数据驱动的方法可能非常有用特别是当我们获得大量的培训数据时。但是在某些方面,纯粹的数据驱动方法是天真的,因为他们依赖
仅根据历史证据来预测未来可能的行为。理想情况下,我们还希望在我们的预测中包括,所有关于驾驶员行为的见解,物理或车辆动力学。
这是基于模型的方法可以帮助的地方。这些方法通常工作的方式如下。
第一步 为每个对象识别所有行为
该对象可能会在目前的情况下做到。车辆的行为可能像改变车道,向左转并为行人,它可能在人行横道上过马路。
对于我们的交集场景,行为可能会持续下去,左转,右转。
不管它是什么,它都需要我们可以用数学来描述的东西。
第二步,为每个行为定义一个流程模型。
过程模型是行为对象运动的数学描述。它是一个可用于计算状态的函数来自状态at的时间t_plus_1的对象
时间t。流程模型必须纳入了一些不确定性,表示我们相信我们的模型多少。
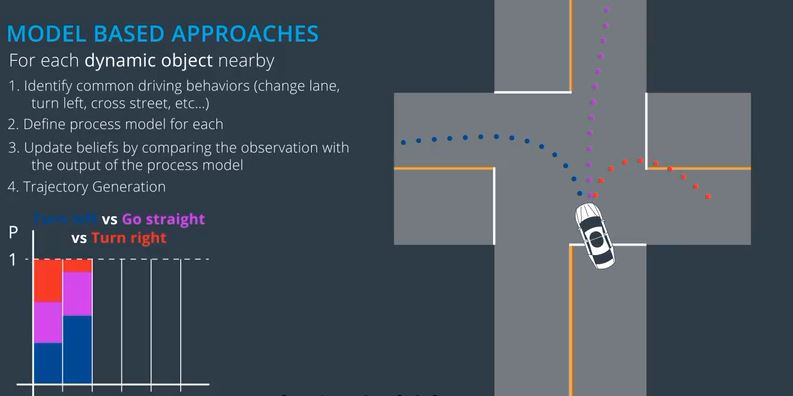
在我们的交集示例中,左转过程模型将产生大致位于这里的不确定的未来状态。
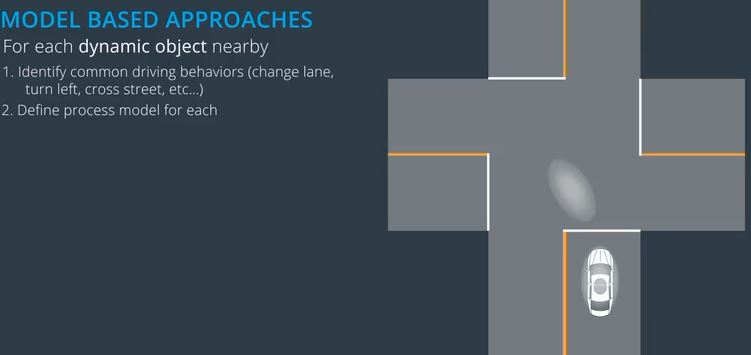
直行过程模型会产生大致位于不确定的未来状态
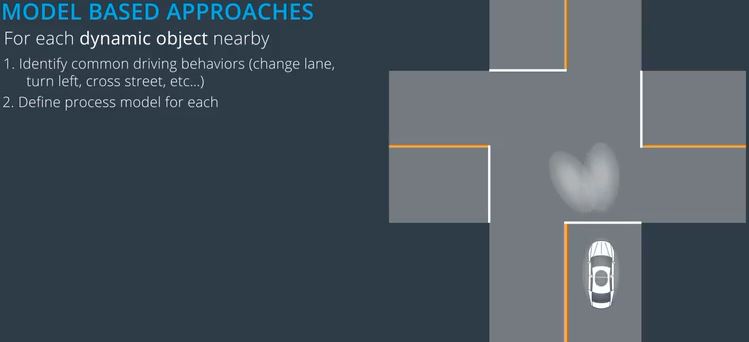
这里和右转的过程模型会产生一个不确定的未来状态大致在这里。
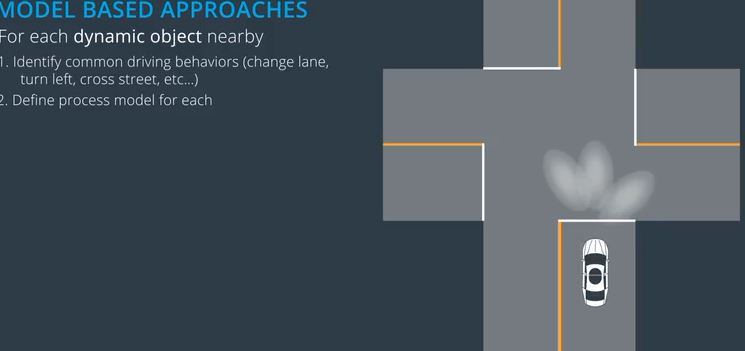
如果您继续运行流程模型,您的不确定性将会增加。
一旦我们有了每种行为的流程模型,我们就可以进入下一步,

第三步,这是使用过程模型来计算每个行为的概率。
这是通过在时间t_minus_1处观察物体的观察状态来完成的,
运行过程模型来计算t时刻对象的预期状态。然后我们比较观察对象的状态时间t与我们的过程模型预测的。
我们使用多模态估计算法来推导每个机动的概率。
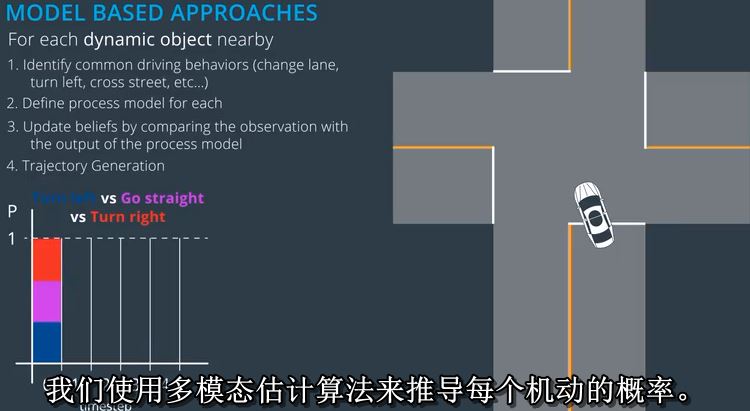
这些算法的目的是保持一些信念司机打算执行每种行为的可能性有多大。稍后我们会详细介绍。
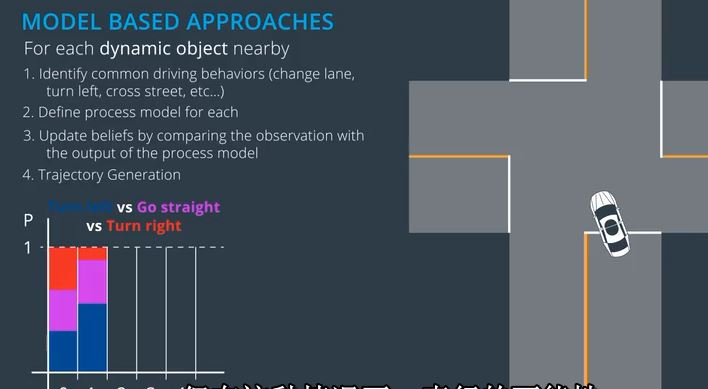
但在这种情况下,直行的可能性或左转的概率高于右转的概率。
第四步也是最后一步是预测每个行为的轨迹。
这通过迭代很容易完成过程模型直到达到预测范围。
在以下视频中,我们更多地讨论我们用来模拟行为的过程模型讨论一个版本的可用于维护信念的多模态估计算法。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号