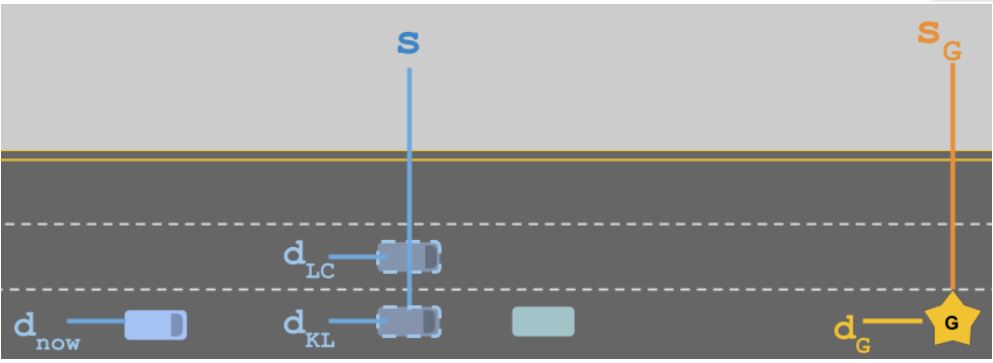
在上图中,蓝色自动驾驶赛车(左下角)正在努力达到目标(金星)。目前它在正确的车道上,但是绿色的车行驶非常缓慢,所以它考虑是应该执行车道变换(LC)还是仅保持车道(KL)。
这些选项显示为带有虚线轮廓的浅蓝色车辆。如果我们想要设计一个处理车道选择的成本函数,那么确定相关变量是有用的。在这种情况下,我们可以定义:

在我们定义一个实际的成本函数之前,让我们考虑一下我们希望它具有的一些属性...
1.考虑Δd ,我们宁愿Δd的绝对值大一些还是小一些?
a 大
b 小
2. 考虑一下因素s 对成本函数的影响,车到变换成本函数相关性距离目标近好还是远好?
a. 远
b. 近
我们需要一个成本函数惩罚大的Δd,同时惩罚Δs小的情况。此外,我们希望确保此成本函数的最大成本永远不会超过1,并且最小值永远不会低于零。
以下哪个建议符合这些标准?
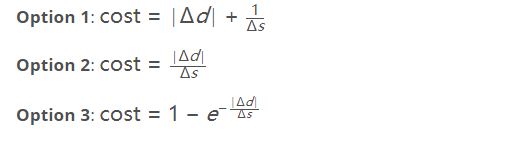
在这个例子中我们发现,选项2是正确的,如果我们称这一比例为X,我们可以使用该函数在有界范围内的任何函数。这些功能在设计成本函数时很有用。这些类型的函数被称为Sigmoid函数

 浙公网安备 33010602011771号
浙公网安备 33010602011771号