {"name":"LSR07-4","relatedConfs":[],"points":["1890"],"queueZoneIDs":[],"direction":0,"workDirection":0,"rotateNodeIDs":[],"workPoints":[{"nodeID":"1890","preNodeIDs":[],"color":""}],"queueInfos":[],"relatedIots":[],"elevatorIDs":null,"storageSpaceID":"","storageDirection":"","storageHeight":"","relatedStationID":"","podOutCostVal":0,"transferStationZoneID":"","connectToZoneID":"","connectFromFlag":"","stationType":0,"avoidMode":0,"carryMode":0,"bufferCnt":0,"hardwareCode":"","hardwareType":"","clientCode":"","chuteType":"","needReport":0,"conveyorHardwares":{},"queueHardwareCodes":"","isArmSource":0,"isArmDestination":0,"isArmException":0,"armLocationID":0,"armZoneID":"","LocationCode":"","property":"","nextZoneID":""} | 1 | 2021-06-21 09:50:59 | 2021-06-21 09:50:59 |
| 7128 | 161482300637 | 4 | 355196018746196114 | 1 | [1] | 353557435757101195 | {"name":"LSR07-1前","relatedConfs":[],"points":["1944"],"queueZoneIDs":[],"direction":0,"workDirection":0,"rotateNodeIDs":[],"workPoints":[{"nodeID":"1944","preNodeIDs":[],"color":""}],"queueInfos":[],"relatedIots":[],"elevatorIDs":null,"storageSpaceID":"","storageDirection":"","storageHeight":"","relatedStationID":"","podOutCostVal":0,"transferStationZoneID":"","connectToZoneID":"","connectFromFlag":"","stationType":0,"avoidMode":1,"carryMode":0,"bufferCnt":0,"hardwareCode":"","hardwareType":"","clientCode":"","chuteType":"","needReport":0,"conveyorHardwares":{},"queueHardwareCodes":"","isArmSource":0,"isArmDestination":0,"isArmException":0,"armLocationID":0,"armZoneID":"","LocationCode":"","property":"","nextZoneID":""} | 1 | 2021-06-21 09:50:59 | 2021-06-21 09:50:59 |
| 7129 | 161482302538 | 4 | 355196018746196114 | 1 | [1] | 353557435757101195 | {"name":"LSR07-2前","relatedConfs":[],"points":["1947"],"queueZoneIDs":[],"direction":0,"workDirection":0,"rotateNodeIDs":[],"workPoints":[{"nodeID":"1947","preNodeIDs":[],"color":""}],"queueInfos":[],"relatedIots":[],"elevatorIDs":null,"storageSpaceID":"","storageDirection":"","storageHeight":"","relatedStationID":"","podOutCostVal":0,"transferStationZoneID":"","connectToZoneID":"","connectFromFlag":"","stationType":0,"avoidMode":1,"carryMode":0,"bufferCnt":0,"hardwareCode":"","hardwareType":"","clientCode":"","chuteType":"","needReport":0,"conveyorHardwares":{},"queueHardwareCodes":"","isArmSource":0,"isArmDestination":0,"isArmException":0,"armLocationID":0,"armZoneID":"","LocationCode":"","property":"","nextZoneID":""} | 1 | 2021-06-21 09:50:59 | 2021-06-21 09:50:59 |
| 7130 | 161482304739 | 4 | 355196018746196114 | 1 | [1] | 353557435757101195 | {"name":"LSR07-3前","relatedConfs":[],"points":["1946"],"queueZoneIDs":[],"direction":0,"workDirection":0,"rotateNodeIDs":[],"workPoints":[{"nodeID":"1946","preNodeIDs":[],"color":""}],"queueInfos":[],"relatedIots":[],"elevatorIDs":null,"storageSpaceID":"","storageDirection":"","storageHeight":"","relatedStationID":"","podOutCostVal":0,"transferStationZoneID":"","connectToZoneID":"","connectFromFlag":"","stationType":0,"avoidMode":1,"carryMode":0,"bufferCnt":0,"hardwareCode":"","hardwareType":"","clientCode":"","chuteType":"","needReport":0,"conveyorHardwares":{},"queueHardwareCodes":"","isArmSource":0,"isArmDestination":0,"isArmException":0,"armLocationID":0,"armZoneID":"","LocationCode":"","property":"","nextZoneID":""} | 1 | 2021-06-21 09:50:59 | 2021-06-21 09:50:59 |
| 7131 | 161482306040 | 4 | 355196018746196114 | 1 | [1] | 353557435757101195 | {"name":"LSR07-4前","relatedConfs":[],"points":["1945"],"queueZoneIDs":[],"direction":0,"workDirection":0,"rotateNodeIDs":[],"workPoints":[{"nodeID":"1945","preNodeIDs":[],"color":""}],"queueInfos":[],"relatedIots":[],"elevatorIDs":null,"storageSpaceID":"","storageDirection":"","storageHeight":"","relatedStationID":"","podOutCostVal":0,"transferStationZoneID":"","connectToZoneID":"","connectFromFlag":"","stationType":0,"avoidMode":1,"carryMode":0,"bufferCnt":0,"hardwareCode":"","hardwareType":"","clientCode":"","chuteType":"","needReport":0,"conveyorHardwares":{},"queueHardwareCodes":"","isArmSource":0,"isArmDestination":0,"isArmException":0,"armLocationID":0,"armZoneID":"","LocationCode":"","property":"","nextZoneID":""} | 1 | 2021-06-21 09:50:59 | 2021-06-21 09:50:59 |
+------+--------------+-----------+--------------------+--------+---------+--------------------+--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------+--------+---------------------+---------------------+
8 rows in set (0.01 sec)
mysql>
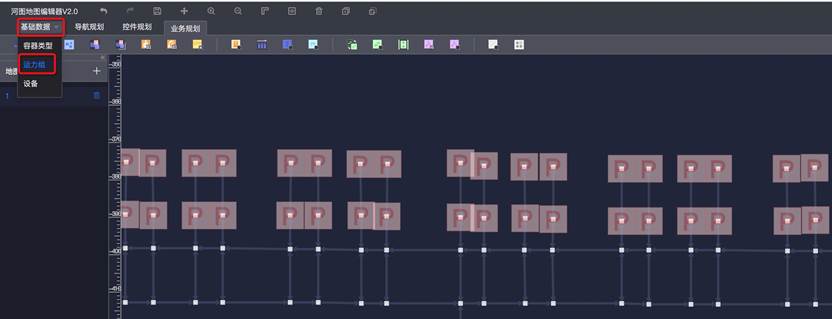
2. 添加运力组
- 点击基础数据中的‘运力组列’如图
- 点击全部运力组右侧的 ‘+’号,并在右侧列表中修改运力组名称及服务设备,如图
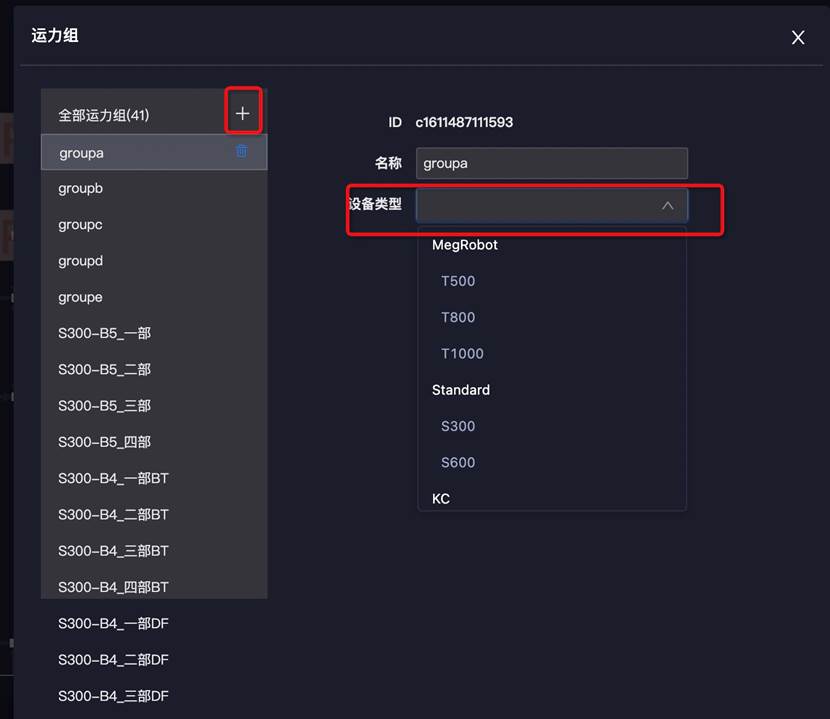
- 添加完成后,下拉点击保存按钮即可
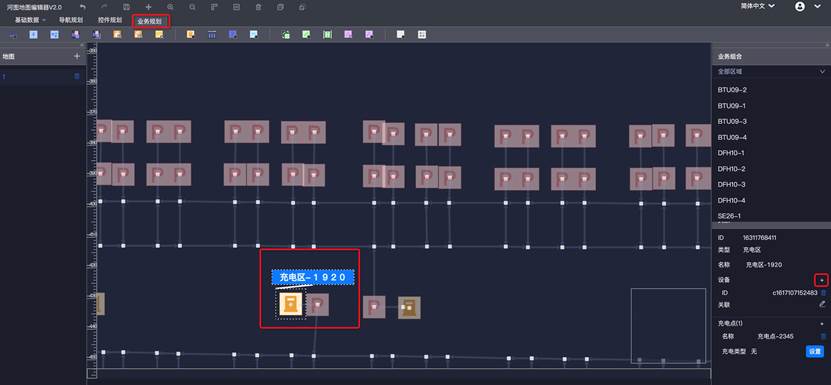
3. 分配充电桩服务运力组
- 点击业务规划按钮,选择所需修改的充电桩,点击右侧选项‘设备’中右侧的‘+’号
- 勾选所需添加的运力组后,点击确认按钮即可
- 点击保存,下载,修改文件名后上传河图边缘即可
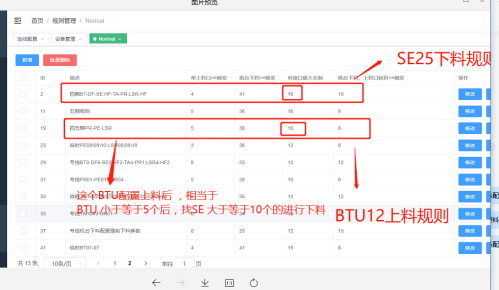
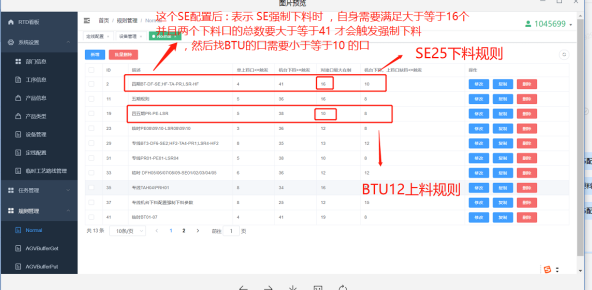
RTD上下料触发规则
自动化机台MES网络IP配置
五厂车间IP配置和VNC安装方法
一、IP配置方法
1.打开网络设置
2.点击更改适配器选项

-
将网线插入PLC端口,将对应网络重命名为“MES”,记下对应网线的编号。

4.右键我们命名的“MES”网络,点击属性设置,双击Internet 协议版本4(TCP/IPV4)
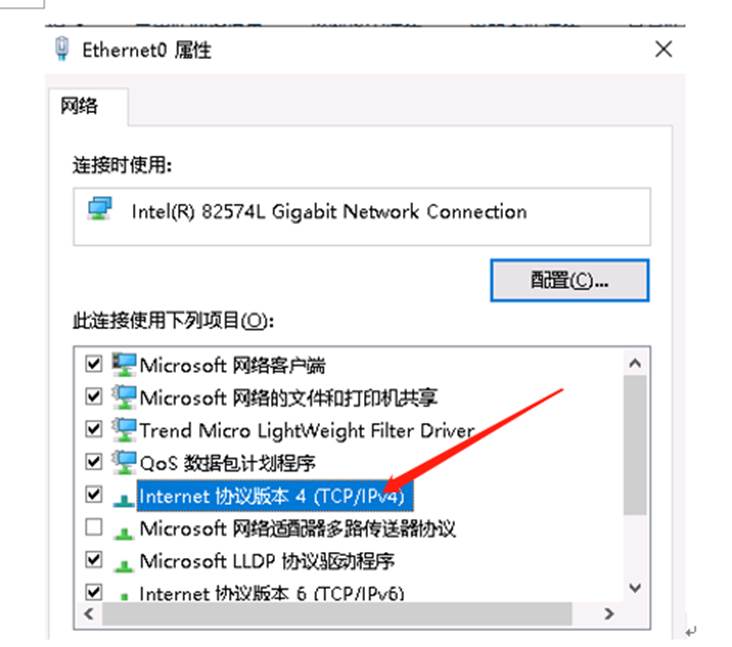
5.修改IP地址为表中所给IP,子网掩码为255.255.255.0,网关为IP地址最后一位改为1
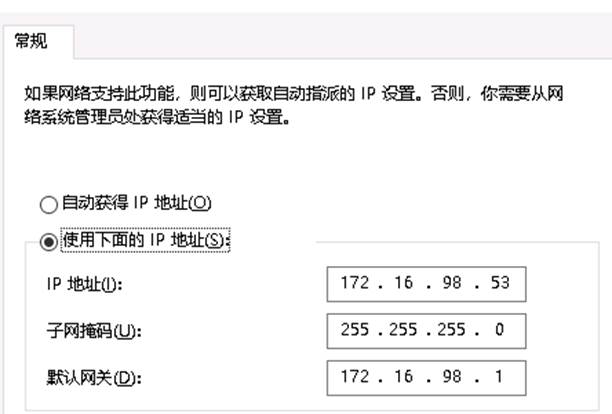
6.修改完点击确定,右侧弹出窗口点击YES
7.关闭防火墙,如step1/2/3所示。


8.按下win+r,输入cmd打开命令提示符,输入 ping+空格+172.16.99.128 自动化工业室的IP

此图为ping通服务器的情况,若ping不通服务器,则找IT的杨小卫。
8找到前面配置的MES,双击,点击详细信息,记录下物理地址。

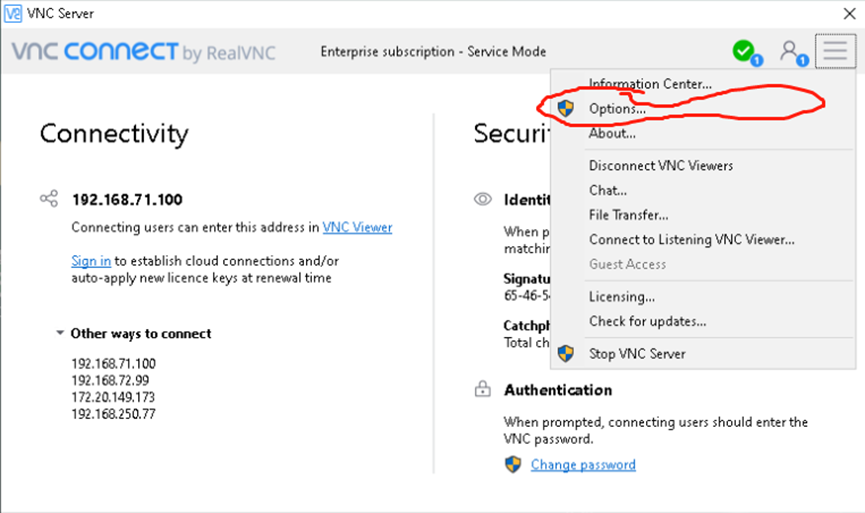
二、VNC安装
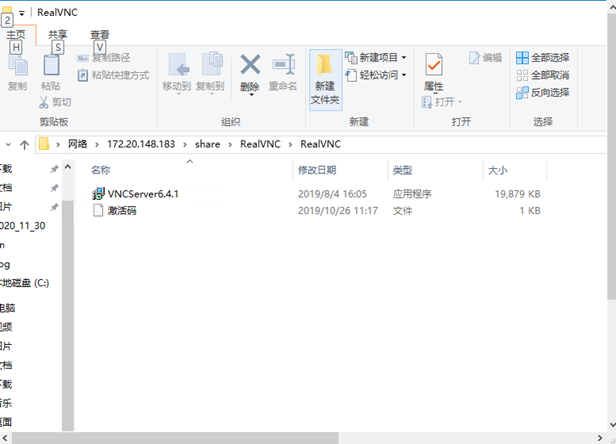
1、确保电脑能访问共享盘
2、关闭防火墙
3、访问\172.16.99.128 ,从公共盘里面拿出VNC的安装包。
点击OK
点NEXT
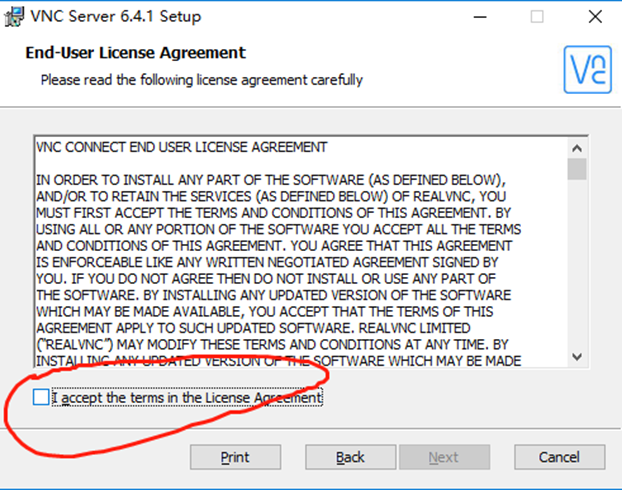
接受协议然后一直点击NEXT直到出现这个界面。
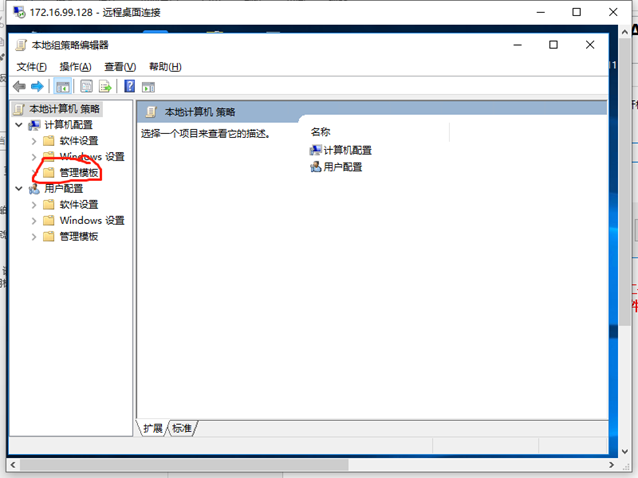
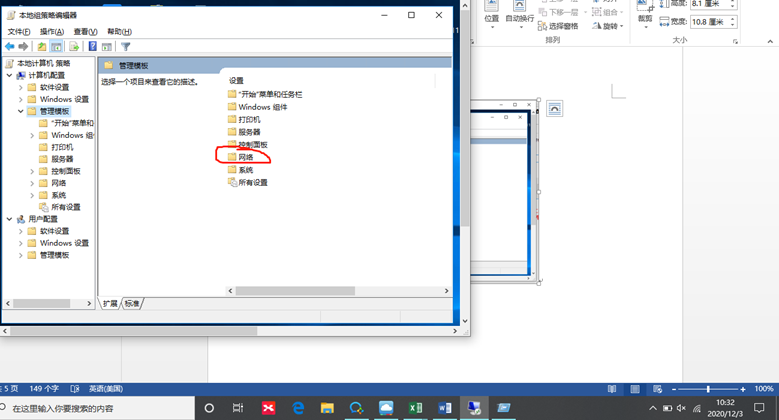
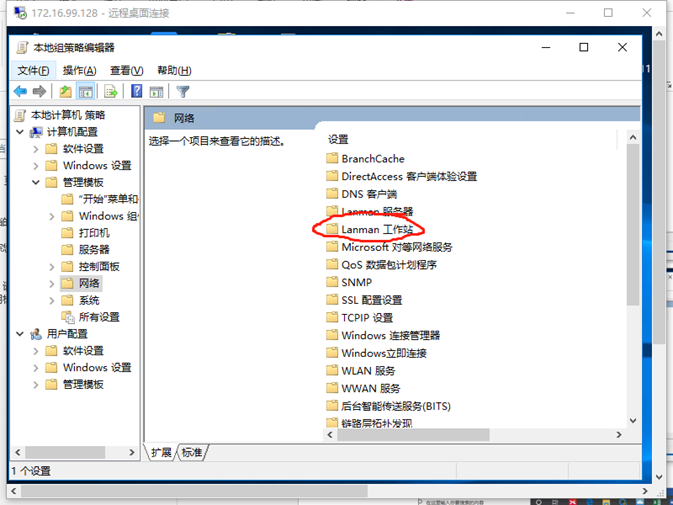
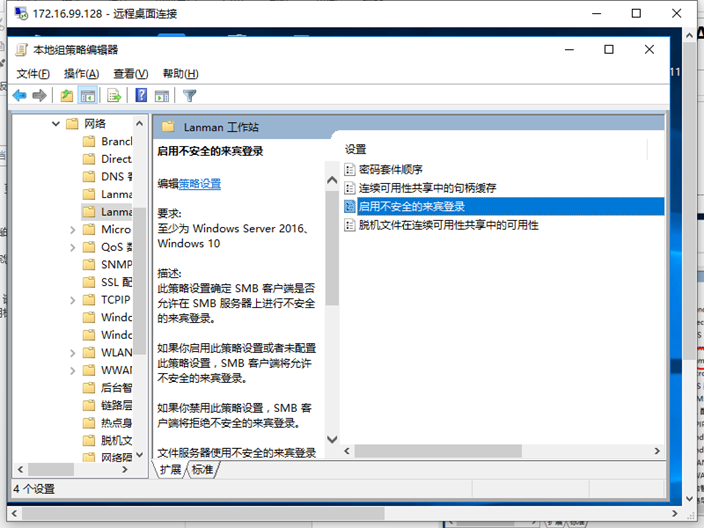
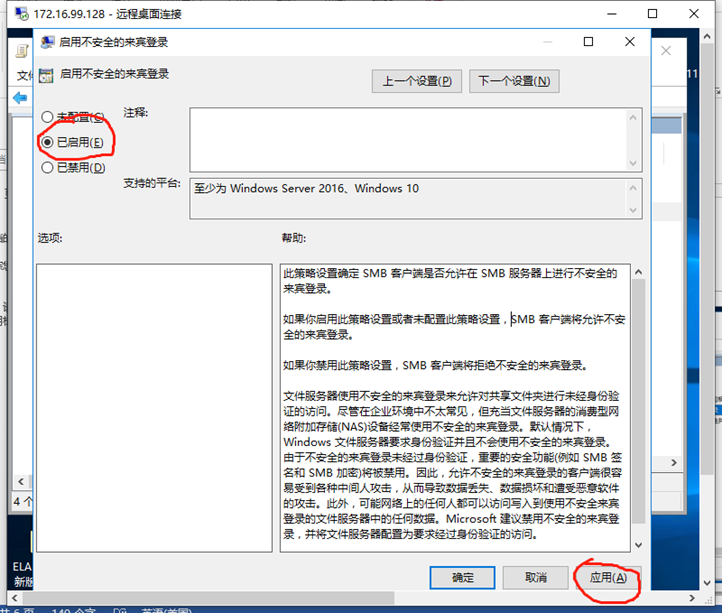
4. 按下 Win+R **, **输入 gpedit.msc
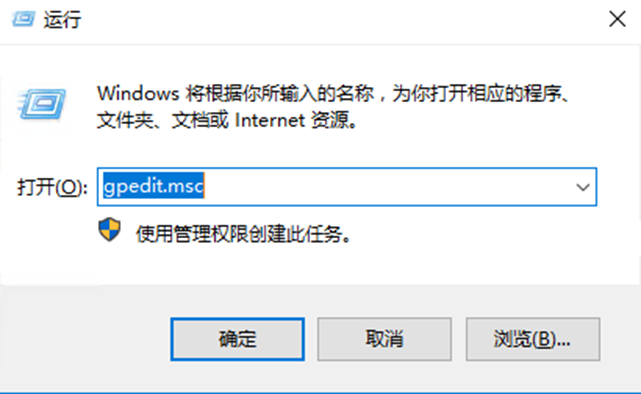
5. 然后依次点击管理模板 → 网络 →Lanman工作站→启用不安全的来宾登录→点击已启用,然后根据之前的方法安装软件。
6、安装完成后按并左下角Register office输入激活:77NVU-D9G5T-79ESS-V9Y6X-JMVGA(即文件里的激活码)
点击这里设置访问密码
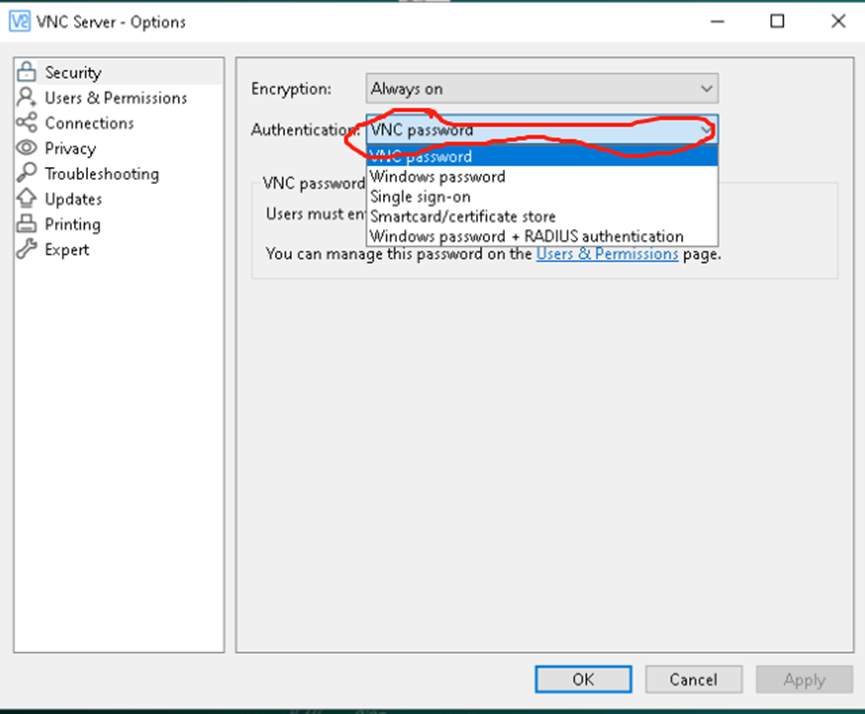
修改成VNC password,密码统一设置成123456。
7、 电脑无法远程解决方法: ① 检查网络是否通畅; ②检查防火墙是否关闭;③卸载软件重新安装。

注:需要自动化开发部协助请提交工业自动室需求。
保姆级打点建图教程

AGV理论基础
一、 选择题(单选)(每题3分,共30分)
-
产线要求设备开启AGV定线模式,应该在( )软件上打开定线开关
A、WinSCP
B、RTDC、UmViewer D、OPC -
AGV的充电桩额定输出电压与电流分别是( )
A.10V 10A B. 30V 30A C. 60V 10A
D. 60V 30A -
AGV电池充放比( )
A、1:6 B、1:8
C、1:4D、1:10 -
AGV的导航方式( )
A. 激光导航B. 视觉导航 C. 电磁导航 D. 磁条导航 -
反光条起什么作用( )
A、反射自动化信号 B、反射视觉光源
C、引导AGV与自动化精确对齐D、反射红外模块信号 -
设备维护保养管理的目的是( )
A、提供设备使用效率B、延长设备使用年限 C、保证设备正常使用 D、不让设备损坏 -
电池电量低于百分之( )会强制关机
A、20
B、7C、15 D、10 -
AGV是由( )进行现场地理位置扫描的。
A、 侧激光 B、声呐 C、红外模块
D、主激光 -
AGV主服务器IP地址是( )
A、172.19.167.252
B、172.19.167.251C、172.19.167.253 D、172.19.165.158 -
AGV与自动化机台正常对接传输的上轨道高度是( )。
A、450mm
B、1160mmC、360mm D、1150mm -
产线要求设备开启AGV对接模式,应该在( )软件上打开任务开关
A、WinSCP
B、RTDC、UmViewer D、OPC -
自动化机台与AGV之间是通过______进行信号通信的( )
A. 反光板 B. 主激光 C. 无线网
D. 红外模块 -
自动化机台轨道花篮数量的感应器信息被采集到( )软件中
A、WinSCP B、SLCClient
C、OPCD、UmViewer -
AGV的搬运任务是有什么系统产生( )
A. RTDB. PAC C. OPC D. RMS -
小车LCD屏幕任务状态栏显示Slam相对位姿异常表示( )
A、正在传输 B、任务发出
C、对接失败D、任务取消 -
SE上料自动化轨道上的花篮感应器属于什么光电开关( )
A、对射型B、漫反射型 C、磁感应型 D、电磁波式 -
AGV车体宽度(不包括测激光)为( )mm
A、900
B、820C、500 D、750 -
AGV是由( )系统控制车体运行的。
A、MES B、PAC C、OPC
D、RMS -
AGV上面抱闸旋钮右旋的主要作用是( )
A、开机
B、解除刹车C、任务刷新 D、关机 -
AGV轨道上的安全光电属于( )。
A、对射型
B、漫反射型C、磁感应型 D、电磁波式
二、 填空题(每题2分,共20分)
1、 AGV搬运任务是通过OPC系统采集自动化机台上的轨道花篮数和轨道状态后发送给 PAC 系统进行信息订阅,然后再上传给MES系统后由 RTD 任务管理系统进行逻辑处理产生的任务。
2、 AGV是由 河图 系统进行调度解环,由 RMS 进行本体控制
3、 AGV编辑地图到更新地图完成需要用到的软件平台有Slamtool 、 RMS 、 河图规划平台 、 河图 四部分组成
4、 驱动单元内部主要有(减速机) 、(电机) 、(刹车) 、(转接板)组成
5、 AGV的对接精度要求是 X轴≤±3mm 、 Y轴≤±10mm 、 角度≤±1°
6、 AGV的主激光急停避障范围为0-350mm,若小于这个距离AGV会报 Nano急停
7、 AGV正常运行过程中绿灯闪烁,旋转过程中 黄灯 闪烁,对接失败 红灯 闪烁
8、 自动化机台与AGV之间是通过红外模块以(串口)协议通信方式
9、 AGV前进时正向避障分为 急停区 、 减停区、 减速区 三个避障区域
10、 通讯协议中:“B5-FF-FF-03-AA-11-11-13-E8-5B“ 则表示AGV对接收到急停信号
11、 AGV的侧激光是用来检测侧面和前方障碍物的; 主激光 是用来实时扫描现场环境,反馈AGV当前实时位置
12、 PLC常见的输出类型分为继电器型 , 晶体管型 , 晶闸管型 三种
13、 AGV的控制器主要有(主控板)、(IO板)、(伺服驱动器) 三个组成
14、 驱动单元内部主要有(减速机) 、(电机) 、(刹车) 、(转接板)组成
15、 AGV调度任务的产生是由 RTD 系统发送到 WCS系统来分配完成的
16、 AGV的陀螺仪主要起辅助转向的作用
17、 在AGV 前 方和 后 方具有Bumper
三、 判断题(每题1分,共10分)
1、 AGV的TARGET可以凭自己的个人喜好随意改变 (X)
2、 AGV在运行过程中可以随意按拍急停按钮 (X)
3、 AGV与自动化之间的通讯是通过红外模块传递的 ( √ )
4、 在监控画面中发现AGV对接异常,可以远程在电脑上刷新AGV任务状态 ( X )
5、 在经常堵车的路口,可以增加优先级节点优化路线 ( √ )
6、 AGV是Automated Guide Vehincle的简称,是一种装备有自动导引装置,可实现工业4.0车间柔性化物料运输的智能搬运工具。( √ )
7、 AGV与自动化机台通过红外模块实现通讯对接,其中红外模块接线端子的GND接地公共端和电源信号接地线所起功能一致。( × )
8、 OPC采集的自动化机台轨道花篮数目是通过花篮感应传感器将I/O信号上传至PLC,再由PLC传给OPC。( √ )
9、 目前我们车间ROBO自动化上下料机皮带速度控制用的是变频器多段速控制模式,当需要调整自动化与AGV对接时皮带传动速度,则需要调整相应的变频器参数P6。( × )
10、 AGV调度任务生成逻辑顺序:自动化机台-OPC-PAC-MES-RTD-WCS-河图-RMS-AGV( √ )
11、AGV车体净重为400KG( √ )
四、 解答题(共40分)
(一) 请写出AGV与自动化正常通讯的步骤(10分)
AGV请求握手→机台确认握手→AGV请求起转→机台确认起转→AGV请求传输完成→机台确认传输完成→AGV请求离开→机台确认AGV离开
(二) 请写出充电庄的点检内容。(10分)
① 充电桩电源线 ②充电桩外观 ③充电桩定位 ④充电桩摇摆头弹簧 ⑤充电桩温度
(三) AGV常见异常处理(10分)
①避障:障碍物移走后自动恢复/AGV手动解抱闸后移走AGV吸附节点自动恢复
②Nano急停:障碍物距离主激光小于20cm触发,处理方法同上
③急停触发:急停按钮被按下,旋起急停按钮,按复位键+启动键恢复
④碰撞报警:撞击AGV前后防撞条触发,按复位键+启动键恢复
⑤相对绝对位置异常:AGV对接精度不达标,重新对接使其精度达标后恢复
⑥Slam相对位姿:AGV未识别到反光条触发,识别到反光条后恢复/下电重启恢复
⑦偏离导航:AGV偏航触发,RMS吸附到点,按启动键恢复
⑧离线:AGV未连接到WIFI触发,下电重启恢复
⑨2d雷达报警:主激光异常触发2d雷达报警,下电重启恢复
⑩AGV传输卡料报警处理:现场手动处理卡料后,按启动键恢复
(四) 掌握本岗位的危险源,讲出注意事项及处理措施。(10分)
机械安全:①检修工作时按规定穿戴好劳保防护用品 ②严格按照三按两遵守进行作业
电气安全:①检修设备时必须执行“断电挂牌”制度 ②注意防火防爆
处理措施:出现安全事故立即上报
(五) 请写出AGV清扫的内容及标准。(10分)
内容: ①AGV外观清扫 ②AGV内部皮带和导条擦拭 ③AGV内部碎片、灰尘清理 ④AGV驱动轮擦拭 ⑤AGV防撞条卫生清理
标准:AGV上下两层手电照射无灰尘,目视无碎片
(六) 掌握对接AGV时机台自动化所需要的硬件条件(10分)
①机台挡板:AGV激光位置安装挡板固定
②机台端红外通讯模块安装:调试与AGV正常握手交互
③反光条位置确认及粘贴:两轨下方正中心,反光条中心点离地20cm
④牛皮纸位置确认及粘贴:两轨正下方,牛皮纸中心点离地20cm
⑤机台轨道宽度:两轨中心距离360mm
⑥机台上轨道皮带上层距地面高度:1160mm;机台下轨道皮带上层距地面高度:450mm
⑦机台皮带转速(以AGV皮带转速一致):3.14 rad/s
⑧机台光电确认:限位/安全光电可靠有效,光电位置保证不会遗漏花篮
⑨机台导条:进料口开口导条,出料口闭口导条
⑩导向轮/过渡轮:保证花篮平稳传输
(七) AGV主要有哪些元器件构成(至少写出10项)(10分)
主激光、侧激光、后激光、脚轮、驱动轮、伺服电机、伺服驱动器、锂电池、皮带、三色灯、LCD触摸屏、开关按钮、Bumper、急停按钮、红外通讯模块、IO板、主控板、安全继电器等构成。
2023年任职资格认证五厂设备AGV专业考试卷(认证一级)
满分100分,80分及格。
一、员工基本信息
工号:
姓名:
基地:
厂/部:
制程/工序:
二、单选题(8题,5分/题)
1、五厂的AGV品牌是(C)?[单选题]
A、罗博
B、玖物
C、旷视
D、斯坦德
2、五厂AGV的服务器IP地址是(A)?[单选题]
A、172.19.167.251
B、172.19.167.252
C、172.19.167.253
D、172.19.167.254
3、AGV与自动化通讯是通过(B)来实现的[单选题]
A、WiFi
B、红外模块
C、OPC
D、主激光
4、五厂AGV的任务管理系统是(D)?[单选题]
A、MES
B、RCS
C、RMS
D、RTD
5、五厂AGV的路径规划调度系统是(A)?[单选题]
A、河图
B、RMS
C、TES
D、Slam tool
6、(C)是用来实时扫描现场环境,反馈AGV服务器当前位置?[单选题]
A、后激光
B、侧激光
C、主激光
D、3D相机
7、自动化机台轨道花篮数量的感应器信息被采集到( A )软件中?[单选题]
A、OPC
B、WinSCP
C、SLCClient
D、UmViewer
8、五厂AGV的控制车体运行的是(D)控制系统?[单选题]
A、河图
B、MES
C、OPC
D、RMS
三、多选题(5题,6分/题)
1、五厂AGV运维人员所必须用到的软件/网页有下列选项中的哪些(ABCD)?[多选题]
A、RMS
B、Slam tool
C、河图
D、RTD
E、Notepad++
2、河图可以控制AGV是下列选项中的哪四个(ABCE)?[多选题]
A、充电
B、调度
C、解环
D、轨道传输
E、返回休息区
3、五厂设备硬件中,专属于AGV的是下列选项中的哪四个(ABCD)?[多选题]
A、主激光
B、Bumper
C、红外模块
D、脚轮
E、电机
4、五厂AGV系统中一个完整的任务生成需要哪些部分正常运转(ABCDE)?[多选题]
A、PAC
B、OPC
C、RTD
D、RCS
E、MES网络
5、AGV的充电桩点检项有下列哪些选项(ABCDE)?[多选题]
A、电源线插头无松动,线皮完整无破损
B、充电桩外壳无形变,摇摆头无异物
C、充电桩轮廓在标记线范围内
D、左右摆动顺畅,弹簧机构无异常形变
E、热成像点检,温度低于45℃
四、判断题(5题,6分/题)
1、维修AGV设备时需要佩戴安全帽等防护用品。(对)
2、AGV是Automated Guide Vehincle的简称,是一种装备有自动导引装置,可实现工业4.0车间柔性化物料运输的智能搬运工具。(对)
3、AGV对接新框架/传统模式的开启/关闭,既可以在设备自动化上操作也可以在OPC上操作。(对)
4、自动化上的红外模块是靠232串口通讯进行数据交互的。(对)
5、AGV调度系统派车逻辑是优先派距离最近的闲置车辆接受任务。(对)
2023年任职资格认证五厂设备AGV专业考试卷(认证二级)
满分100分,80分及格。
一、员工基本信息
工号:
姓名:
基地:
厂/部:
制程/工序:
二、单选题(8题,5分/题)
- 自动化机台与AGV之间是通过______进行信号通信的( D )
A. 反光板 B. 主激光 C. 无线网 D. 红外模块 - 自动化机台轨道花篮数量的感应器信息被采集到( C )软件中
A、WinSCP B、SLCClient C、OPC D、UmViewer - AGV的任务是由什么系统产生( A )
A. RTD B. PAC C. OPC D. RMS - 小车LCD屏幕任务状态栏显示”安全光电无数据报警”表示( C )
A、正在传输 B、任务发出 C、对接失败 D、任务取消 - SE上料自动化轨道上的花篮感应器属于什么光电开关( A )
A、对射型 B、漫反射型 C、磁感应型 D、电磁波式 - AGV车体宽度(包括测激光)为( B )mm
A、900 B、926 C、500 D、750 - AGV是由( D )系统控制车体运行的。
A、 MES B、PAC C、OPC D、RMS - DFH自动化机台轨道上的安全光电属于( B )。
A、对射型 B、漫反射型 C、磁感应型 D、电磁波式
三、多选题(5题,6分/题)
1、 下列选项中说法正确的是(ABCDE)?[多选题]
A、AGV的侧激光是用来检测侧面和前方障碍物的
B、主激光是用来实时扫描现场环境,反馈AGV服务器当前位置
C、PLC常见的输出类型分为 继电器型,晶体管型,晶闸管型 三种
D、AGV空载和AGV满载的速度分别是(1m/s) 、(0.8m/s)
E、自动化机台与AGV之间是通过红外模块以(232串口)协议通信方式
2、 下列选项中造成AGV对接失败的原因(ABCD)?[多选题]
A、设备起转超时
B、握手失败
C、对接中急停被按下
D、卡料错误传输超时
3、 以下哪些行为会影响AGV正常调度效率(ABC)?[多选题]
A、自动化机台上的新框架模式被关闭;
B、AGV接到任务后在没到机台前手动往AGV内补空花篮 ;
C、自动化机台对接口与道路上随意堆放物品;
D、单接任务AGV自动充电
4、 以下为处理AGV堵车情况的措施是(ABD)?[多选题]
A、清理现场障碍物
B、若暂时无法清除障碍物,按照注意事项及手动推车步骤,把AGV推到空旷区域;
C、不处理等AGV自己纠正;
D、根据实际情况优化路线
5、 以下是造成电机异常振动和声音的原因有(ABCDE)?[多选题]
A、 轴承润滑不良,轴承磨损
B、紧固螺丝松动
C、电机内有杂物
D、电机过载运行
E、缺相
四、判断题(5题,6分/题)
1、 AGV的TARGET可以凭自己的个人喜好随意改变 (X)
2、 在监控画面中发现AGV对接安全光电无数据异常,可以远程在电脑上启动AGV消除报警 (X)
3、 AGV与自动化机台通过红外模块实现通讯对接,其中红外模块接线端子的GND接地公共端和电源信号接地线所起功能一致。( × )
4、 OPC采集的自动化机台轨道花篮数目是通过花篮感应传感器将I/O信号上传至PLC,再由PLC传给OPC。( √ )
5、 目前我们车间ROBO自动化上下料机皮带速度控制用的是变频器多段速控制模式,当需要调整自动化与AGV对接时皮带传动速度,则需要调整相应的变频器参数P6。( √ )
2023年任职资格认证五厂设备AGV专业考试卷(认证二级)
满分100分,80分及格。
一、员工基本信息
工号:
姓名:
基地:
厂/部:
制程/工序:
二、单选题(8题,5分/题)
- AGV的电量低于(D)停止接收任务。
A、80% B、60% C、50% D、30% - 产线要求停止AGV上料,应该在(A)软件上关闭任务开关。
A、RTD B、自动化界面 C、UmViewer D、OPC - 下列内容属于对接失败问题原因之一的是(A)
A、轨道离开确认信号超时 B、三色信号灯不亮 C、触摸屏报警 D、网络信号差 - 控制红外通讯和光电的控制单元是(D)
A、TOP Coro B、逻辑Coro C、功率Coro D、I/O板 - AGV本体共有(C)个电机。
A、10 B、12 C、6 D、8 - 可以采集自动化机台轨道花篮数量的软件名称是(D)
A、WinSCP B、SLCClient C、UmViewer D、OPC - AGV是由(D)系统控制小车移动的。
A、 MES B、PAC C、OPC D、RMS - 制绒下料自动化机台轨道上的安全光电属于(B)的光电开关。
A、对射型 B、漫反射型 C、磁感应型 D、电磁波式
三、多选题(5题,6分/题)
1、 保护AGV的安全单元有下列选项中的哪些(ABCD)?[多选题]
A、主激光、侧激光、后激光
B、Bumper/防撞条
C、急停按钮
D、安全继电器
E、抱闸
2、 五厂AGV更新上传已经编辑好的地图需要下列哪些文件(ABC)?[多选题]
A、AikoSolar_yiwu_05.megvii_map
B、Aiko-5-hetu2.0.hetu
C、warehouseID_337971301228478658-v0-rms1.1.1.json
D、Aiko-251-hetu2.0.hetu
3、 五厂AGV与自动化机台实现任务自动下发对接需要准备下列哪些事项(ABCDE)?[多选题]
A、自动化轨道高度、中心距宽度与AGV对齐
B、红外模块正常通讯
C、机台MES网络配置且正常通讯
D、RMS地图、河图地图、数据库机台配置等导入系统OK
E、机台AGV对接软件、OPC、RTD等系统配置OK
4、 五厂AGV到达料台点对接前需同时满足下列哪些条件才能开始握手(ABC)?[多选题]
A、X轴±3mm
B、Y轴±10mm
C、角度±1°
D、Z轴±3mm
5、 Log中:“ B5-FF-FF-03-AA-11-11-13-E8-5B”下列哪些选项说法正确(ABCD)?[多选题]
A、“ B5-FF-FF-03-AA-11-11-13-E8-5B”代表急停信号
B、“ B5-FF-FF-03-AA-11-11-13-E8-5B”其中“AA“代表急停指令码
C、“ B5-FF-FF-03-AA-11-11-13-E8-5B”其中第二个“11“代表急停按钮被按下
D、“ B5-FF-FF-03-AA-11-11-13-E8-5B”其中“13-E8“代表CRC校验码
E、“ B5-FF-FF-03-AA-11-11-13-E8-5B”其中“FF-FF“代表数据长度位
四、判断题(5题,6分/题)
1、 AGV与自动化机台是通过无线网络进行通信的。 (Ⅹ)
2、 AGV的调度是优先最近的车去有任务的机台搬运。 (√)
3、 经常堵车的点一般多以十字路口居多,可以通过在节点增加”胡同”方式优化解决。 (√)
4、 AGV本体Bumper(防撞条)损坏一个也没关系,不影响使用,可以最后一起换。 (×)
5、 AGV重载时候的运行速度为1m/s。 (×)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号